



图2-29所示为主动发动机电子控制(active engine management control,AE-MC)系统的结构和功能框图。框图显示含节流阀控制(TVC)、自适应巡航控制系统(ACC)、ASR、MSR和加速踏板,以及驾驶人【MAGNETI MARRELLI 2001】。
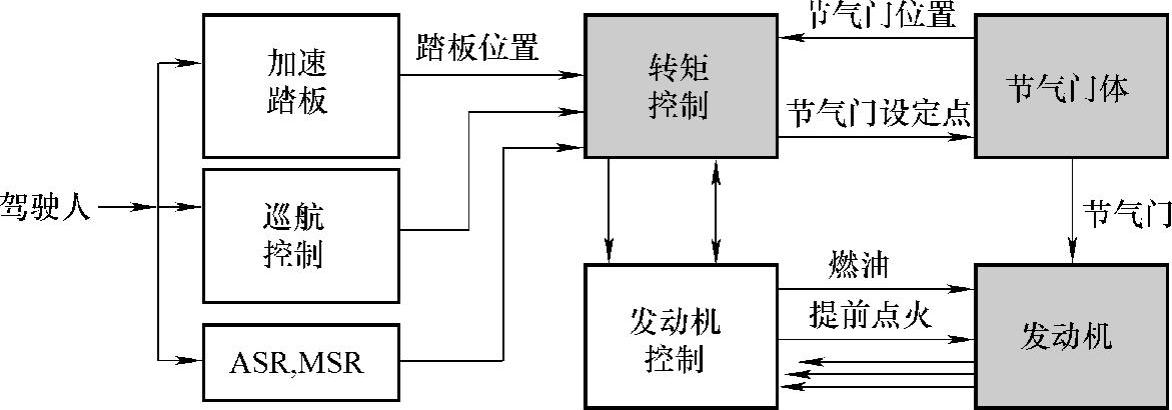
图2-29 含节流阀控制(TVC)、自适应巡航控制系统(ACC)、ASR、MSR和加速踏板,以及驾驶人的主动发动机电子控制(AEMC)系统的结构和功能框图【MAGNETI MARRELLI 2001】
车速机电一体化控制系统的范围可以从简单的风门闭锁设备,到在不同驾驶条件下不断维持设定车速的复杂的数字机电一体化控制器。
当代的车速机电一体化控制系统仍然可以使用一个单独的模块,但它可以从ECE/ICE、ABS和变速器机电一体化控制系统共享数据。
现代ACC系统多使用毫米波雷达传感器。这些毫米波雷达传感器测量与其他汽车的接近速度并调整车速以维持一个恒定的距离。这样的现代ACC系统是可能的,但要想将其推广用于普通的私人汽车,则需要大大降低成本【VALENTINE 1995】。
ACC的目标是在不同路况下维持一个稳定的车速,从而让驾驶人从不断的脚踩加速踏板操作中得到放松。有时候,ACC系统实际上可以通过将节气门漂移限制在小步而改善车辆的SFC。通过使用ECU的力量和速度,以及模糊逻辑(FL)软件设计,可以设计出优秀的ACC系统【BANNATYNE 1992】。
由于其设计语法使用简单的语言学,模糊逻辑(FL)让车速误差计算稍微容易些。比如,IF车速差为负的和小的,THEN稍稍加大节气门开度。然后输出进行调整以稍微加大节气门开度。
节气门位置更新规则由另一个FL程序确定,该FL程序查找驾驶人的巡航性能要求(慢、中等或快速反应)、应用类型(小号、中号、大号ECE/ICE)和其他的ACC系统工厂预设值参数。
图2-30所示为一个计算正常节气门位置的FL设计的一部分。其他部分会计算其他输入的影响,如驾驶人习惯、ECE/ICE类型等【VALENTINE 1995;FI-JALKOWSKI 1997A】。
其他的程序设计需求包括验证输入信号落在预期边界之内。比如,可以检测出某个坏掉的或间歇工作的车速传感器。
使用简单的规则(如IF重新开始并且有一个大的车速误差),THEN稍稍加大节气门开度,FL设计能把加速限制在恢复值【VALENTINE,1995】。
可以使用一个实用的车距传感器,同时ACC也可以编程来维持一个恒定的车速或与另一辆车之间的一个恒定的距离。
其他ACC方法应该包括:行驶在某些交通管制区域时,接收给出车辆最优车速的路边信号。
AEMC里面的ACC,也可以与行驶速度(road-speed)管理相集成。该AEMC包括:预测距离控制(preview distance control,PDC),与DBW AWD驱动机电一体化控制系统合作的线控制动(brake-by-wire,BBW)全轮制动(all-wheel-braked,AWB)转向机电一体化控制系统。同时,动力输出装置能够访问到一个手动ECE/ICE TMC,如图2-31所示【TÖRNGREN 2002】。
把车速和与其他车辆的距离维持在一个期望值的距离控制(DC),安全性意味着:
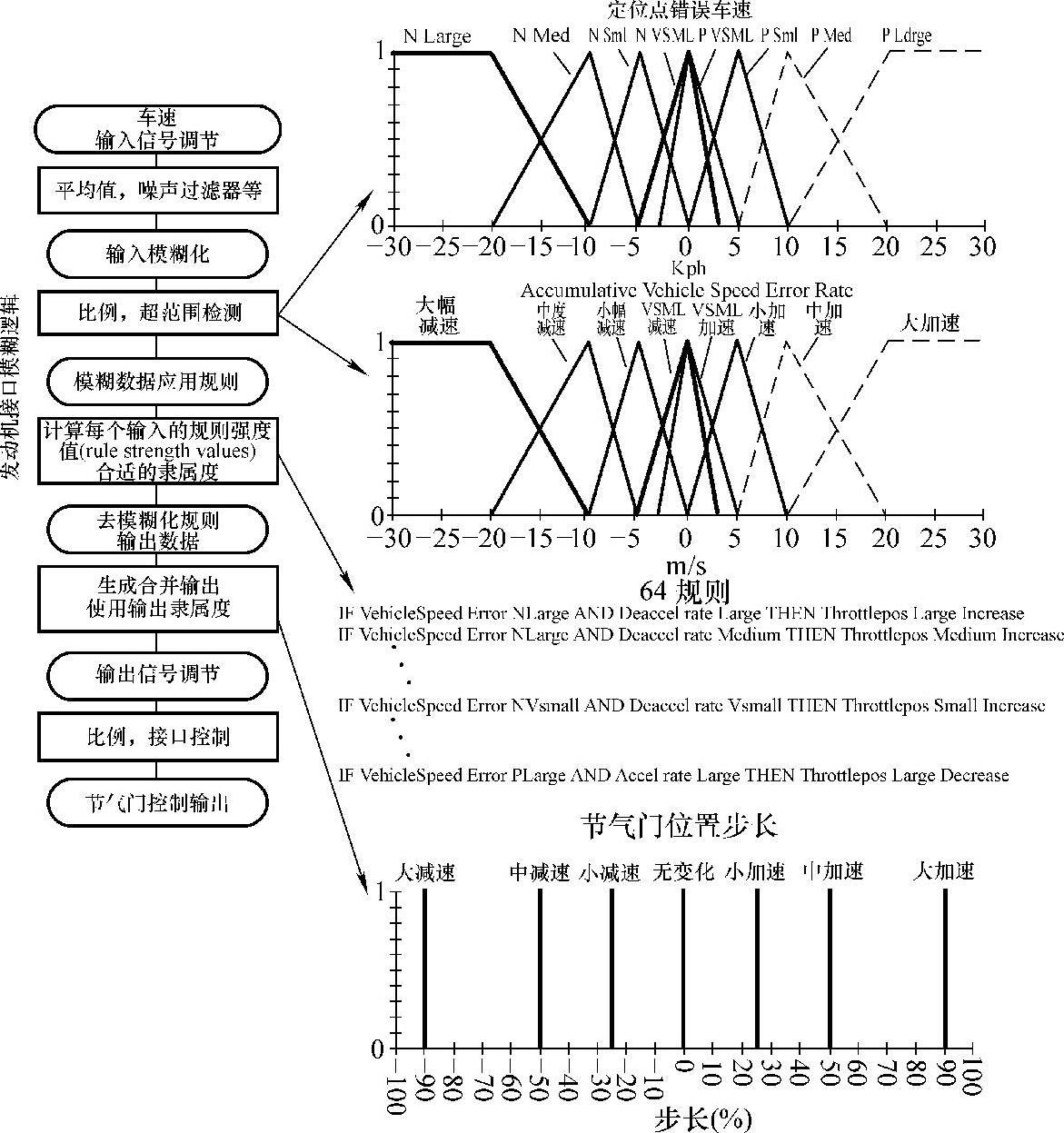
图2-30 模糊逻辑(FL)车速程序流程【VALENTINE,1995】
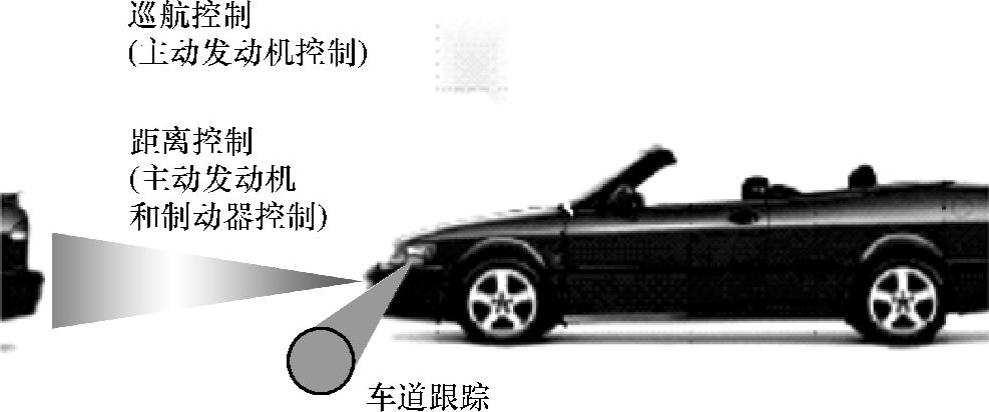
图2-31 自适应巡航控制(ACC)系统和预测距离控制(DC)系统的总布置图【TÖRNGREN 2002】
• 可靠工作,如达到期望的距离。
• 担保,比如,某处的某个故障不会引起不希望有的ECE/ICE命令。
相比线控转向(SBW)全轮转向(AWS)转向机电一体化控制系统,在这里转向功能的可靠性也直接与安全性有关。
雷达巡航控制(Rader Cruise control,RCC)系统(含低速跟随模式):当车速低于30km/h时,如果前行车辆停车,则RCC会给驾驶人一个明显的警告/警报来刺激他进动制动;如果驾驶人未及时制动,则RCC会使汽车停下(图2-32)【AMEMIYA 2004】。
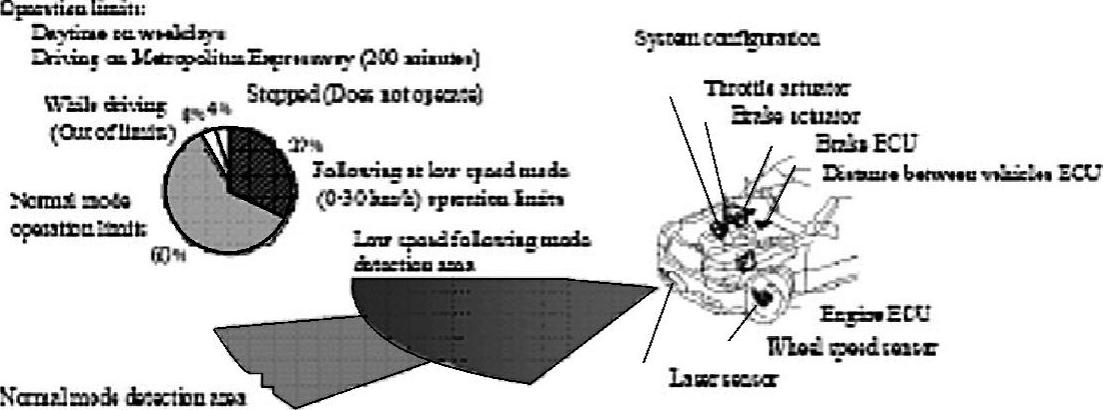
图2-32 雷达巡航控制系统总布置图(注:此图为作者原设计图,未作改动)
雷达巡航控制(RCC)系统(内置制动机电一体化控制系统):根据位于保险杠中的激光雷达传感器等的信息,RCC可以保持一个与车速成比例的距离,控制的车速在前面车辆建立的巡航车速之内;如果需要减速,则使用制动进行减速。如图2-33所示【AMEMIYA 2004】。
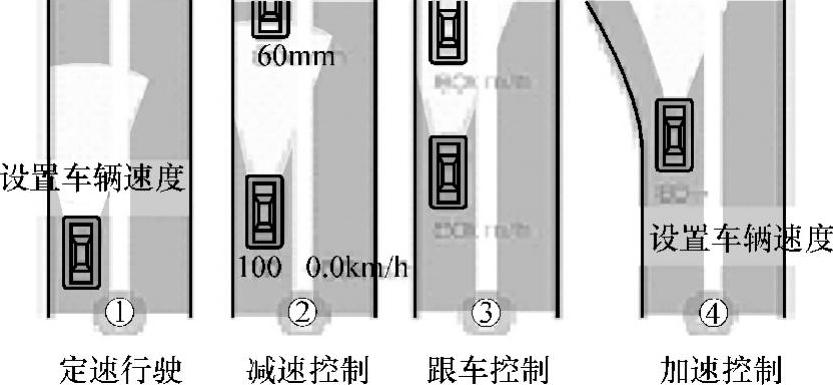
图2-33 雷达巡航控制(RCC)的总布置图【Toyota;AMEMIYA 2004】
车道监控(lane monitoring control,LMC)系统:当汽车行驶在公路上时,一个彩色CCD摄像机持续不断地测量车辆和公路上白线(黄线)之间的距离,测量结果会引导对车后头的监控(图2-34)。
当达到了驾驶人设定的距离时,会有警报声。但如果转向灯亮,则该警报声不会响【AMEMIYA 2004】。
夜视系统:该系统显示路况、障碍物,以及其他的车辆和行人。在夜间行驶时,当物体处于车头灯范围之内或超过了车头灯的范围时不易被观察到。夜视系统提供了更广的可见度(图2-35)。
夜视系统使用近红外(infrared,IR)光来显示公路路面和形状、公路上的坠物,能显示几乎关于路面的所有信息【AMEMIYA 2004】。
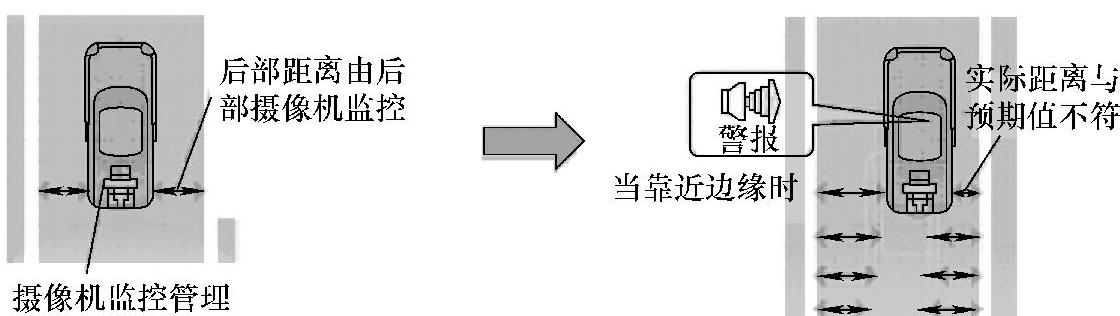
图2-34 车道监控的总布置图【Toyota;AMEMIYA 2004】

图2-35 夜视系统的总布置图【Toyota;AMEMIYA 2004】 (注:此图为作者提供原图,未作改动)
语音倒车监视器(back guide monitor with voice,含夜视能力):使用来自一个转向传感器的信号,汽车的预测线路被估计并显示在监视器上(图2-36)。这帮助了那些倒车有困难的驾驶人,如倒车入库或在路边侧方停车。
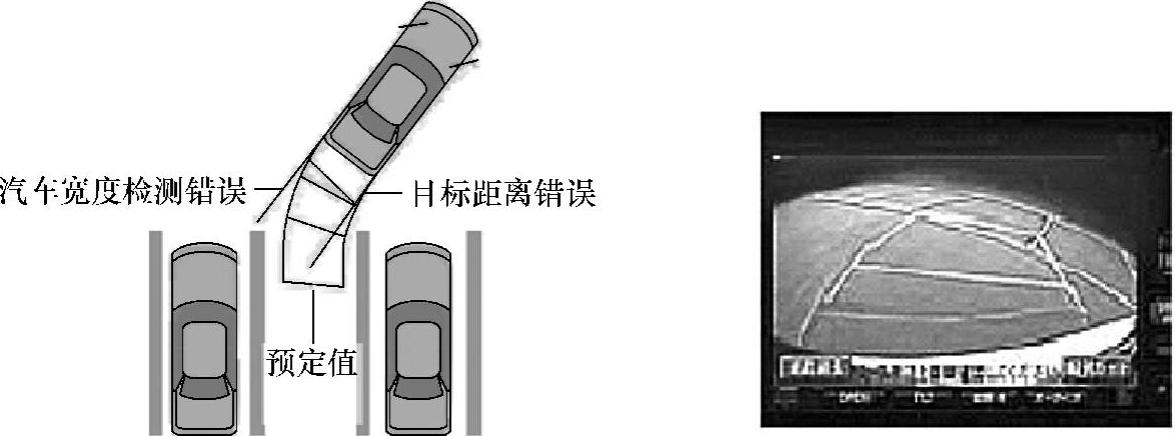
图2-36 语音倒车监视器的总布置图【Toyota;AMEMIYA 2004】
车尾的彩色方向监控摄像头(彩色的)利用近红外(near-IR)无线电传输,使得夜间的可见度得到了改善【AMEMIYA 2004】。
智能泊车辅助控制(intelligent parking assist control,PAC)系统:世界上首个泊车倒车时的机电一体化转向、辅助机电一体化控制系统,使用的场景是将车倒入车道或路边平行停车(图2-37)。驾驶人只需估计周围环境和操作制动装置,且无需转动转向盘,驾驶人就能实现泊车。
该功能对新手和有停车困难的驾驶人非常有用。该功能集成在汽车制造商的一套可选的DVD语音导航系统、电视调谐器和带夜视的车后方向监控系统中
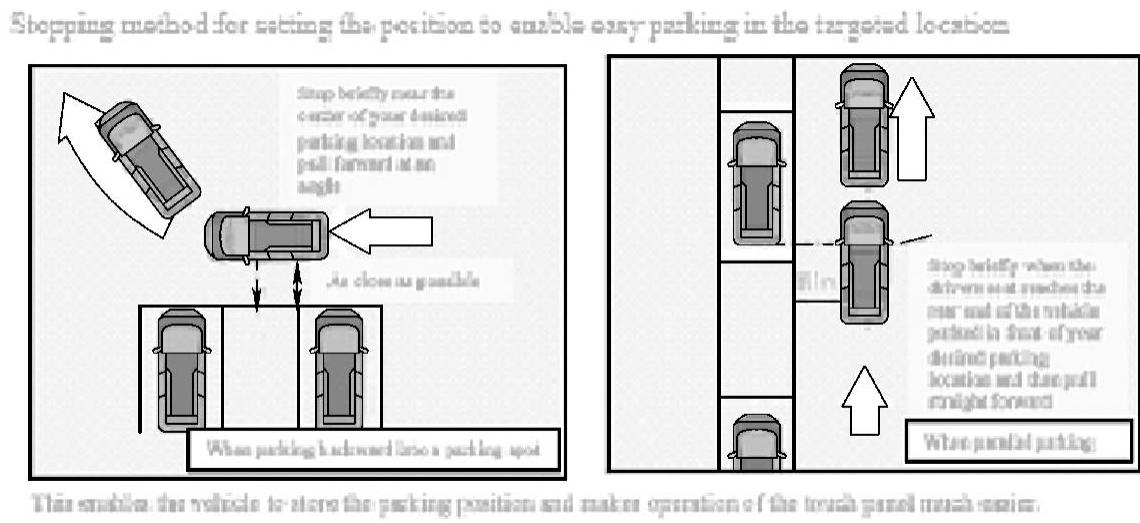
图2-37 智能泊车辅助控制系统的总布置图【Toyota;AMEMIYA 2004】 (注:此图为作者提供原图,未作改动)
【AMEMIYA 2004】。
智能制动辅助控制(intelligent brake assist control,BAC)系统:在需要快速的避碰动作来避免一个汽车追尾时,该系统通过发出警报刺激驾驶人继续操作(图2-38)。
