



为什么要节流阀控制?发动机控制系统(EMC)的开发,显示了机电一体化系统是如何被引入的,直至全球市场销售的大多数汽车现在都实现了EMC应用【WARD AND WOODGATE,2004】。
早期的ECE/ICE通过驾驶人踩踏或松开加速踏板调节吸入空气来控制,如图2-12所示。
随后引入了电子点火;接下来,引入了闭环EMC【WARD AND WOODGATE,2004】。
后一种系统中,驾驶人依然直接控制节气门,但EMC系统调节喷油和点火正时(图2-13)。
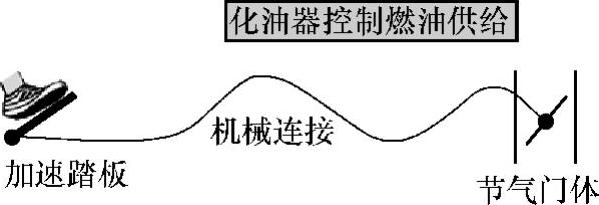
图2-12 最初的发动机控制系统(EMC)概念(简化的)【WARD AND WOODGATE,2004】
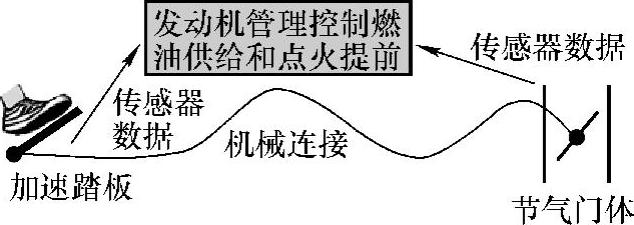
图2-13 先进的发动机管理控制(EMC)概念【WARD AND WOODGATE,2004】
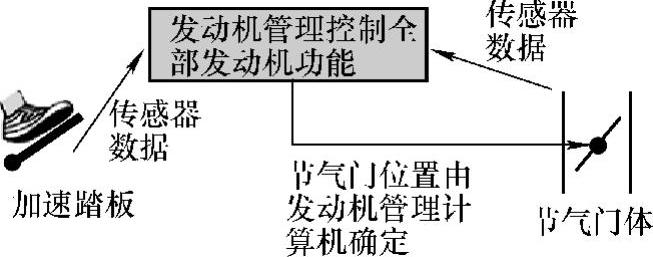
图2-14 非常先进的闭环发动机控制系统(EMC)概念【WARD AND WOODGATE,2004】
在现代的ECE/ICE中,节气门仅仅是EMC的一个输入,不存在到ECE/ICE的直接M-M连接(图2-14)。
结果,发动机控制系统已经从驾驶人用来改变ECE/ICE曲轴角速度的仪器,转变成了产生转矩的仪器,成了一个汽车“目标”。为了追求其他的车辆目标,驾驶人的命令可以被覆盖或修改。大多数的EMC系统设计成“失效保护”。如果发生了故障,该机电一体化控制系统不能恢复,则系统进入一个指定的“安全状态”,在这种状态下,通常ECE/ICE以有限功率或关机运转。失效保护设计一般集成了传感器和处理中的冗余,使得第一次故障不会让汽车无法起动。