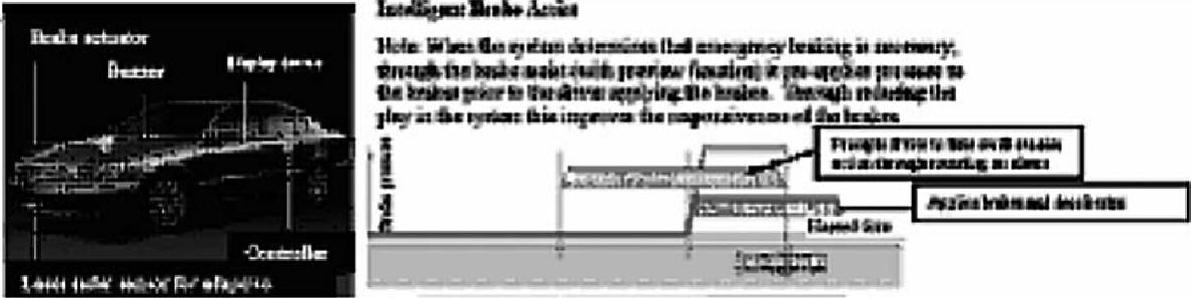
图2-38 智能制动辅助控制(BAC)系统的总布置图【Nissan;AMEMIYA 2004】
(注:此图为作者提供原图,未作改动)
如果驾驶人决定的动作已不可能避免一个追尾碰撞,则该机电一体化控制系统使用制动来减速【AMEMIYA 2004】。
制动辅助系统(brake assist,带预测功能):根据使用毫米波雷达获得的车辆本身和前方车辆之间距离和相对速度的检测情况,在系统决定需要紧急制动时,制动辅助系统在使用制动之前详细考察制动的液压或电压,由于系统中处理过程的减少,改善了制动的响应能力和有效性【AMEMIYA,2004】。
车道保持支持控制(lane-keeping support control,LSC)系统:给转向系统一个轻微的转矩,以便在直路上的一个车道内保持行驶;在车辆可能偏离车道时,用声音和图像显示来支持驾驶人。不使用任何转弯的转矩。
当转向盘(HW)或侧操纵杆转动变道,或者转向灯打开时,该功能暂停。在完成变道等之后,该功能再次开启,摄像机再次能够探测车道【AMEMIYA 2004】。
自适应巡航控制(ACC)系统(激光雷达类型):由于设置了驾驶人的期望车速(40~100km/h),从而也限制了行驶的恒定车速。车辆以恒定车速行驶时,如果跟上了同一车道的一辆车,则车速会逐渐降低,从而让后方车辆和前方车辆之间保持一个设定的距离。当后面车辆的前车离开时,车速会逐步增加,直至到达设定的行驶恒定车速。在车辆定速行驶或恒定车间距离行驶期间,如果另一辆汽车驶进车道,则该机电一体化控制系统让车辆减速,并在需要驾驶人干预时,发出警报通知【AMEMIYA 2004】。
主动驾驶辅助(active driving assist,ADA)系统:凭借一个立体摄像机和毫米波雷达,可以获得车辆前方交通状况的全面确认。由于加速、制动和车辆动态控制系统(vehicle dynamics control,VDC)的协同机电一体化控制,必要的机电一体化控制和警报得以执行。有关前方车辆和反向行驶车辆的信息由传感器融合技术提供,并通过中央显示屏“米”(metre)显示和警报提示驾驶人。通过增加毫米波雷达传感器,扩大了应用范围(图2-35)。传感器响应远距离物体能力已经提高,这种能力在如太阳和雪天环境等恶劣天气中得到了验证【AMEMIYA 2004】。
自适应巡航控制系统(adaptive cruise control,ADA部分):使用一个摄像机和雷达检查前方车辆。当同一车道前方没有任何车辆时,按驾驶人设定的速度继续行驶(图2-39)。
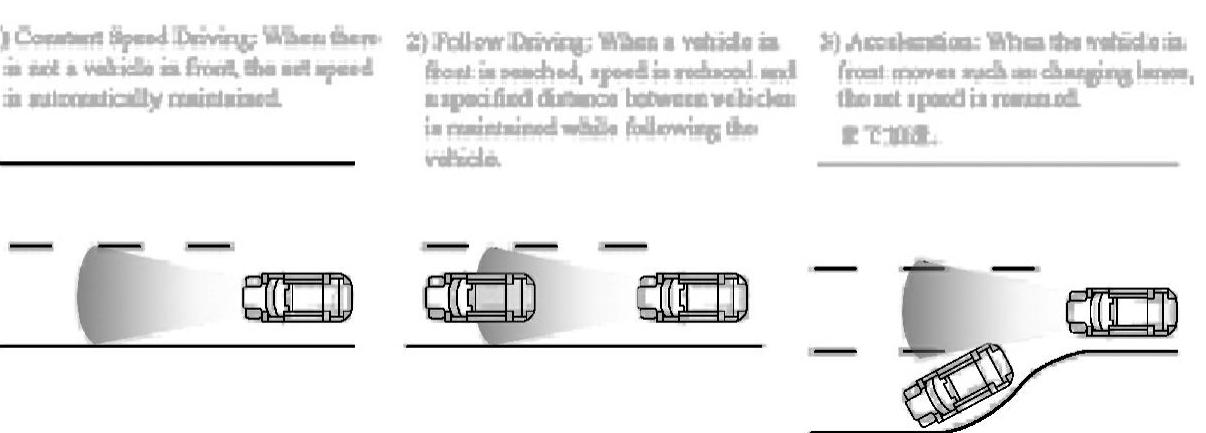
图2-39 自适应巡航控制系统(ADA部分)的总布置图【Subaru;AMEMIYA 2004】
(注:此图为作者提供的原图,未作改动)
若前方有车,则使用加速和制动指令自动控制车速来匹配前车的车速。若前车离开,则车速重新回到驾驶人设定的值。
车辆动态控制系统(vehicle dynamics control,VDC):根据驾驶人操作和车速,比较车辆的实际性能和预估性能。通过DBW AWD驱动机电一体化控制系统、ECE/ICE、变速器和制动的协同机电一体化控制,以减少两车性能之间的差异(图2-40)。
该系统只在危险预测出现时才会被激发。此外,当发现该预测对驾驶状况必要时,存在一个允许驾驶人关闭该系统的开关【AMEMIYA 2004】。
车道保持辅助系统(lane-keeping assist control,LAC):LAC使用位于临近汽车风窗玻璃顶部处的C-MOS摄像机捕获的图像确认车道。使用助力转向系统(EPS)施加合适的转矩,允许在几乎所有的高速公路上使用,帮助在直路和最小半径为230m的弯道上以大于65km/h的车速保持车道。如图2-41所示。
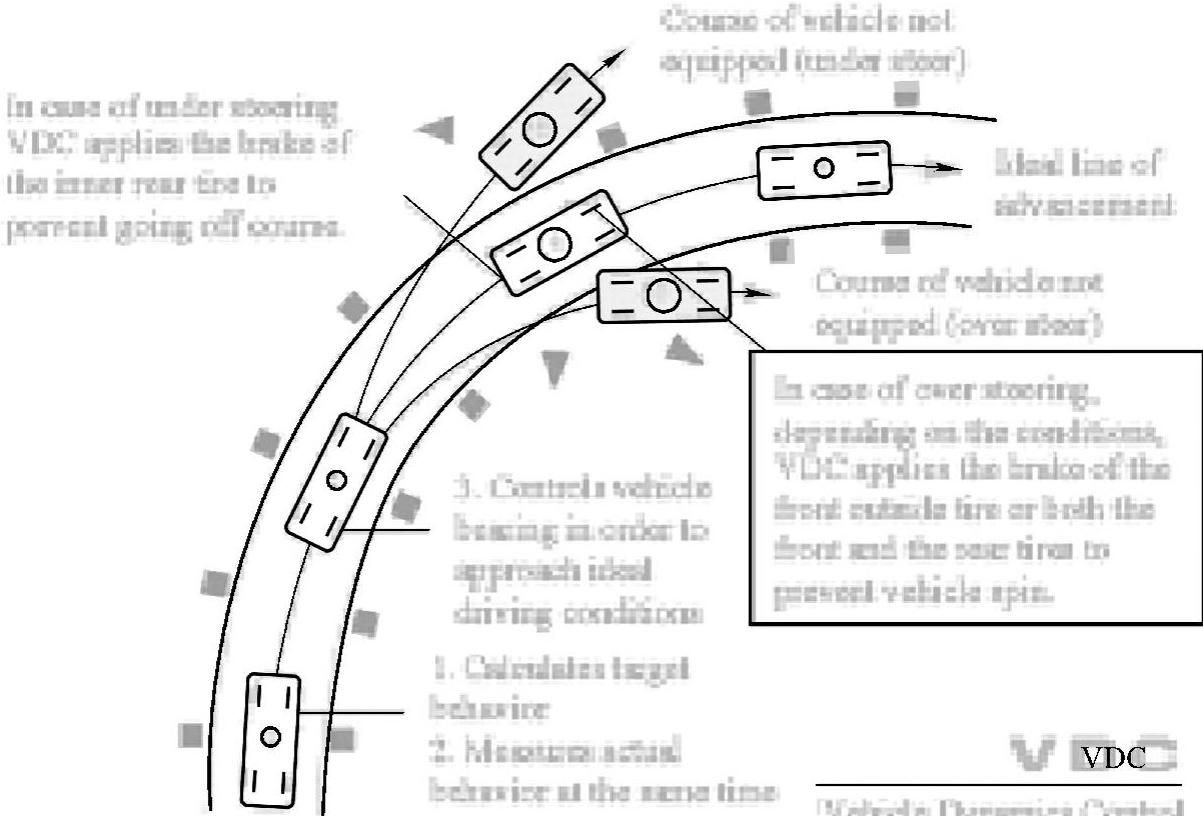
图2-40 车辆动态控制系统(VDC)的总布置图【Subaru;AMEMIYA 2004】
(注:此图为作者提供的原图,未作改动)
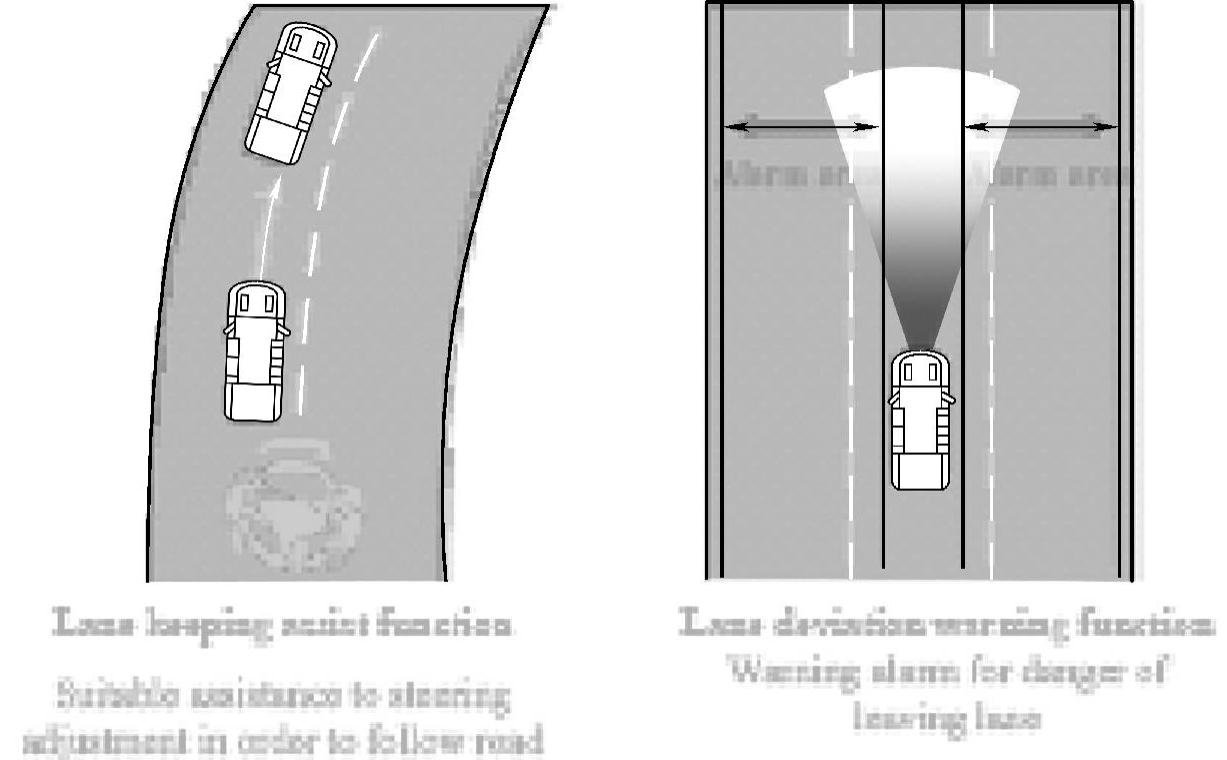
图2-41 车道保持辅助系统(LAC)的总布置图【Honda;AMEMIYA 2004】
(注:此图为作者提供的原图,未作改动)
此外,要是一个偏离车道事件是可行的,则驾驶人倾向于使用一个警报。通过转向盘或侧操纵杆的灯操作,可以使驾驶人的意识保持在车道上;驾驶人的意图能被传达出来,从而保持车辆稳定在正确的车道【AMEMIYA 2004】。
车道偏离警告系统(lane-departure warning control,LWC):造成无意的车道偏离的最常见原因是驾驶人不佳的集中度。统计显示,在欧洲和美国,超过30%的事故原因是人为疏忽【VALEO 2004A】。
因此,有些车辆制造商提出了一个革命性的解决方案。该方案对驾驶人无意的车道偏离发出警告,这可能会减少事故的数量。
该LWC系统以一个高技术视频处理系统为基础。它在一个单一装置中整合了先进的信号处理,能识别前面的道路。在检测到无意的车道偏离期间,如果驾驶人未能使用指示灯,则会通过一个音频或触觉系统警告驾驶人。
高速处理系统为驾驶人提供精确和及时的警报,保证了对偏离的即时纠正。采用LWC系统,客户能更安全地驾驶,能在没有使用指示灯就变道时即被系统警报告知。一个微型的装风窗玻璃式电子视频传感器,在车辆刚偏离车道时就发出警告。这种高技术视频处理机电一体化控制系统在车辆无意偏离正确的车道的同时,就向驾驶人报警。
该LWC系统具有如下特性【VALEO 2004A】:
• 其电子视频传感器安装在风窗玻璃的后面或保险杠里面。
• 高图像处理速度在需要时可警告驾驶人;
• 驾驶人座位发出一个报警或振动给出提示。
智能照明控制(intelligent lighting control,ILC)系统:ILC系统改进弯道可见性达90%。在夜间,在带传统车灯的车辆中,驾驶人不得不依赖减弱的可见度。光束不管环境如何,均指向前方。在弯曲路上,这些光束给了驾驶人很低的前能见度。有些车辆制造商【VALEO 2004B】为此开发了双向照明解决方案。这些解决方案能单独安装或组合安装以保证各种路况下的最佳能见度,如图2-42所示。

图2-42 夜视智能照明控制(ILC)系统【Valeo;VALEO 2004B】
动态弯曲光(dynamic bending light,DBL)改善在中高车速的宽弯道的视觉。一个车用Xenon复合功能投影仪根据汽车记录的方向,使远光灯和近光灯中的光束旋转。
固定弯曲光(fixed bending light,FBL)改善在低中车速十字路口急弯中的能见度和安全性。一个附加的光源被集成进车头灯,在车辆每侧照亮一个45°的区域。采用弯曲光,光束能沿前面的路照亮驾驶人最需要光的地方。基于车辆信息,如车速或转向盘角度,光束自动适用前面的路,从而在弯道提供两倍的能见度。
驾驶人每次在夜间驾驶中能享受的一种技术,能带来:
• 道路能见度提高。
• 安全性改善。
• 疲劳降低。
• 压力减轻。
弯曲光(bending light):最先进的不仅提供高技术图像而且提供改善的道路安全的技术。
动态弯曲光(dynamic bending light,DBL):用DBL,近光灯旋转以照亮弯道。
固定弯曲光(FBL):有些汽车制造商【VALEO 2004B】开发了FBL技术以让光适应急弯、拐角、十字路口。一个附加的固定光源朝向车辆外部,并根据转向角逐渐打开。
一个高效的风窗玻璃洗涤器控制(windscreen washer control,WWC)系统:没有人会想不到用热水清洗脏的盘子,因此,为什么不把同样的方法应用到清洗车辆的风窗玻璃呢?这个问题让有些汽车制造商【VALEO 2004C】开发了这种创新性的清洗液加热系统。该系统能有效地清洗风窗玻璃并除霜。WWC系统安装在E-M-F泵和洗涤器喷嘴之间,它在点火刚打开就激活,并在需要时保持可用。结果如何呢?结果是驾驶人的舒适和安全性得到了保证!一个有效的WWC系统通过加热清洗液而改善了风窗玻璃清洗效果。从而使风窗玻璃污迹和结冰更容易被清除。这种系统易于安装,也适合所有的车型。
自主和自动清洗液加热系统有如下的特性【VALEO 2004C】:
• 汽车点火1min后,清洗液是热的并可供使用。
• 到达洗涤器喷嘴时温度约为65℃。
一个有效的WWC系统能及时加热清洗液,以保证所有行车条件下更好的能见度。
自适应驱动力控制(adaptive traction control,ATC)系统的目的是避免驱动轮打滑,以响应自1987年就已使用的多余节气门(submission of surplus throttle)。带有强大ECE/ICE的汽车,特别容易受到驱动轮起步加速和/或在低附着力路面下的打滑的不利影响。这种不利影响降低了DBW FWD车辆的转向反应,减少了DBW RWD车辆的稳定性,造成有效加速力的失效。
左右侧水平牵引力之间的巨大差异引起驱动轮在光滑的公路/越野路面上过早打滑。在这些情况下,在两个车轮的有效加速力可以被减少至与低附着力侧可用的附着力相对应的水平。ATC系统促使车轮滑转处于机电一体化控制下,从而让车轮在高牵引力公路/越野路面上使用公路/越野路面加速力的最大值。
想要优化车辆稳定性(用RWD)和转向机电一体化控制(用FWD)的系统,必不可少的条件是维持可接受的横向驱动力。最简单的结构是通过控制ECE/ICE转矩。两个驱动轮传递相同的动力,该动力按与低附着力一侧车轮可用的附着力相对称的力进行估计,通过这种方式,以更大的附着力呈现非常广泛的横向驱动力储备。当两个驱动轮的水平驱动力大致相等的时候,ATC系统提升了车辆稳定性(转向机电一体化控制),同时提高了可达的有效加速能力。该有效加速能力大于在一辆失控的车轮打滑的汽车上可用的加速力【CZINCZEL 1995】。
在驱动力(动力)必须传递至附着力有相当大变化的公路/越野路面的时候,说明这种驱动力的优化达到了一个巅峰。
传统乘用DBW AWD汽车的传动轴装有一个M-M差动装置;连同至主动轮的均匀转矩分配,该差动装置允许车轮角速度几乎无故障的差动(如在拐弯处)。
这种装置通常产生合适的车辆动态响应,因为平均分配的驱动转矩抑制了车辆横摆。另一方面,在驱动轮的力传递潜能中的差别,可汇集最大驱动力请求以披露设计原则中必需的可靠性。
汽车中ATC的开发发生于20世纪80年代。这一时期,机电一体化正在给现代车辆赋予生机,促使机电一体化控制系统发展迅速。
ATC是在ABS技术进步的基础上开发的。ABS技术的这些进步让该机电一体化控制系统能预防车轮打滑并改进转弯操控。ATC最初是为高性能赛车而开发的。
这些车辆需要性能、速度和机动性,也就意味着需要卓越的机电一体化控制技术。
在团队寻找对手的优势时,一级方程式F1赛车首先采用了ATC技术。F1赛车开发这种技术来控制赛车高速经过急转弯、光滑路面时的车轮打滑,同时允许机电一体化控制的电源和维护的一致应用。
在2010年前后,车辆的稳定性和操纵性(vehicle stability-and-handling,VS&H)成为普通道路车辆的一个主要问题。人们开始寻找能提供安全和有效驾驶的车辆,与此同时DBW 4WD的热衷者也在他们的越野车上找寻卓越的操控。
随着ATC技术越来越为人所熟悉,该技术的开发成本更低,更适合实际的日常车辆应用。目前,ATC系统与其他的车辆机电一体化控制系统,如ABS、SBW 4WS和机电一体化控制的DBW 4WD驱动系统结合使用,来提供卓越的机电一体化控制系统。
ATC系统是一个闭环反馈机电一体化控制系统,它用在大多数新汽车上来阻止车辆在快速转弯或加速时失去驱动力。基本上,ATC系统是ABS系统的一个增强,它阻止如下情形下的车轮打滑:加速,转弯,在湿滑路面,越野。
这种系统有传感器对全部四个车轮的角速度值进行检测。接下来系统处理角速度信息,并确定是否某个车轮比其他车轮转得更快。然后该ATC系统通过很多方式使打滑驱动轮的转矩减少。有些ATC系统阻止车轮打滑的策略包括:制动;停止供油;中断火花;减小节气门开度;改变传动(图2-43)【MEMMER 2001】。
机电一体化控制的目的是维持车轮和道路之间的驱动力。要做的是,修正由于太大的加速、滑路或转弯而引起的任何损失,并快速恢复驱动力。行驶中的驱动力损失可能是非常危险的。
当ABS安装在车辆上时,它能帮助处理减速时的驱动力损失。换句话说,如果需要在行驶时快速停车(例如,前方有人未看到你过来而危险地驶出),那ABS就是驾驶人此时最需要的系统。它可以防止车轮在制动时被抱死而产生侧滑。这是有益的,因为当车轮仍然在旋转时会出现车胎和道路之间的最大抓地力。这类似于ATC的工作原理【GODFREY AND YATES 2002】。
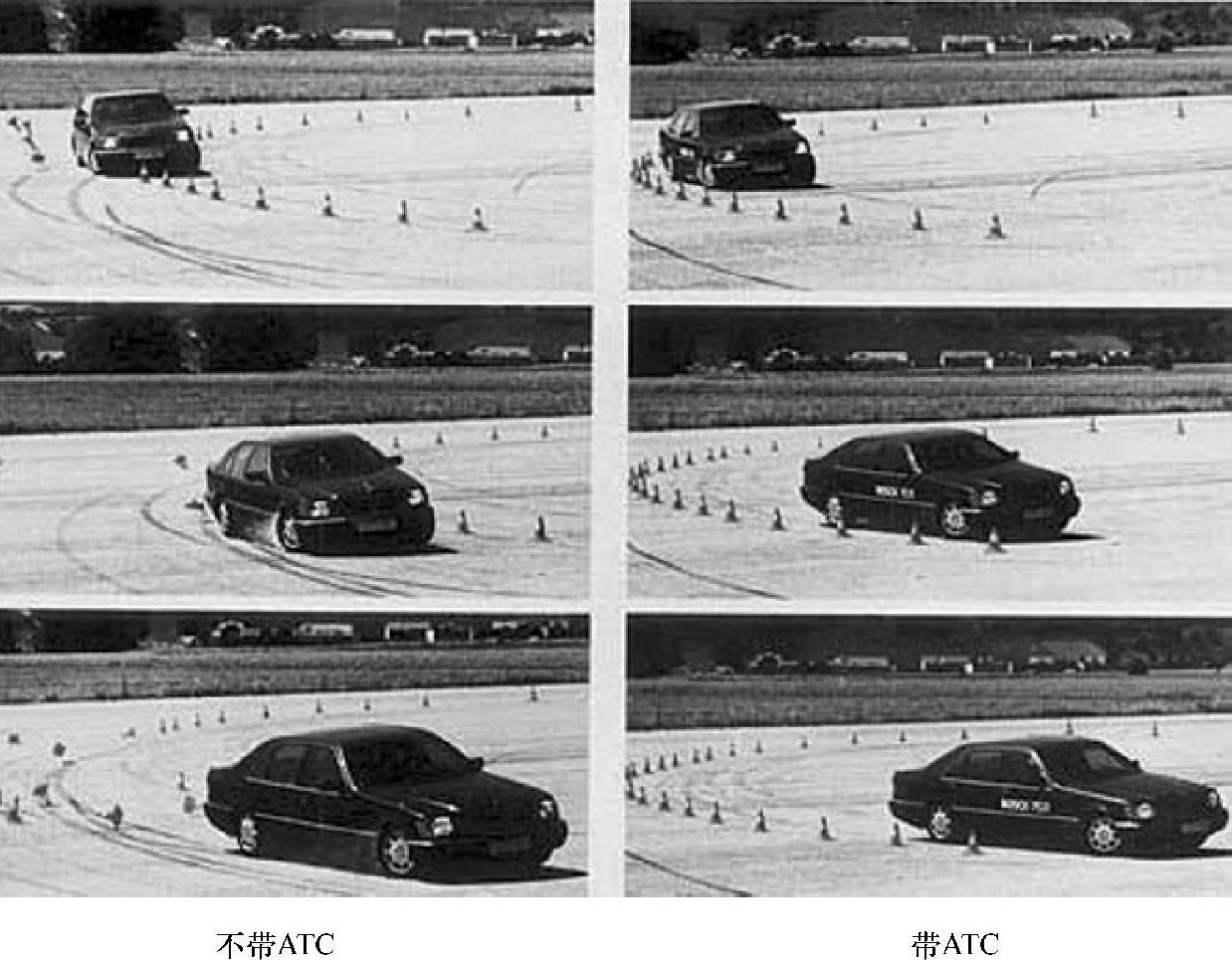
图2-43 带汽车测试自适应驱动力控制(ATC)的博世试车跑道【Robert Bosch Corporation;MEMMER 2001】
虽然术语“自适应驱动力控制”暗示驾驶人可以在任何时候控制车辆的轮胎和道路之间的驱动力,但事实并非如此。汽车中的ATC只是专门处理加速时的驱动力损失的。例如,如果某位驾驶人转入一条热闹的马路并试图驶出进入车辆间的小缝隙中,那么此时驾驶人想要该车辆所能提供的最大加速力。
如果这条路有点湿并且驾驶人驶出,则车胎可能打滑,这可能会带来灾难性的后果。与ABS一样,众所周知,轮胎能获得的最大摩擦力在它们开始明显打滑之前出现。因此,ATC系统的目的是给轮胎提供加速时可能的最大的抓地力。通过减少传送至任何打滑轮胎的动力直至它们获得想要的抓地力,可以实现该目的。在图2-44所示的图表中,显示了相对于不同轮胎情况打滑程度的一个轮胎和道路之间遭受的摩擦力【THOMAS 1998】。
获得快速而准确的反应对于维持安全的车辆运行是至关重要的。为了获得最佳的系统反应,考虑系统的上升时间、百分比超调、建立时间和稳态误差等是很重要的,这些会在下面进行解释。所有这些因素应被减少至系统能有效运行的一个最低水平,这些因素受系统内所含全部组件的影响。组件反应越快,则系统的反应就越快。图2-45显示了一个典型的系统响应【GODFREY AND YATES 2002;THOMAS 1998】。
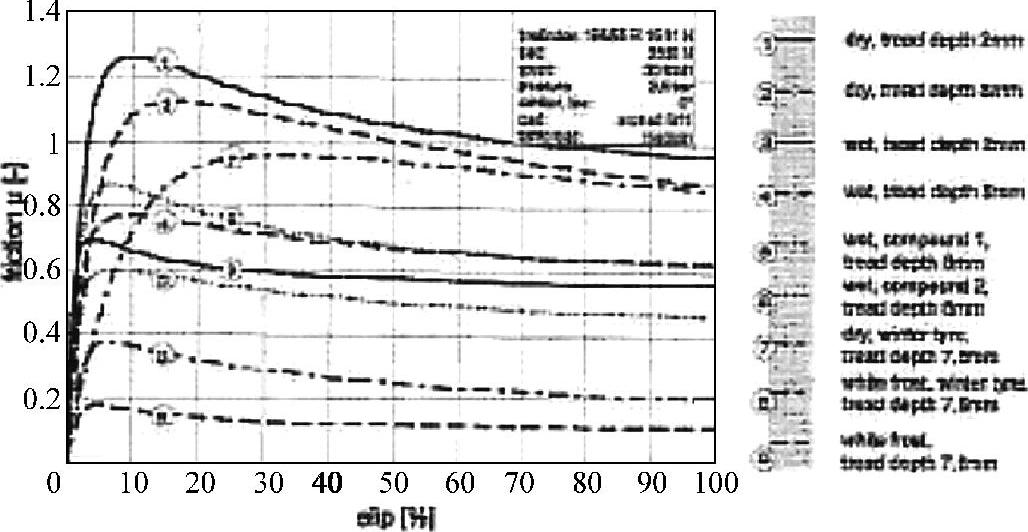
图2-44 与百分比滑移相对的摩擦力【RACELOGIC;THMOAS 1998】
(注:此图为作者提供原图,未作改动)
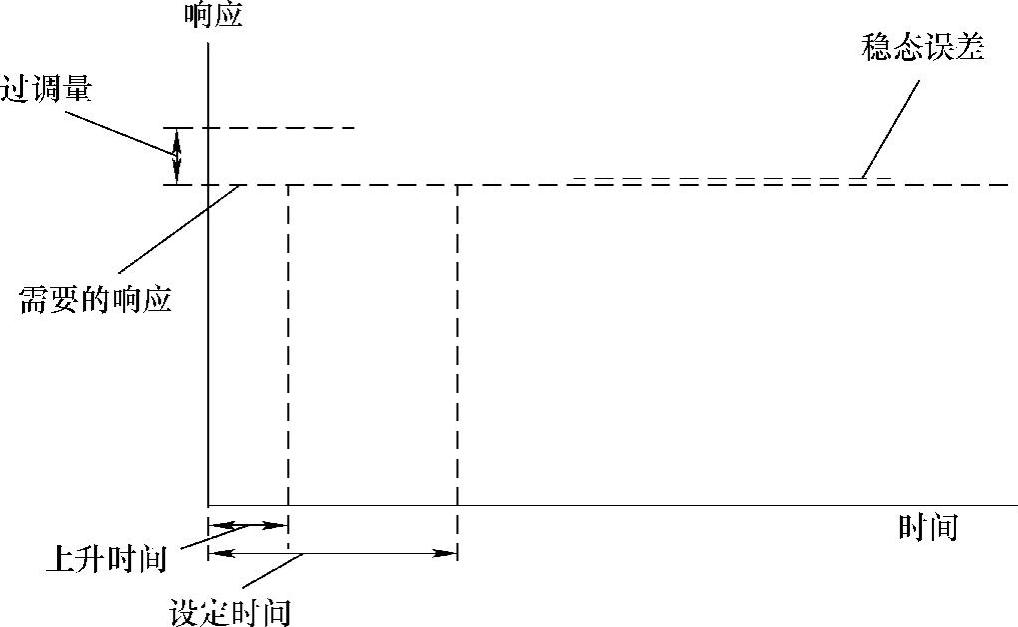
图2-45 一个典型的系统响应物理模型【RACELOGIC】
在任何一个时间点,系统都在努力获得需要的响应。对一个新的需求做出反应并完成它,系统中会有一个延时。这个延时称为上升时间。接下来系统想要停留在该点来发挥最大效益;然而,这在物理上是不可能的,并且引起一个超调量。于是,系统必须把自己设置在一个所需的位置。随着时间趋向于无穷大,给定的响应与所需的响应之间的任何差别称为稳态误差。ATC的精髓在于预防轮胎的非期望的打滑。这可能对危险处境下能快速响应是至关重要的。同样地,如果制动过大,系统超调会造成车辆的机电一体化控制低效,阻碍了车辆迅速加速的能力。该机电一体化控制系统减弱了这些因素的影响,包括使用补偿器和快速电气设备【GOD-FREY AND YATES,2002】。