大多数新的汽车已经更新为TVC系统。TVC系统让传统的节气门拉索和联动装置成为过去。用这些系统,实际上就是在加速踏板和燃油系统之间不再有连续的机械连接,而只是一组传感器、线束和接头。节气门拉索不能有太多的扭曲和扭结,但线束则无关紧要,且有助于减少一般的发动机舱的杂乱程度【HALVOR-SON,2004】。
机电一体化节流阀允许EMC微电脑、加速踏板和燃油喷射系统之间的一个完整的通信环。这意味着车辆能对驾驶人的右脚或运行状况中的改变,做出更快和更有效率的响应。基于驾驶人过去的驾驶习惯,它们甚至能预测驾驶人踩压加速踏板的力度,并与变速器一起工作来提供更好的性能和效率。
DBW AWD驱动机电一体化控制系统有较少的运动部件,并能更好地与振动和自然力隔离。同时,失效也是安全的:虽然节气门拉索可能磨损、折断或被绊住,但人工智能(AI)操作可以阻止节流阀永远“阻塞”打开;如果加速系统失效,则它会与车辆的诊断系统连接【HALVORSON,2004】。
TVC在DBW AWD驱动机电一体化控制系统的进步中发挥了重要作用。由于假定的约束和系统特性,节流阀位置的机电一体化控制实际上是一个错综复杂的难题。
很多车辆制造商已经实现了TVC,其优势如下【SCHOFIELD,2004】:
• 消除了一些M-M、F-M或P-M零部件。
• 可实现的优秀的精度和耐久性。
• 与不同机电一体化控制系统集成的更大自由度,如排放控制系统、车辆牵引/稳定性控制系统。
• 改善的设计灵活性:节气门不一定非要是一个加速踏板。例如,可以是一个操纵杆(侧操纵杆)控制器。
实现了一种级联的机电一体化控制结构。这种控制结构包括一个非线性轨迹发生器过滤器,它允许每个不同的机电一体化控制困境通过完全正确的机电一体化控制算法和实现技术得到阐明。有关可变结构机电一体化控制技术的应用,是寻找解决方案不可或缺的方面。