ATC系统是一个反馈机电一体化控制系统。控制器是做决定是否需要采取任何动作的部分。控制器持续地从传感器接收信号并向执行机构发送它自己的信号。下来它接收传感器的反馈,该过程每秒循环多次。这些传感器持续地测量旋转的角速度,然后控制器比较轮胎的角速度。一旦确定某一轮胎的角速度相对其他轮胎的角速度太大,则控制器就向执行机构发送一个信号(如火花塞和制动器)。该信号告诉ICE中的火花塞稍后点火,并/或告诉制动器制动“捣乱的轮胎”,从而减少到轮胎的有效功率输出,降低了轮胎旋转的角速度。这种功率降低持续,直至控制器确定从传感器接收到的信号表明现在车轮正以彼此充分接近的角速度旋转(这意味着道路和轮胎之间更大的摩擦力正在保持)。该控制器接下来向执行机构发送一个信号,告诉执行机构恢复它们的正常运行。该ATC系统能与已有的EM2C系统结合使用,来提供更有效率的控制系统。图2-46显示了整个系统的一个基本情况【GODFREY AND YATES 2002;THOMAS 1998】。
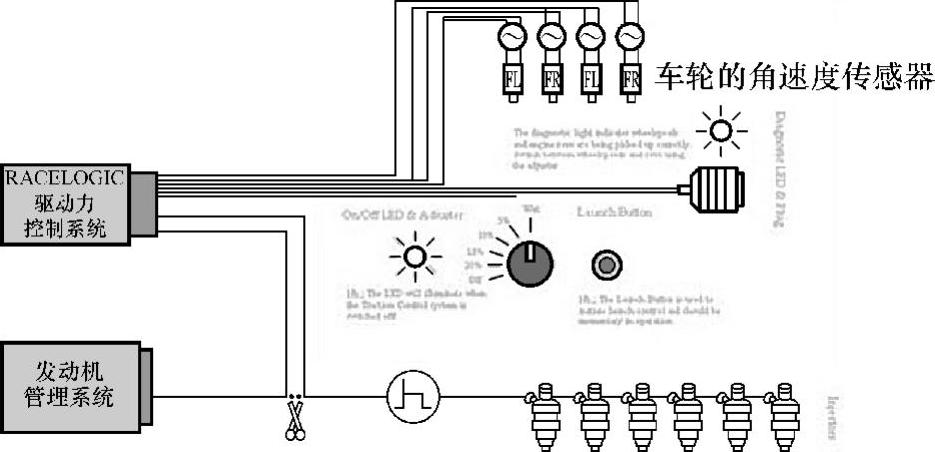
图2-46 复合RACELOGIC汽车的ATC系统【THOMAS 1998】
(注:原图中部分英文显示不清,此处仍保留,供读者参考)
横摆角速度是对汽车的行为与车轮在其垂直z轴上运动有关的行为的一个衡量,换句话说,即侧倾。
为了计算车轮的实际角速度值,测量横摆角速度是非常重要的。因为在转弯时,如果不监测车轮的侧倾,则角速度(角速率)传感器可能报告一个错误的数据,进而可能导致原本令人满意的执行机构驱动力的改变。总体上,一个ATC系统依赖三种不同种类的传感器:角速度(速率)传感器、转向角传感器和横摆角速度传感器(图2-47)。当这三种传感器综合使用的时候,它们在交付ATC系统的控制器所要求的信息上是非常有效的。
图2-48所示为一个M-M驱动轴、差速器,以及在公路/越野路面上用附着系数μH和μL提供不同驱动力水平的驱动轮(高驱动力轮和低驱动力轮)的系统动力学【CZINCZEL 1995】。
来自驱动轴的起动转矩平均分布在车轮之间。低处车轮(low wheel)在简短的车轮加速度期间通过旋转响应不完全的附着能力。对于高处车轮(high wheel),传递的加速力与在低处车轮惯性增加的加速力总和相当。当ECU获得低处车轮确定的角速度时,两个车轮上可以获得的加速力限定在低处车轮的最大加速力。这种加强车轮加速力的简单方法是为了预防低处车轮打转。
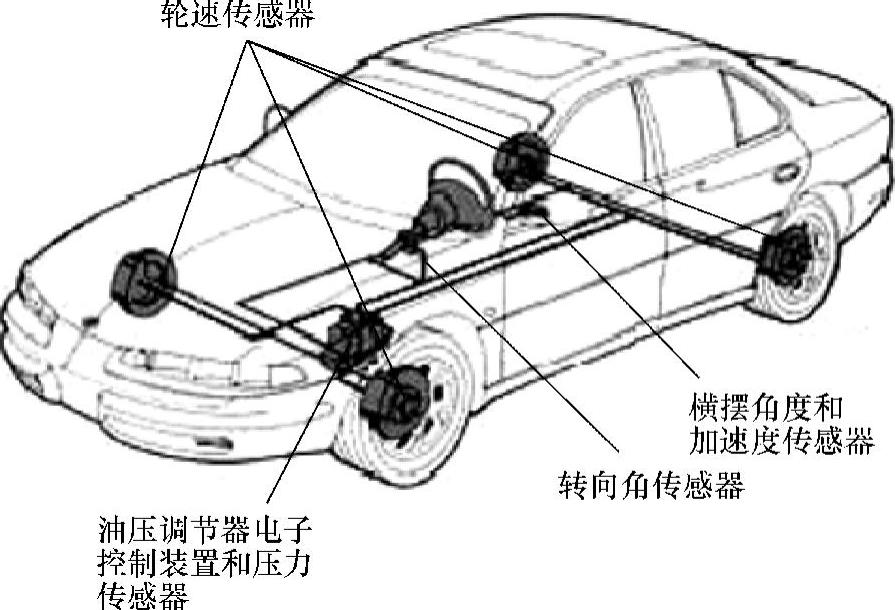
图2-47 一个驱动力控制系统的传感器的布置【MEMMER 2001】
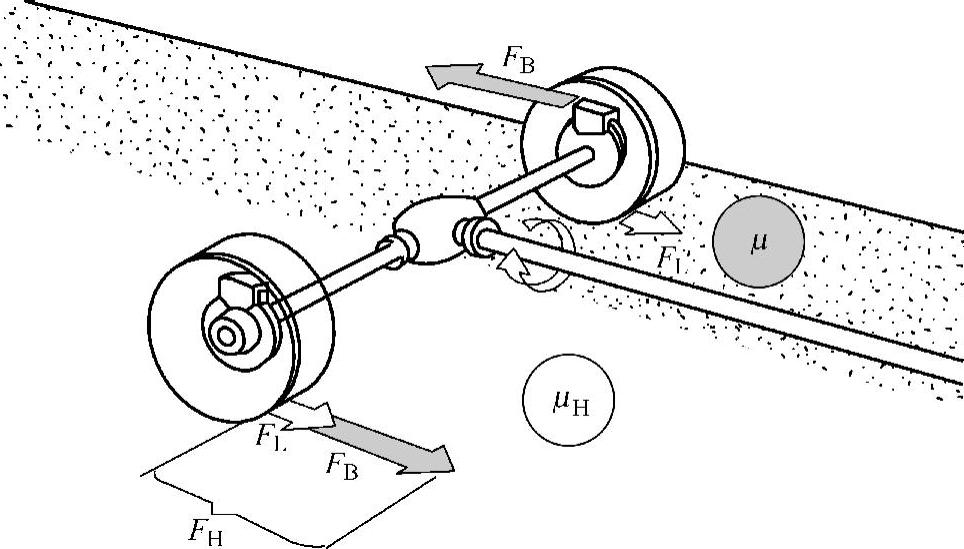
图2-48 限制M-M差速器打滑的制动控制【CZINCZEL 1995】
图2-48显示了第一种类型的车轮制动器的作用。低处车轮的制动力FB的作用阻止它打转。这引起了高处车轮可得到的辅助加速力FB∗(FB乘以有效制动半径与车轮半径的比例)。第二种最大化利用驱动力潜能的方法的特点是固定的、可变的或受控的M-M滑差(differential-slip)约束机构。这些机构给一个固定联轴器来保证驱动轮的相同滑移率。通过这种方式,允许驱动轮增加最大的加速力。在以高横向加速度转弯期间,驱动轮载荷中的横向差异发生,再次造成加速潜能的不同。制动器和限滑差速器(limited-slip)动作也与帮助保证在这种情况下的最大驱动力有关。嵌入EMC和辅助制动控制(或者受控M-M差速器)的ATC,可被同时使用来保证可靠的车辆稳定性(转向机电一体化控制)和物理限制需要的约束下的最优加速度。EMC是给公路/越野路面一致附着力的主要模式。与此同时,制动力的作用(或M-M差速器机电一体化控制)给两个驱动轮对付公路/越野路面阻止横向差异的最优的加速度。比如,用于ABS的四个车轮角速度值,为ASR ATC系统提供如下闭环机电一体化控制参数:来自横向从动轮和空转轮的车轮角速度值变化的加速度滑移;从动轮的角加速度。
如下的次级机电一体化控制参数也被计算:基于空转轮角速度值的车速和加速度;曲线识别,从空转轮角速度值的比较得来。加速度滑移的目标值定义为空转轮角速度的平均值加上一个车轮角速度差的规定值,该车轮角速度差的规定值称为滑移阈值设定点。因此调整加速度滑移的主要目标可以分为两个子目标:加速度滑移的闭环机电一体化将滑移率维持在最大精度的规定水平;不同操作条件的最优滑移设定点计算,及其作为机电一体化控制目标的实现。
取决于正在用的最终控制策略,不同的机电一体化控制概念可以用来满足第一个目标。采用TVC,从一些信号计算得来的一个设定点被采纳,一旦该闭环机电一体化控制系统开始工作,就使用该设定点进行调节。
随后的机电一体化控制过程基本上相当于积分控制器的控制过程。当使用制动时,准备工作对补偿管理制动卡钳中响应的非线性射流压力-容积曲线是必要的。因此,该闭环机电一体化控制程序的第一阶段使用一个相对大的量对应的传感脉冲,以补偿制动卡钳的顺应性。接着,系统用渐变的射流压力增长来响应正的设定点偏差;增长率对应发散度。随后的压力跌穿机电一体化控制设定点,开始一个卸压阶段(定义的卸压和保持阶段的顺序)。该脉冲序列的后面是制动控制的结束,在脉冲序列中卸压阶段的长度不断增加。点火和燃油喷射控制基本上符合微分(derivate,D)控制器闭环机电一体化控制概念。与确定满意的设定点相关的困难由这一事实造成,即最优加速度和横向力不能同时获得。因此,通过使用优先级控制策略和自适应响应模式,ASR机电一体化控制算法必须满足线性驱动力和横向附着力的不同驱动需求。车辆速度的高值伴随着较低的驱动力驱动要求,特别是低的附着系数需求。同时,在车辆稳定性和转向反应上的减少也是不可接受的。因此,该机电一体化控制策略的目的是,在车辆速度随从线性驱动力向横向附着力转变的优先级而增加时,提供渐进的低滑移阈值设定点。
汽车的加速率以及ECE/ICE输出功率的调节水平,为有关摩擦系数的可靠的结论提供了基础。因此,另一个重要的策略考虑公路/越野路面的摩擦系数。滑移阈值设定点调升来响应更高的摩擦系数值。这保证为低驱动力公路/越野路面上最优性能而设计的ASR系统不得过早干预高驱动力公路/越野路面。另外,另一个重要的机电一体化控制策略以先前提及的转弯检测为基础。该系统利用空转轮的轮角速度值的不同,作为减少滑移设定点以提升弯道上稳定性的基础。该轮角速度差异能用来计算汽车的横向加速度。一个大的差异表明一个高的横向加速度,也意味着可以认为有一个高的摩擦系数。在这种情况下,滑移设定点不应该减少,反而应该增加。各种各样的机电一体化控制干预过程或许正在为调整ICE转矩而工作:
• 在性能机电一体化控制或一个自动节气门执行机构协助下的节气门控制。
• 点火提前角调整。
• 与燃油喷射抑制集成的选择性点火断电。
• 单独的燃油喷射抑制。
车辆驱动轮的打滑一般在响应与公路/越野路面可得的摩擦系数相比过度的ICE转矩中出现。因此,ICE转矩的机电控制衰减是一个逻辑步骤。在两个驱动轮产生几乎相同的附着力这一情形中它始终是最为合适的方式。同时,如果合理的车辆稳定性需要保障,则ICE单独机电一体化控制装置的响应时间必须假定(图2-49)。
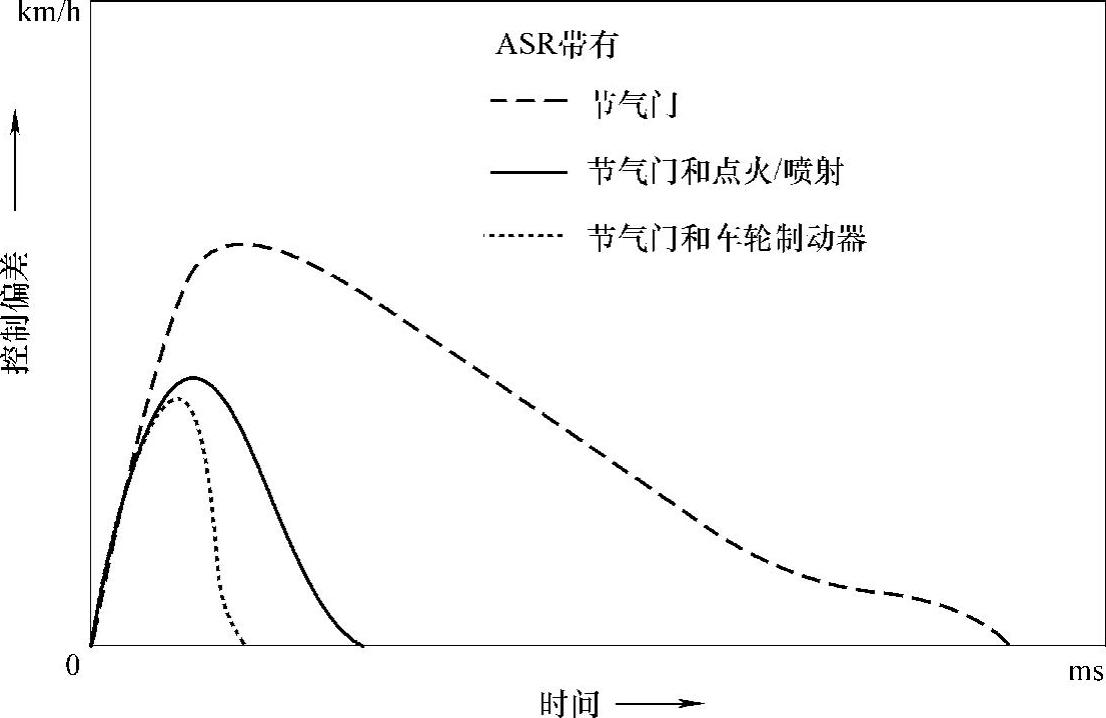
图2-49 采用不同执行机构的在第一个控制周期的受控变量的偏差【CZINCZEL 1995】
如果机电一体化控制仅单独限于节气门位置,则节气门的响应时间、进气管道内的响应延迟、ICE中的惯性力以及动力传动系统的顺应性,可能都会导致明显的持续相对长一段时间的车轮打滑。单单TMC不能保证RWD汽车上的足够的车辆稳定性。