在【ROSSI ET AL. 2000】中报告的全面仿真试验显示了建议的控制算法的性能。报告中介绍了一个原型控制器,从2.5°~85.5°范围内的研究性实现。仿真结果显示了一个非常平的位置轨迹,其动态位置误差的最大值为7°。无论是从控制性能,还是从控制器成本的角度来说,设备需求绝对能被满足。比如有名的TVC系统中的一个【MCKAY ET AL. 2000】,使用最少两个加速踏板传感器电位计和两个节气门传感器电位计(图2-15)。
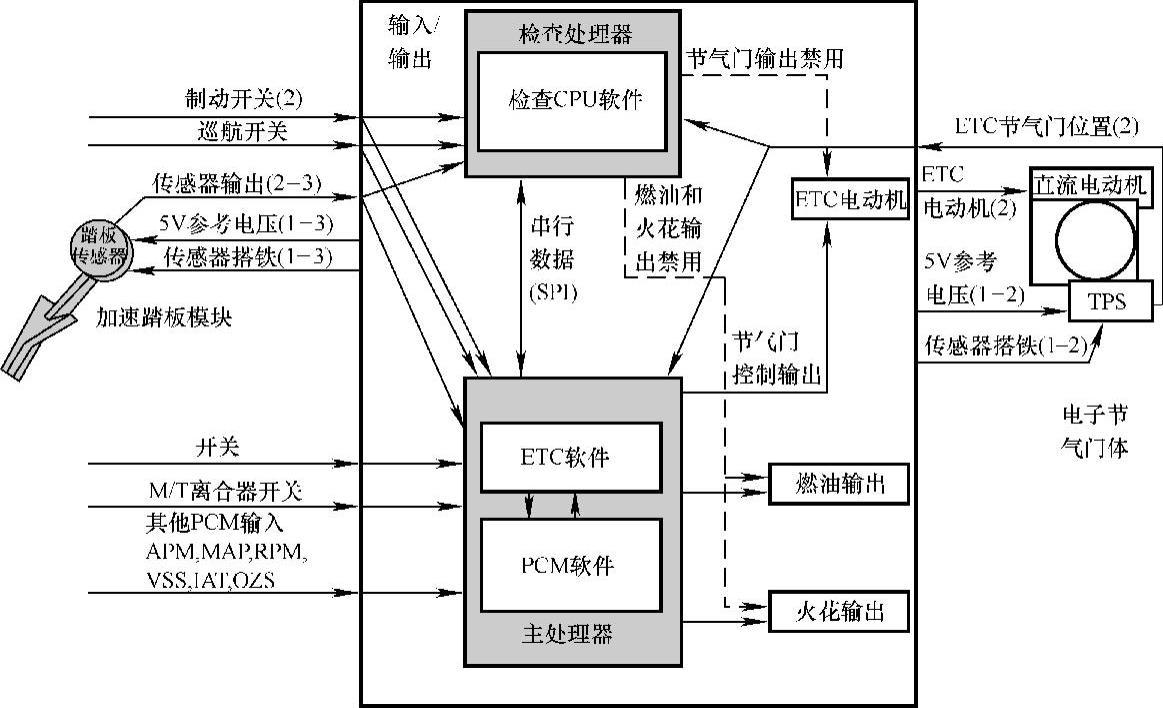
图2-15 TVC结构和功能框图【Delphi;MCKAY ET AL. 2000】
根据客户需求,可以额外增加基准电压、传感器搭铁或第三个加速踏板传感器,来提高整体加速踏板位置传感的可靠性,如图2-16所示。
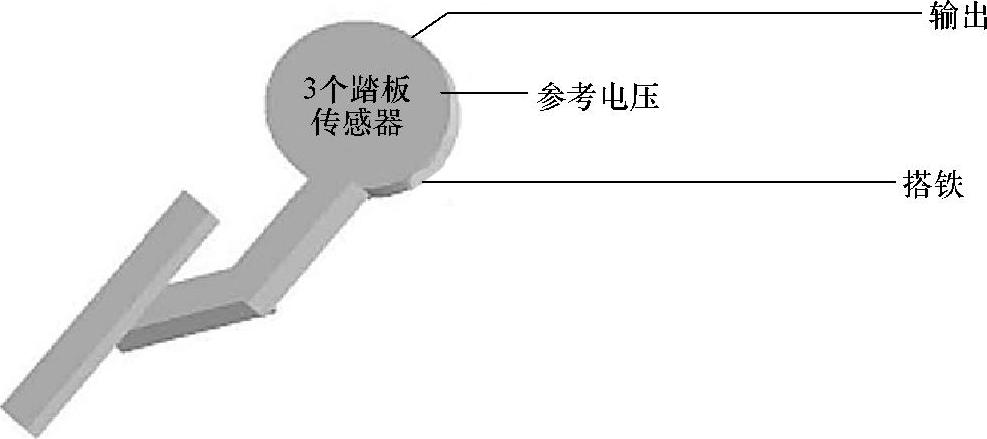
图2-16 加速踏板模块【MCKAY ET AL. 2000】
可以使用电隔离的基准电压和搭铁,以便一个单点电短路/断路不会使全部的踏板/节气门位置传感器失效。
传感器-输出特性是多样化的,使得可以使用相关合理性诊断法来改善共模故障的可检测性(图2-17和图2-18)。
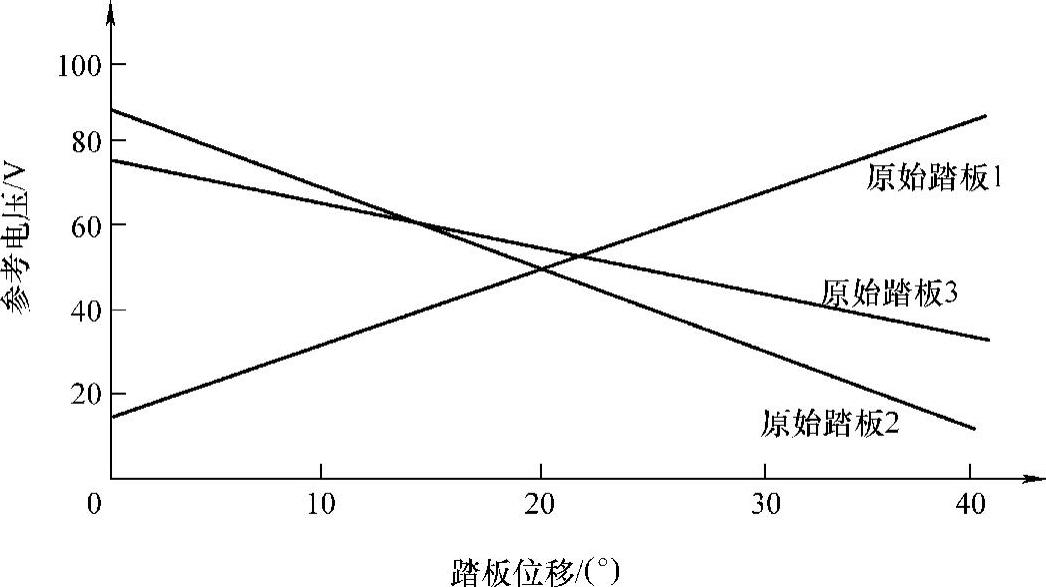
图2-17 加速踏板位置传感器特性【MCKAY ET AL. 2000】
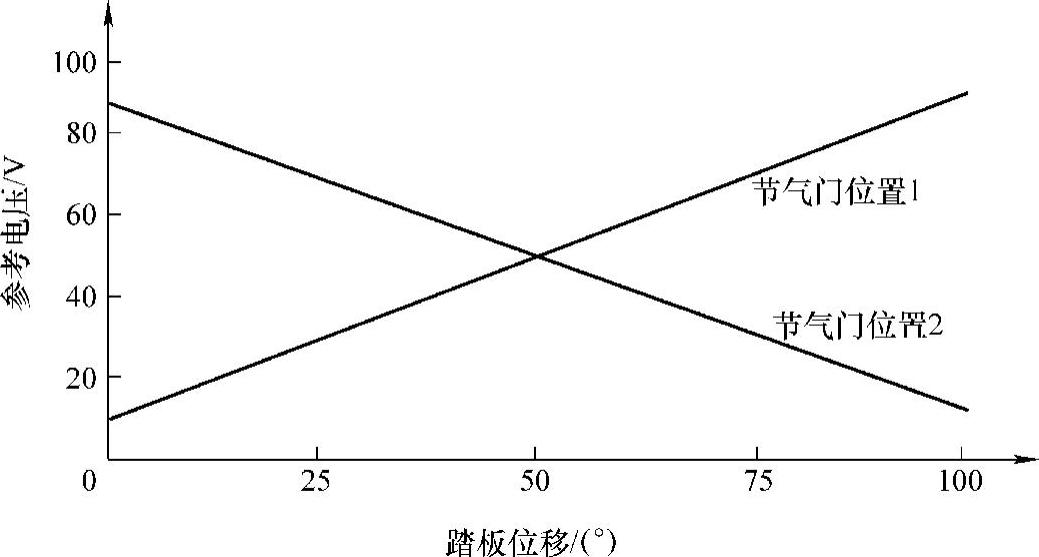
图2-18 节气门位置传感器特性【MCKAY ET AL. 2000】
TVC系统也使用逻辑上相反的冗余制动开关,一个常开一个常闭。与节气门和踏板传感器一样,制动开关冗余和多样性促进可靠的制动信号和合理性诊断。
一种基于传感器故障状态的踏板-传感器位置测定方法,用来将多个传感器信号转换成表示加速踏板位置的单个、高可靠的值【NICHOLS AND VERGERLEH-NER 1997】。
使用Giotto,基于调度运送代码的实时编程也可以用于TVC系统。Giotto是一种时间触发编程语言,它支持DBW AWD驱动机电一体化控制系统的一种嵌入式控制系统的开发。如图2-19所示【HENZINGER ET AL. 2003;KIRSCH 2003】。
Time-Safe Giotto程序具有:
• 可预测性:确定性的实时代码。
• 平台无关性:运行在分布式系统上。
• 多模式:支持模式切换。
图2-19 BMW的TVMC的Giotto(在萨尔茨堡大学继续的DARPA MoBIES项目的部分)可用于OSEKWorks RTOS,1处理器:Motorola MPC 555 40 MHz【KIRSCH 2003】
• 可组合的:支持模块化编译。
Giotto支持:
■Windows,Linux,OSEKWorks,HelyOS。
■Java。
一个汽车化学-热-流体-机械力(CH-TH-F-M)ICE的逻辑(图2-20),仍然主要由连杆机构、摇杆、触点、阀门以及齿轮等组成【HUBER AND MILLS 2000,2005】。
传统ICE的大部分质量、大部分的成本,以及全部的逻辑复杂性,都位于围绕核心处活塞和气缸的周边设备中。
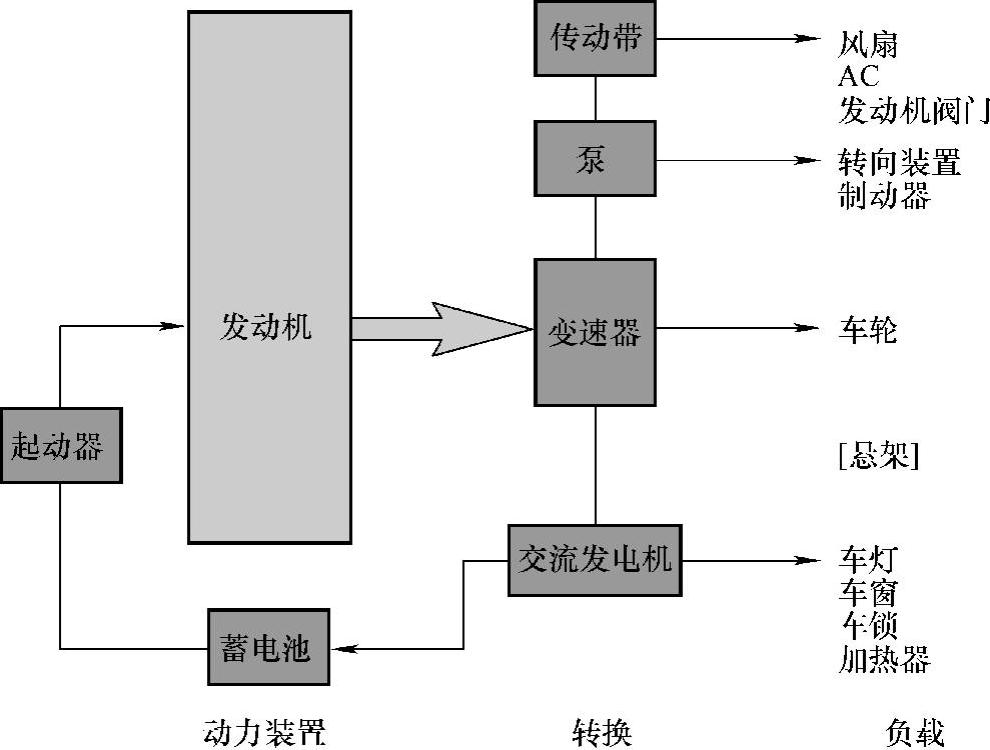
图2-20 化学-热-流体-机械力(CH-TH-F-M)发动机和机械-机械力(M-M)动力传动系统【HUBER AND MILLS 2000,2005】
车辆的机械-机械力(mechano-mechanical,M-M)动力系统正在从机械式转型到数字机电(electro-mechanical,E-M)式,其原因是:相比M-M替代件,低成本大功率宏电子(macroelectronics)和低功率微电子,现在可以更快、更精确、更可靠及在更少的空间控制大功率的部件,如图2-21所示【HUBER AND MILLS 2000,2005】。