该限制特别适用于高功率-质量比的汽车。在FWD和DBW 4WD车辆上,如果响应延迟最小化,单单TMC可能是足够有效的。把TVC与燃油喷射中断结合在一起的装置,会引起车轮滑转幅度和持续时间的实质性的减少。因此,这种概念可用来保证良好的车辆稳定性,而不管驱动轴如何。原则上,设计一个仅仅基于点火和喷射系统的机电一体化控制的ASR系统是可能的。这种概念利用一个顺序式燃油喷射的系统。该系统交替地关闭单个ICE气缸,与此同时点火也调整到机电一体化控制过程的持续时间。虽然可以使用这种概念来保证足够的车辆稳定性而不用管驱动器设置,但牺牲一定的舒适性是必要的,特别是在冰面行驶期间和热身阶段期间。另外,ABS/ASR系统也利用其他的机电一体化控制干预过程来调节制动转矩,如制动转矩控制:
• 带流体蓄能的制动转矩机电一体化控制系统。
• 无流体蓄能的制动转矩机电一体化控制系统。
驱动轮的制动器能够将大量的机械动能转换为热能(热量),至少在有限的时间内。此外,响应时间可能非常短,这使得将打滑增加限制到一个非常低的水平是可能的。
ABS/ASR系统仅仅依靠制动控制,似乎适合调节驱动轮的旋转。在公路/越野路面上起动期间和加速时的驱动力增强,给左右侧车轮提供不同水平的附着力,这些对该系统是尤其重要的。
用来产生制动力的ASR F-M装置利用已经出现在ABS中的元件。出于成本考虑,除了已经可利用的ABS组件,ASR F-M系统需要绝对最低的附加元件就显得尤为重要。根据是否使用了流体储能,F-M概念能被分为两类。包括流体蓄能的快速制动控制的一个双策略系统,总被推荐用于完全基于相对长响应时间的TVC调节装置的ICE转矩机电一体化控制。(https://www.xing528.com)
在一个带流体储能、设计用于售价较高的DBW RWD车辆的制动转矩机电一体化控制系统中,ICE转矩专门由发动机性能控制(engine performance control,EPC)装置调节。
增强的车辆稳定性调节需要快速的制动控制;快速的制动控制也确保对两个驱动轮的最优驱动力,特别是在附着力潜能的横向变化的情况下。该系统提供最佳的车辆稳定性和驱动力控制,还有高水平的舒适性【CZINCZEL 1995】。
在一个不带流体蓄能的制动转矩机电一体化控制系统中,使用的每个ASR F-M装置需要一个高压流体蓄能器,来保证能足够快地提供制动流体能。这意味着有附加成本的同时还有附加的复杂设计。
还有一个与那些广为人知的系统不同的另一个系统——专门利用ABS回流M-F泵的供应流体回路来调节驱动轮制动力。该回流M-F泵构成一个自吸流体回路的一部分,从而把ABS回流M-F泵作为一个制动的廉价流体能源。因此,这种ASR制动功能可以通过最小的附加设计复杂来实现。
无流体蓄能的制动控制的原理,已被进一步开发用于下一代ASR系统,这种系统在1993年投入生产【CZINCZEL 1995】。
此外,其他的机电一体化控制干预过程,如M-M差速器滑移调整,也可用于ABS/ASR系统来调节差速器的横向滑移量,以改善公路/越野路面上的起动驱动力和同时加速和转弯的驱动力。同时,这些控制过程从左到右提供不同水平的驱动力(滑移限制模式保持活动直至达到某个特定的车速,同时在更高的车速时暂停),即
• 在DBW RWD车辆上,ABS/ASR系统调节差速器滑移。
• 在乘用DBW 4WD车辆上,ABS/ASR系统控制后轴和中间轴差速器滑移率。
乘用DBW 4WD车辆利用一种ECE/ICE输出功率的特殊固定的前后分配,在一个稳定范围内来提供最佳的车辆特性,即有限的加速滑移量。在低附着力公路/越野路面上并伴有过度的车轮滑转时,两轴上的一个或两个车轮能响应TVC应用。在这里,中间轴滑移限制器激活来使ECE/ICE转矩的分配适应各自轴的可用驱动力,从而在改善驱动力的同时,也增强了车辆的稳定性和转向反应。
燃油喷射和点火机电一体化控制通过抑制燃油喷射过程而减少ICE输出功率。完全抑制会导致ICE输出功率的全部损失。如果采用这种完全抑制,当然不可能会获得一个平滑、渐进的响应。相反,单个ICE气缸的喷油过程的有选择性的抑制,可以用来获得快速的响应和ICE动力的渐变减少之间的一个较好妥协。这就是这种新概念背后的设计原理。
采用按照单个ICE气缸的抑制,机电一体化控制增加的数量与ICE气缸的数量相同。
由于这个有限数目的机电一体化控制阶段仍然不合适,比如,对一个四缸ICE而言,采用一种不同策略——交替喷油抑制(alternating injection suppression)。它在每两个ICE曲轴旋转之后改变一次活动ICE气缸的数目,以产生处于两个ICE气缸阶段产生的转矩之间的一个平均转矩。这种方法使得机电一体化控制阶段的数量翻倍,而获得了一个可接受的驾驶舒适性水平。与此同时,在点火提前上的补充减少能被用来提供额外的增量调整。在剩余力矩非常可观的地方,喷油抑制可以通过短时点火断电进行补充,来提供极快的ICE输出功率降低。
除了成本适中,这种系统也为车辆制造商提供如下的额外优势:节约空间(没有任何额外的空间要求),以及布线简单(有限的额外布线量)。
大体上,安装在车辆上的ABS/ASR利用两种机电一体化控制策略,实现ICE输出功率机电一体化控制和制动控制。保证行驶稳定性是RWD DBW汽车ABS/ASR最重要的任务。一个快的ICE转矩机电一体化控制系统,或者一个由TMC和快速制动机电一体化控制系统组合成的系统可以达成这个任务。
带有一个无蓄能的快速ICE转矩机电一体化控制(点火和喷油控制)和制动机电一体化控制系统的ASR系统,得到了广泛的应用。虽然可控差速锁应用也提供有效的ASR机电一体化控制,但这种系统的高成本可能阻碍了其广泛应用。
对FWD DBW汽车的ASR系统的主要需求是驱动力优化。因此,需要一种带制动转矩机电一体化控制的ASR系统。
制动转矩机电一体化控制和ICE转矩机电一体化控制系统的结合引入了一个复杂、有效的系统。
在将来,只有带制动转矩机电一体化控制装置的ASR系统会与FWD DBW车辆一起广泛使用。特别是,一个制动转矩机电一体化控制和带点火和喷油控制的ICE转矩机电一体化控制系统的整合系统会得到广泛的应用。
为什么需要换档变速器控制?
换档变速器控制(gear-shifting transmission control,GTC)增强功能估计与转矩密切相关。以一种机电一体化控制和先验预测模式处理ECE/ICE转矩的能力,使得探索避免由于不良换档质量而引起的纵向振动成为可能。
另一个涉及的因素是抖动,抖动受M-M离合器的摩擦特性的影响。因此,一个使用转矩估计和反馈机电一体化控制的鲁棒控制器受到推荐【BANSBACH 1998,HAHN AND LEE 2002】。
建议使用两类观测器:传统全状态和基于神经网络的开环型F-M执行机构观测器。观测器的目标是改善ECE转矩估计的精度。
可以使用一个变矩器(torque converter,TC)离合器打滑系统的一个非线性鲁棒测量反馈控制器。通过让锁止离合器在一种机电控制模式下滑移,李雅普诺夫(Lyaponov)控制理论使不需要的动力传动系统动力学减少。
图2-50所示为换档机电一体化控制系统的一个物理模型。模型中的一个不确定性因素是变矩器的离合器的摩擦系数【HAHN AND LEE 2002】。
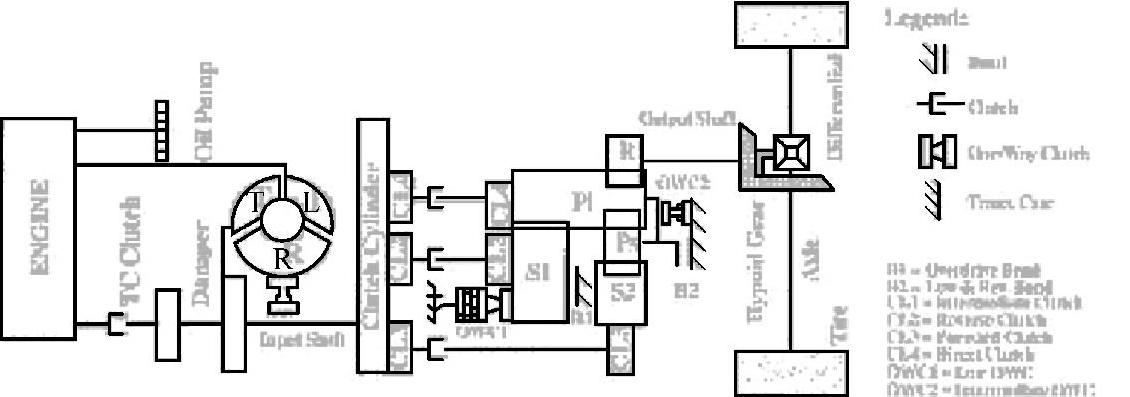
图2-50 一个后轮驱动(RWD)动力系统装置的物理模型,包括:ECE/ICE、变速器和动力传动系统。动力传动系统中包括一个驱动轴、一个准双曲面齿轮、一个差速器、两根轴和两个车轮【HWANG ET AL. 1998】
(注:此图为作者提供原图,未作改动)
其他未知的要素可能是:
• ECE/ICE转矩估计使用其稳态性能特性得到。稳态性能特性从汽车发动机制造商的图表中获得。