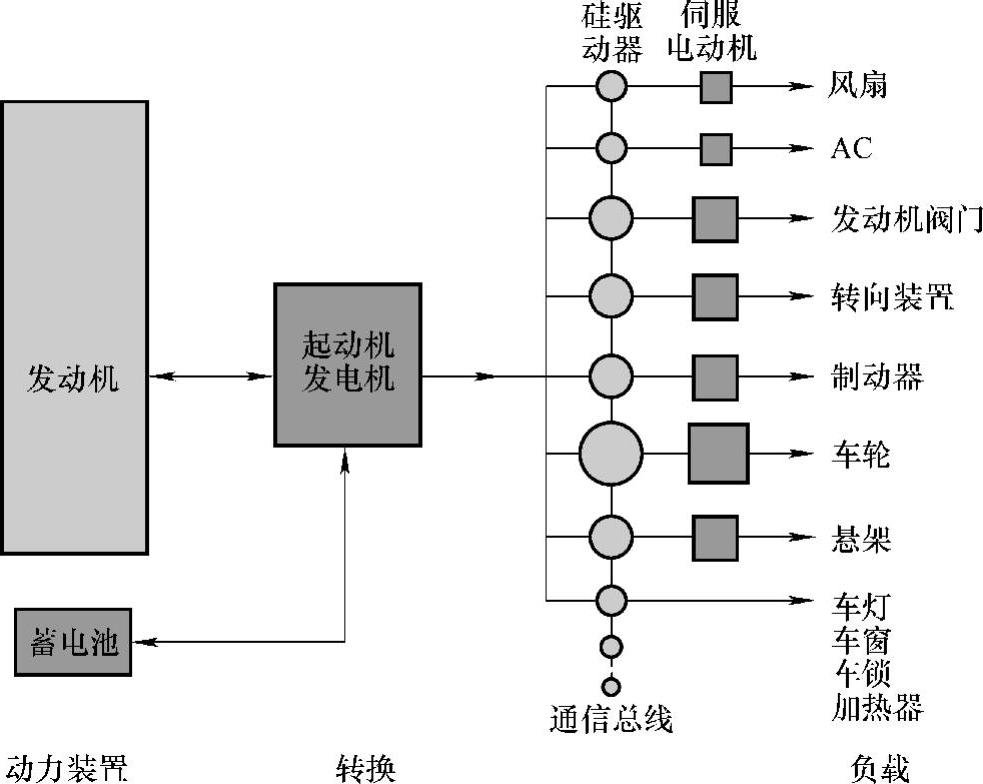
图2-21 化学-热-流体-机械-电(CH-TH-F-M-E)动力系统和电-机械力(E-M)动力传动系统【HUBER AND MILLS 2000,2005】
相比钢材,车辆制造商已经在蚀刻硅(etched silicon)和/或其他的非晶半导体宏换向器、微处理器和驱动器上花费了更多。在汽车科学家和工程师考虑未来的变速器时,他们必须进行预测:在做了创新后,半自动变速器(semi-automatic transmissions,SAT)、全自动变速器(fully-automatic transmissions,FAT)和无级变速器(continuously variable transmissions,CVT)的全球共享可能会如何改变。例如,如机电控制的多段速SAT、FAT和CVT曾有过机会为如今它们有的实际的不确定性提供解决方案。
另外,他们必须调查这个问题:全新的EMC电控单元(ECU)对现在的M-M DBW AWD驱动机电一体化控制系统是否是现实的。这种全新的EMC应该包含不复杂的自动换档,这意味着它们的生产成本更低。图2-22作为范例图解了一种传统的EMC【VW;SEIFFERT AND WALZER 1991】。
一方面,起动(start-up)和换档(gear-shift)传动M-M离合器处于ICE和手动变速器(MT)之间;另一方面,它由一个伺服机构执行器驱动,所以自动起动车辆是合理的,也就是说,无需M-M离合器踏板。
M-M DBW AWD驱动系统的灵活性和可靠性、减少的燃料消耗率(SFC)及噪声,需要数值大且级数多的变速器速比。而且,如果进一步延深这个概念,就进入了SAT/FAT/CVT的假设。
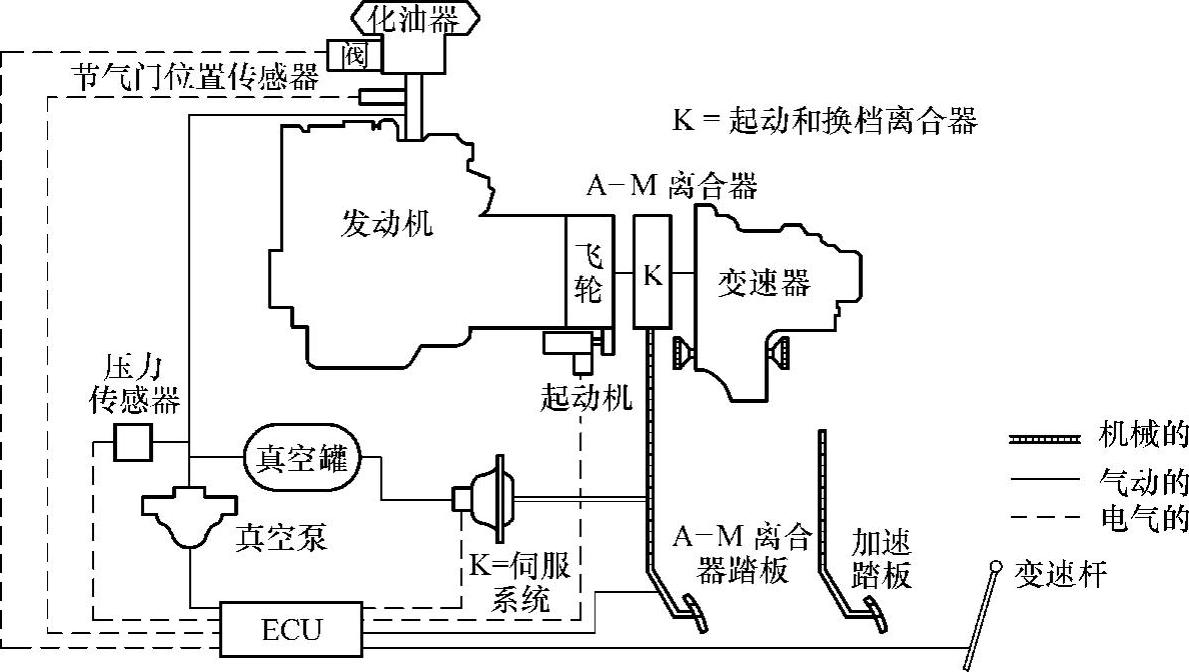