• 变矩器的泵轮转矩假定等于ECE/ICE转矩。
• ECE/ICE转矩是传动轴或曲轴角速度、变矩器中旋转部件的温度和流体摩擦系数的结果。
• 驱动负载转矩由以转动ECE/ICE动力学为基础的基于观测器的估计算法获得。
手动变速器(manual transmission,MT)可以通过没啮合离合器换档实现自动化【PETERSON AND NIELSEN 2002】。其目标是减少换档不可或缺的时间;换档过程也可以引起动力传动系统共振,使时间减少并提升换档质量的内部动力传动系统转矩控制,或许是解决之道。EMC ECU可以通过估计传递力矩获得。如果传递力矩为零,则在分离先前齿轮时,可引起最小化的驾驶人干扰和更快的角速度同步。现场试验已经显示:尽管换档开始有扰动和动力传动系统振动,但切换至空档很快【PETTERSSON AND NIELSEN 2000】。一个机电一体化控制方案可以用于不同的档位。
为了根除动力传动系统共振,一个观测器与一个比例积分微分(proportional integral derivate,PID)反馈结构结合使用,即:
• P:调优比例参数,这样有可能产生发动机的负峰值。
• I:调整足够低不至干扰动力学。
• D:调优至传动轴扭矩大大衰减。
可以建立动力系统装置的一个物理模型,其中控制信号传输来自ECE/ICE的转矩【PETERSON AND NIELSEN 2000】。
一个物理模型能解释分离齿轮之后传动角速度中的振动。它不能测量ECE/ICE转矩,相反,换档期间传动角速度中的振动幅度和延时就是一种表示。另外,也探讨了自动动力换档变速器(automatic power-shift transmission,APT)的1~2升档【YANG ET AL. 2001】。
自从ATP越来越常见以来,减少换档期间的振动和避免可能造成不必要磨损的超量滑移,便越来越受到关注。
两个机电一体化控制目标可能是:
• 最小化加速度和振动水平以改善行驶舒适度。
• 最小化离合器能量耗损以增强摩擦元件的耐久性。
一个动力系统装置的物理模型包括:ECE/ICE、变矩器、APT、传动轴、M-M差速器,以及两根半轴。该物理模型如图2-51所示。
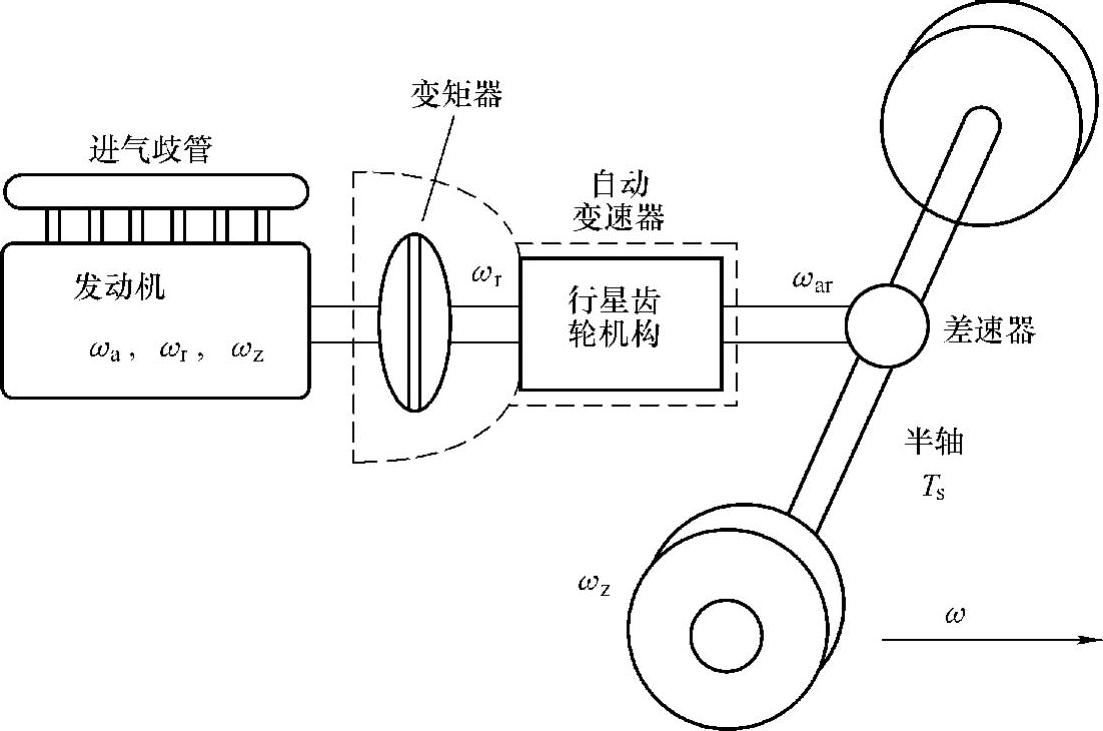
图2-51 动力系统的物理模型包括:ECE/ICE、变矩器、自动动力换档变速器(APT)、传动轴、M-M差速器和两根半轴【YANG ET AL. 2001】
该机电一体化控制系统是非常复杂和非线性的。汽车科学家和工程师可以使用集成式发动机-变速器系统的一种鲁棒换档控制策略来克服非模型动力学。有可能将建模不确定性直接纳入机电一体化控制方法中。集成化动力管理控制器(E-TMC)的控制变量是:节气门角度、点火提前和第二离合器转矩【YANG ET AL. 2001】。
该控制器可改善换档平滑度,提高离合器耐用性,相比开环型控制器要有更好的结果。用来确定改进的控制变量可以是换档时间和能量耗损。这种创新的控制器甚至在有很大不确定性的时候也可工作,同时它提供了可接受的性能水平【YANG ET AL. 2001】。
对于FAT中的离合器到离合器式换档装置来说,一个平滑的换档机电控制技术,即便没有待接合齿轮(on-way clutch),也得到了发展。
离合器到离合器式换档(clutch-to-clutch shifting)涉及两个啮合和分离的离合器。有关ECE/ICE输出转矩波动的知识至关重要。科学家和工程师提出了两种不同的检测ECE/ICE转矩的方式:一种是利用变矩器(torque converter,TC)特性和现有的角速度传感器;另一种是利用轴角速度,同时也借助现有的角速度传感器。
在到达ECE/ICE转矩目标值的时候,有可能实现一个平稳的离合器到离合器式换档。对升档和降档,以及变速器油温M-Mid 303~393K(30~120℃),这是可能的【MINOWA ET AL. 1999】。
用一个APT的模块结构的模式描述方法,包括:变矩器(TC)模块;齿轮传动链模块;AF系统模块;离合器和传动带(bands)模块【ZHANG ET AL. 2002】。
物理模型是为了模拟变速齿轮的瞬态动力学,此项研究在1~2换档、100%节气门参数和发动机转速为503rad/s(4800r/min)下执行。仿真可在分析传动带材料的动态摩擦系数以及传动带压力的影响的地方执行。ECE/ICE转矩控制和最佳离合器压力协调,是【HAN AND YI 2003】的一项研究的主题。
在ECE/ICE、行星齿轮装置、离合器和制动带(band brakes)的数学建模之后,接着是Ravigeaux型APT的动力学方程。
为了定义换档质量,可以提出四个子成本函数。这四个子成本函数基于:转矩阶段的转矩降;转矩阶段的持续时间;惯性阶段的转矩增加;惯性阶段的持续时间。也可以考虑换档期间的离合器打滑中的上冲和下冲,结果可能是一个换档质量指标。仿真显示,换档期间ECE/ICE转矩减少机电一体化控制使换档冲击减少,最适压力的应用和ECE/ICE转矩减少使换档瞬态特性提升。其他的汽车科学家和工程师对一种半自动变速器(AMT)进行了研究,并且提出了一种高换档质量的非线性滤波器【MORSEL ET AL. 2002】。
因为增强功能可依据乘客的头部摆动来度量,所以他们可能提出一个头颈部动态物理模型。提出的方案适合呆板的(dead)稳定时间与换档机构持续时间相似情况下的换档操作。AMT处于空档时的振动也可被调查【ZHENG ET AL. 2001】。
可以提出一种带显模型跟踪(explicit model following,EMF)的线性二次型调节器(linear quadratic regulator,LQR),其目标是允许系统的动态响应跟踪ICE传动轴和ICE曲轴角速度的预定轨迹。另外还提出一种动态带式制动器物理模型【FUJII ET AL. 2002】。
有了物理模型的帮助,可以预测一个4速AMT系统在不同工作条件的升档行为。也可以使用一个伺服同步器式变速器仿真的动力系统物理模型【ERCOLE ET AL. 1999】。
物理模型中可变的参数有离合器特性和减振弹簧刚度等,还可以对不同的控制策略进行测试。物理模型考虑六个通过弹簧减振系统或摩擦传动连接的刚体。弹簧模拟离合器缓冲弹簧和层刚度,同时摩擦传动模拟离合器、齿轮的同时咬合装置,以及车轮轮胎接地收缩。轴弹性被忽略。
仿真显示,只有通过同步离合器、节气门和同步啮合执行机构驱动才能达到最佳性能。对于从静止起动和加速,最优参数有所不同。
在输入信号是ECE/ICE转矩、传动轴或曲轴角速度导数、离合器滑移速度及其导数以及离合器位置导数的地方,可以提出一个模糊逻辑(FL)控制器【ER-COLE ET AL. 1999】。
控制器的输出是节气门开度导数和离合器位置导数。颤动是受离合器的摩擦特性影响的车辆中的纵向振动。
离合器接合过程受驾驶人的影响,该过程也引起这种振动。离合器中两个弹性半空间相互滑动,其中摩擦系数和相对速度之间存在一种关系。有些汽车科学家和工程师发现,自激振动可以通过离合器中的摩擦材料的选择减少甚至根除【CENT-EA ET AL. 1999】。其他人【BOSTWICK AND SZADKOWSKI,1998】研究了由离合器接合引起的自激振动。可以研究陶瓷和有机衬片(caramic and organic facings)的不同摩擦系数。
为了对实际车辆应用建模,可以提出一个物理模型,其中引入了测功器。
该物理模型可以是一个带两个凝聚惯性的二自由度(2DoF)系统。
也可以提出陶瓷材料及有机材料的物理模型。模拟结果显示这种物理模型可能是准确的。
模拟结果也显示,离合器衬片随滑动速度其摩擦系数变动率为负。这种离合器衬片会产生自激振动。