图2-22 传统的EMC【VW;SEIFFERT AND WALZER 1991】(https://www.xing528.com)
由于其从小到大的(bottom-to-top,BTT)比值范围广泛,这样一个SAT/FAT/CVT会完美地兼容所有的汽车。
针对低燃料消耗率(SFC)潜在的局限性,出现了各种分类的起停(start-stop,SS)EMC。其中几个系统只是在车辆停止时工作,其他系统则在汽车运动中正常工作。
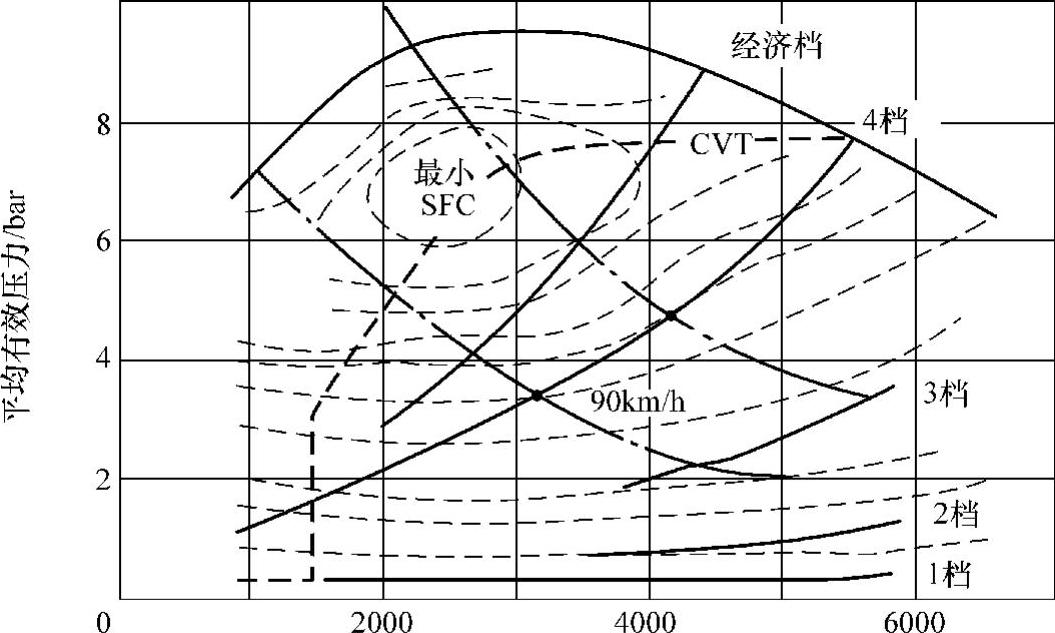
ICE性能曲线图(图2-23)显示的是输入流有效气压的一个平均值。该输入流有效气压与相对ICE曲轴转速的ICE曲轴转矩成正比。
发动机转速/(r/min)
图2-23 内燃机(ICE)性能曲线显示滚动阻力、恒功率和SFC的曲线;粗实线:五档MT;粗虚线:CVT;粗点画线:恒功率;细虚线:CVT【VW;SEIFFERT AND WALZER 1991】
前四档的恒定、水平驱动的滚动阻力曲线说明,车辆的功能点一般是远离最佳ICE效率附近的。最佳ICE效率作为一个被标为最低燃油消耗率(min BSFC)的环礁(atoll)而暴露在ICE性能曲线的左边。
换句话说,在ICE曲轴转矩为一个高值和ICE曲轴转速为低值,ICE能最经济地产生一个给定值的ICE曲轴输出功率。凭借补充的“长的”(long)传动比,可以了解这些最高的ICE功能点。比如,通过所谓的E-MT(E代表经济),或借助SAT/FAT/CVT,SAT/FAT/CVT允许ECE/ICE在最佳ICE功能点车速自主运转。
通过一个SS EMC ECU可以建立另一个减少SFC的方法。在ECE/ICE曲轴输出功率非不可或缺时,SS EMC ECU专门关掉ECE/ICE。这防止了ECE/ICE空转,从而也就防止了与之相关的不利的SFC和尾气排放情况。
图2-24所示为一种可能的起动-停止(SS)EMC结构【VW;SEIFFERT AND WALZER 1991】。
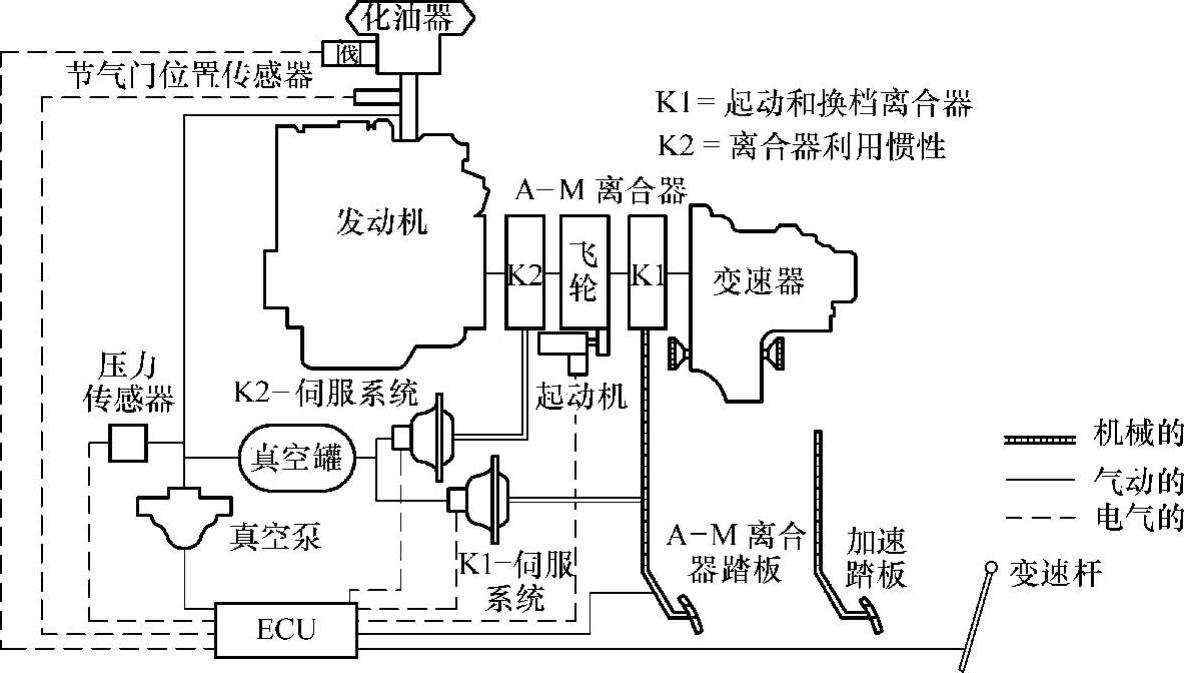
图2-24 使用惯性的(SS)EMC【VW;SEIFFERT AND WALZER 1991】
起动和换档传动M-M离合器是普通的M-M离合器,一方面,它处于ICE和手动变速器(MT)之间;另一方面,它由一个伺服机构驱动,所以自动起动车辆是合理的,也就是说,无需M-M离合器踏板。
利用惯性的M-M离合器是一个辅助的M-M离合器,它使飞轮从ICE曲轴分离。
另一个伺服机构执行器也驱动该M-M离合器,如果驾驶人松开加速踏板,两个M-M离合器同时被释放,与此同时供给ICE的矿物燃料被切断,没有了飞轮质量,ICE立即停止。
另一方面,飞轮保持旋转,一旦驾驶人再次踩下加速踏板,还在旋转的飞轮与ICE曲轴分离,飞轮的机械动能启动ICE,期间不会排放污染物。
一旦ICE已启动,该伺服机构执行器通过传动M-M离合器建立一个与汽车的交互;该过程进行得非常精确,以至于驾驶人和乘客不会感觉到任何的颠簸。
汽车停住后,汽车起动以类似的方式实现。如果飞轮中储存的旋转机械能不够启动ICE,一个E-M电动机可以引起该飞轮旋转至角速度。
该E-M电动机功率能比目前的起动E-M电动机低得多,因为它不会严重影响ICE的压缩。
SS EMC在起动、照明和点火(starting、lighting and ignition,SLI)CH-E/E-CH蓄电池电量很低的时候保证ICE运转,同样的情形包括:伺服机构执行器的真空度不够;下山后需要ICE。
在欧洲城市汽车行驶工况的试验表明:采用这种SS EMC,可以节油约20%;在合理的驾驶情况下,能节油30%。
SS EMC的劣势在于:机械装置的实质复杂性和机电一体化控制的复杂性。