如果滑动速度越高而摩擦系数越低,则可以被解释为“负阻尼”,这是一个著名的结果【BOSTWICK AND SZADKOWSKI,1998】。
本章描述了一些重要的DBW AWD驱动机电一体化控制系统及相关应用。顾客对车辆性能的需求正变得越来越苛刻和复杂。
法律规定涉及环境问题,但顾客强烈期望:个性化;机动性质量;实用性【SCHOEGGL ET AL. 2001】。
为了满足顾客需求,建议采用一种包括经典一体化M-M动力系统的方法,该方法旨在通过将M-M动力系统视作一个整体来获得优势。
图2-52显示了M-M动力系统的部件:ECE/ICE;M-M离合器;M-M变速器;万向节(universal-joints UJ);M-M旋浆轴(传动轴);M-M差速器和后车轮。
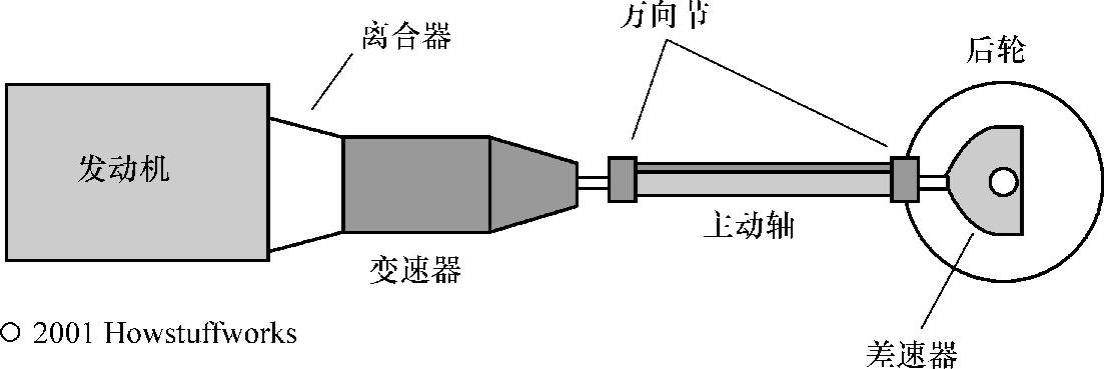
图2-52 经典整体式M-M动力系统的基本机械设计,包括:ECE/ICE;M-M离合器;M-M变速器;万向节(UJ);M-M旋浆轴(传动轴);M-M差速器和后车轮【HOWSTUFFWORKS.COM 2001】
目前的普遍共识是,M-M动力系统就是带一台ECE/ICE的M-M动力传动系统。
动力传动一体化控制(integrated powertrain control,IPC)系统,是一个将一辆车辆的M-M动力系统的全部元件视作一个集成系统中的部件进行处理的系统。这样,这种系统与将每个部件当单个元件处理的系统是相对独立的。
现代汽车中发生的涉及M-M动力系统的问题,多为shunt和喘震(shuffle)的现象。Shunt也被称为轰响(clonk或clunk),是一种高频的金属声,发生在一个齿侧间隙引起零件互相撞击的时候。喘震则是整个汽车的一种纵向振动,它由飞轮对车轮的振动引起【BIERMANN ET AL. 2000】。
当发生轰响和喘震时,车上人员的感觉就是被猛地一推,接着就是一个纵向的振动。人体能接受一些振荡,如与步行振荡符合的振动。但人体不太能接受水平振荡。
乘客会经历严重的不适,甚至会引起晕动病。因为对乘客舒适性有严重的冲击,所以汽车研发人员对轰响和喘震问题的研究有极大的兴趣【PERSSON 2004】。
车辆制造商间越来越激烈的国际竞争,导致顾客需要“极致产品”这样一种情况。有几个方面很重要,如技术开发、品牌形象、成本,还有操纵性能。
操纵性能这个术语包含了驾驶人感知的几个方面。这些感知是相当主观的反映。技术开发和品牌形象也是车辆制造商竞争的两个不同领域,但最近在技术开发方面的差别已经缩小。吸引顾客的一种方法是展现某些驾驶品质,这已变得越来越重要。
目前,一些汽车研发机构的IPC项目开始涉及机电一体化控制工程和车辆动力学。
IPC项目致力于寻找创新的和非常先进的IPC概念。这些IPC项目得以推动的原因在于,使用与现代机电一体化控制技术相结合的计算机化带来的潜能。
目标是改进操纵性能、驾驶舒适性和经济性,还有减少行车对环境的影响。通过结合建模、控制设计、仿真和实验验证可以实现。
控制M-M动力系统的这种综合方法,是一种相当新的研究轰响和喘震问题的方法。IPC项目处于决定未来要做的事情的边缘,这也是希望更新IPC国内外研究现状的一个原因。
本节内容会回顾世界各地的汽车研发机构中的重点研究领域。
汽车产品开发的目标是真实和预期的客户需求。比如,未来的客户可能坚持要更快的换档机构,减少晕动病风险,以及减少燃油消耗。这些未来的挑战大多会涉及M-M动力系统,有时候,也增加了轰响和喘震的风险。
客户最终是否购买取决于几个方面,其中操纵性能是最为重要的因素之一。另一个要考虑的是人们希望减少对环境的影响,由于目前和未来的法律规定,这已经成为一个强制性的兴趣领域。
在成熟市场中,汽车产业充当大而有力的角色。如果车辆制造商希望维持或增加其市场占有率,那么他们要在产品开发上投入很大的精力。为了留住老客户并吸引新的客户,产品必须尽可能满足客户需求。
客户对不断改善和新型号的需求,已经引起一个缩短的产品生命周期,这也成为产品开发中的另一个挑战。一款新车或车型代号的发布,只为另一种新车必须推出前赢得一个短暂的喘息时间。由于产品的生命周期较短,为了保持在汽车业中的一个竞争参与者的地位,必须提出一个新的策略。
最新一代的E-TMC已经克服了以前的关于燃油效率的缺点。精心设计的TC离合器控制【NEUFFER ET AL.1992,1995】具有自适应功能,甚至允许离合器在低速档关闭,这大大改善了燃料消耗率(SFC)。
基于驾驶人的行为,加上一种自适应换档策略,只要可能,部分E-TMC的自适应编程软件可选择一种经济甚至超级经济的换档策略。然而,通过优化动力传动系统,仍然还有更多的节约燃料的潜力。图2-53所示为这种可仿效的概念【STREIB AND LE-ONHARD 1992】。
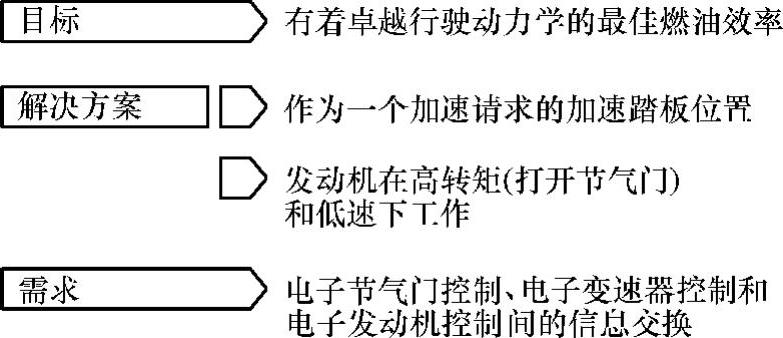
图2-53 动力传动系统优化概念的设计【STREIB AND LEONHARD 1992】
基本的想法是把加速踏板位置看作一个加速请求。该加速请求,或者请求车轮转矩,必须通过让ECE/ICE在高转矩运行进行转换,也就是说,全开节气门和低的传动轴/曲轴角速度。为了实现这个想法,有必要使用一个TVC系统。
节气门、ECE/ICE以及变速器之间的通信,如图2-54所示【STREIB AND LE-ONHARD 1992】。
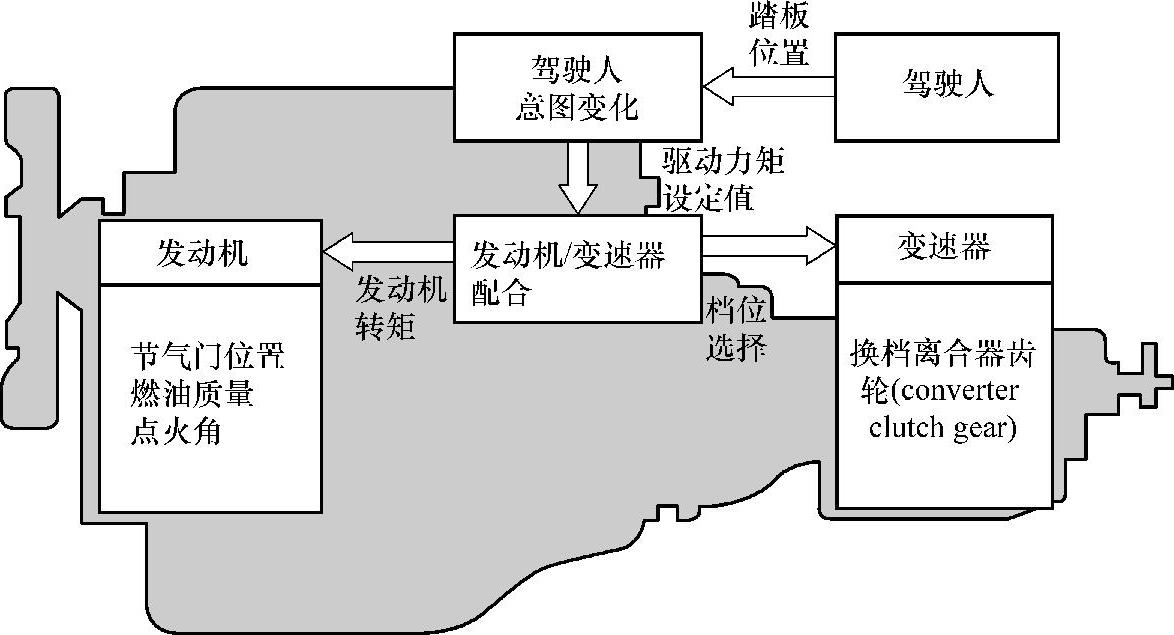
图2-54 不同机电一体化控制系统之间的逻辑结构和通信的布置图【STREIB AND LEONHARD 1992】
在这样一种系统中,ECE/ICE转矩间定义明确的协调是必要的。这种协调主要通过节气门位置(空气量)、燃油质量,以及一侧的点火角(如果有)和另一侧的包括TC离合器在内的合适的齿轮选择获得。采用这种最优示范性概念,SFC能进一步减少5%~10%(根据ECE/ICE种类)。
相比标准系统,一般说来ECE/ICE运行在较高的转矩水平,因此可能出现更多数量的换档。这对于保证最优换档控制是很重要的。
图2-55显示了通过使用由TVC提供的附加的自由度,如何实现上面想法。
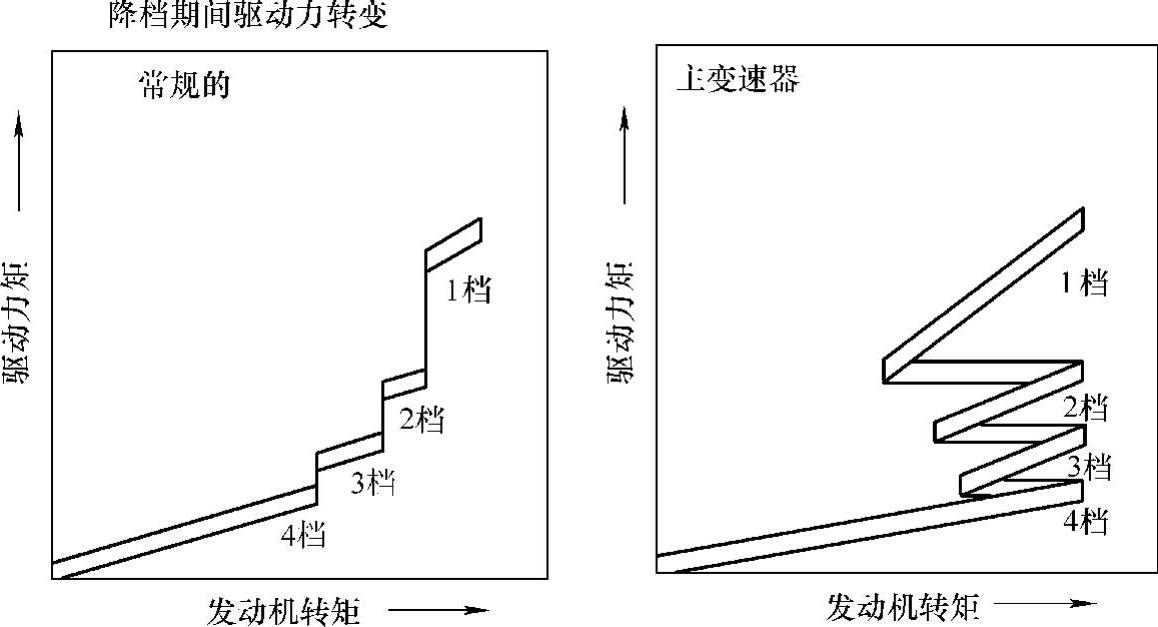
图2-55 通过换档期间节气门开度操作的持续的转矩【STREIB AND LEONHARD 1992】
以这样一种方式可以操作换档期间的节气门角度,以便在降低前后获得持续的车轮转矩。
在未来几年,研发工作可能集中在减低硬件成本、提升生产率以降低SFC、改善操纵性能上。满足电子硬件方面的成本目标的一个好的方法,是将两个或更多的单个控制模块集成到一个普通外壳中。至于机电一体化组件,一个组件可能继续使用两个独立的微控制器。这带来的好处是,两个不同系统的软件开发和应用可以单独完成,比如,ECE/ICE和变速器控制器。另一种方法可能是把E-TMC安装在变速器壳本身上。这种方法可能引起线束成本的显著减少。然而,必须要解决电子元件环境温度的恶意值(hostile values)的问题。现今的独立式执行机构可能被集成进车辆变速器中的一个普通外壳中。生产率的提升是APT设计师的主要话题之一。M-F泵和变矩器(TC)是主要的能量耗损源。一旦带连续滑动运行能力的TC离合器是可用的,生产率的重大提升就会成为可能。此时,TC离合器就能在低速档以及ECE的传动轴或ICE的曲轴低角速度上运行,而无须面对来自动力传动系统振动和/或噪声排放等问题。
操纵性能是驾驶人接纳APT的最重要特性。除了描述过的自适应功能,得益于使用FL理论的换档策略的实现,可以进一步改善操纵性能。
预测距离控制系统(preview distance control,PDC):是世界上第一个距离控制系统,于1995年首次引入。当安装在前保险杠中的激光雷达传感器检测到同一车道前方有一辆车时,该系统会控制节气门并换档,以控制车辆与前方车辆保持一个安全的距离(图2-56)。一旦两车离得太近,系统就会通过告警和警示灯警告驾驶人。

图2-56 预测距离控制(PDC)系统的总布置图【Mitsubishi】
一旦前方车辆驶离车道或提高了车速,则车辆会回到最初设定的车速【AMEMIYA 2004】。
智能高速公路巡航控制(intelligent highway cruise control,HCC)系统:通过一个坐落在前格栅内的、能在各种各样天气很好工作的毫米波雷达的装置,可测量出距前方100m和成16°角的车辆的距离。汽车行进情况可以通过一个偏航角传感器和车速传感器来探测到(图2-57)。
图2-57 智能高速公路巡航控制(HCC)系统的总布置图【Honda】
(注:此图为作者提供的原图,未作改动)
该系统比普通的巡航机电一体化控制系统更先进,同时具有视同一车道是否有车辆而维持一组车速的能力。该系统能够通过机电一体化控制提供车速或车辆间的距离【AMEMIYA 2004】。
导航-AI换档控制系统(navigation-AI gear-shifting control system):利用来自导航的弯曲线形状及汽车的倾斜度信息,可获得路况的三维估算,并且在第五档到第三档选择一个合适的档位(图2-58)。
利用导航信息,一条即将使用的弯曲线被标出,同时在接近曲线当驾驶人放开加速踏板的时候,车辆自动从第五档换至第三档,并在即使驾驶通过该弯曲线时也会保持第三档。走完弯曲线之后,该机电一体化控制结束【AMEMIYA 2004】。
图2-58 导航-AI换档的总布置图【Toyota】
(注:此图为作者提供的原图,未作改动)
用汽车中不同应用的已有机电一体化控制装置,存在许多的机会把这些ECU连接起来并建立它们之间的通信。
ATC的主要伙伴是E-TMC系统。由于车辆动力系统内的ECE/ICE与变速器结合,有必要为功能耦合和信号交换在这些ECU之间创建一个接口。
对变速器机电一体化控制里面的压力机电一体化控制,检测ECE/ICE负荷、ECE/ICE曲轴角速度和节气门位置是非常重要的。
换档期间的ECE/ICE转矩减少,对于建立换档舒适度和一个令人满意的离合器使用期也是重要的。通过向T-TMC系统发出如位置控制杆状态、锁定状态或者换档命令的某些信号,汽车的驾驶舒适性可以得到重大的改善。一个ABS和ATC的界面,对在使用车轮角速度值时变速器机电一体化控制中的一些自学习功能是有用的。
有可能将变速器机电一体化控制中的某些换档策略,实现为一种ABS和ATC的主动支持。至TC或ACC的一条链路让优化整车的某些功能成为可能。通过ECU间的接口,经通信获得的多用途使得传感器成本降低。
合适的链路特别包括:可靠通信的脉宽调制(PWM)或总线配置。总线系统尤其具有无须改变其已有硬件而连接附加ECU的优势。附加耦合只要求一个软件变更。新功能的所需附加信号的交换可以没有任何问题发生。技术文献【NEUFFER ET AL. 1995】中描述了一个E-TMC的例子。该例子通过耦合动力系统ECU来实现更低的SFC,与此同时也改进了操纵性能。
为什么需要并联混合动力传动系统机电一体化控制?
使用并联混合动力(hybrid-electric,HE)传动系统的一个主要原因,可能是得到从根本上更好的燃油经济性,而这也会引起尾气污染减少【JACOVIDES 1980;UNNEWEHR AND NASAR 1982】。
最大里程(充满电后)一直是混合动力车辆(HEV)的一个问题。要成为一个令人信服的竞争对手,就必须要提供一个与普通汽车(加满一次油)相似的最大里程【DELPRATE ET AL. 2001】。要解决该问题,需要不同的机电一体化控制方法【PAGANELLI ET AL. 2000】。
建议采用一种机电一体化控制策略,该控制策略基于燃料消耗率(SFC)标准和当量燃油流的一个瞬时最小化。同时,也建议对比指定驾驶时间表的最优解决方案设置和机电一体化控制策略【SEILER AND SCHRODER 1998】。
因为两者都使用一个瞬态最小化标准,所以这些都是正确和合适的评估【PA-GANELLI ET AL. 2000】。选择一个动力系统工作点,以便总效率损失最小化。尽管不能用于实时机电一体化控制,基于模拟退火法的全局优化仍然是一个准则。仿真结果说明,在正常的欧洲驾驶工况期间,概念车的SFC如下:
• 损失最小化机电一体化控制策略:7.0L/100km;
• 当量消耗最小化机电一体化控制策略:6.6L/100km;
• 基于模拟退火法的全局优化是6.3L/100km【PAGANELLI ET AL. 2000】。
实验中可以使用两个标准的驾驶工况:城市和城郊工况【KLEIMAIER AND SCHRÖDER 2000】。
可以提出一个用在ECE/ICE、电子机械/机械电子(E-M/M-E)电动机/发电机,以及概念车的CVT上的最优机电一体化控制向量。该最优机电一体化控制向量可在程序DIRCOL的帮助下计算得出。DIRCOL可能会在搜索最优机电一体化控制问题的一个数值解的时候有所帮助【STRYK 1994】。
计算然后使用这一最优机电一体化控制向量带来城市工况期间的燃油消耗减少。比如,使用一台TD 1.7.1的原型ICE,燃油消耗从6.1L/100km降至5.0L/100km【KLEIMAIER AND SCHRÖDER 2000】。另外,也可以使用一个与每个状态相对应的动态机电一体化控制输出的逻辑状态机【PHILLIPS ET AL. 2000】。
可以标示出可能的汽车工作状态,比如,ECE/ICE“开”(On);ECE/ICE“关”(Off)。在这些状态的可能转换中,比如,驾驶人需求变动可能是首选。
汽车DBW AWD驱动机电一体化控制系统可以负责对动力系统每个部件发出输出命令,同时动态机电一体化控制算法也可用来提供状态间的平滑转换。对控制器的模拟测试进行了介绍,但缺失了有关节约燃料的结果【PHILLIPS ET AL. 2000】。
可以提出一个基于最优机电一体化控制理论的全局优化算法【DEPART ET AL. 2001】。
概念车可以是相同的。当使用提出的算法时,比如,SFC可能是6.3L/100km,而没使用该算法时SFC为8L/100km【PAGANELLI ET AL. 2000】。
并联HE动力系统的一些优缺点包括:
• 通过选择车辆速度/转矩要求的最佳能源而优化了运行效率,ECE/ICE的性能得到了改善。
• 因为可以使用ECE/ICE标准车载M-E发电机,大多数并联HEV不需要M-E发电机来产生储能装置的电能。
• 机械能直接作用在公路/越野路面,因此它可以更有效率。
• 全尺寸ECE/ICE及变速器不产生质量或空间上的节省。
• 这种概念车不提供HEV的整体维护性方面的任何改善。串联HE动力系统的优缺点包括:
• ECE/ICE绝不怠速,从而减少了车辆废弃排放。
• ECE/ICE驱动一台M-E发电机运行在最佳性能,从而获得了更好的燃油经济性。
• 允许安装ECE和车辆零部件时的多种选择。
• 有些串联HE动力系统不需要一个M-M变速器。
• ECE/ICE被用于产生它供应给储能装置的电能,从而相比那些用在并联HE动力系统中的要小很多。
• 取决于储能装置的容量,ECE/ICE及M-M发电机可能频繁工作来保证储能装置维持在一个合适的水平。这使得ECE/ICE及M-E发电机的使用寿命减少,同时也增加了SFC。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。