考虑到目前矿物燃料的成本,这种机电一体化控制系统的成本效率并不明显。
另一方面,这个基础为快速设计提供了足够的机会,使得SS EMC可能对大制造具有吸引力。
总之,术语“DBW AWD”指的是用机电一体化控制系统更换车辆的M-M、F-M和/或P-M子系统。
应用DBW AWD驱动机电一体化控制系统的子系统另一个典型的例子是TC。
用一个微处理器控制的DBW AWD驱动机电一体化控制系统实现驾驶人与子系统的接口,可以使质量更小,设计更灵活,制造更简单,可靠性也更高。
TVC在节流阀和加速踏板之间用一个电气连接来代替传统的缆线。相比传统的节气门系统,它效率更高,安全性也更好,如电子稳定和驱动力控制系统。
汽车制造商都在豪华车上引入了TVC,把它作为同步两个EMC微型计算机的一种有效的方式。当CPU性能不佳时,若全部12缸都要燃烧,则两个微型计算机是必要的。
这些年来,机电一体化节流阀已逐步分阶段在更昂贵的豪华车型上得到应用,在过去的几年中,它们也被引入了主流和经济型汽车中。
为什么需要可变阀门正时控制(VVC)?
一种基于吸气和排气阀门两者全可变阀门正时控制(variable valve-timing,VVC)的非节气门ICE转矩机电一体化系统控制的开发,可以用在EMC系统中。应用VVC的主要好处有【UNIVERSITA′DI BOLOGNA 2004】:
• 在部分和低ICE负荷下SFC的显著减少。
• 利用可变气门重叠的内部废气机电一体化控制。
在图2-25显示了SFC减少百分比与ICE曲轴角速度(发动机转速)变化百分比和负载变化百分比的关系【UNIVERSITA′DI BOLOGNA 2004】。
图2-26显示了相对ICE负荷率,在ICE曲轴角速度为524rad/s(5000r/min)时,用角度表示的最佳进气和排气阀门正时角位置【UNIVERSITA′DI BOLOGNA 2004】。
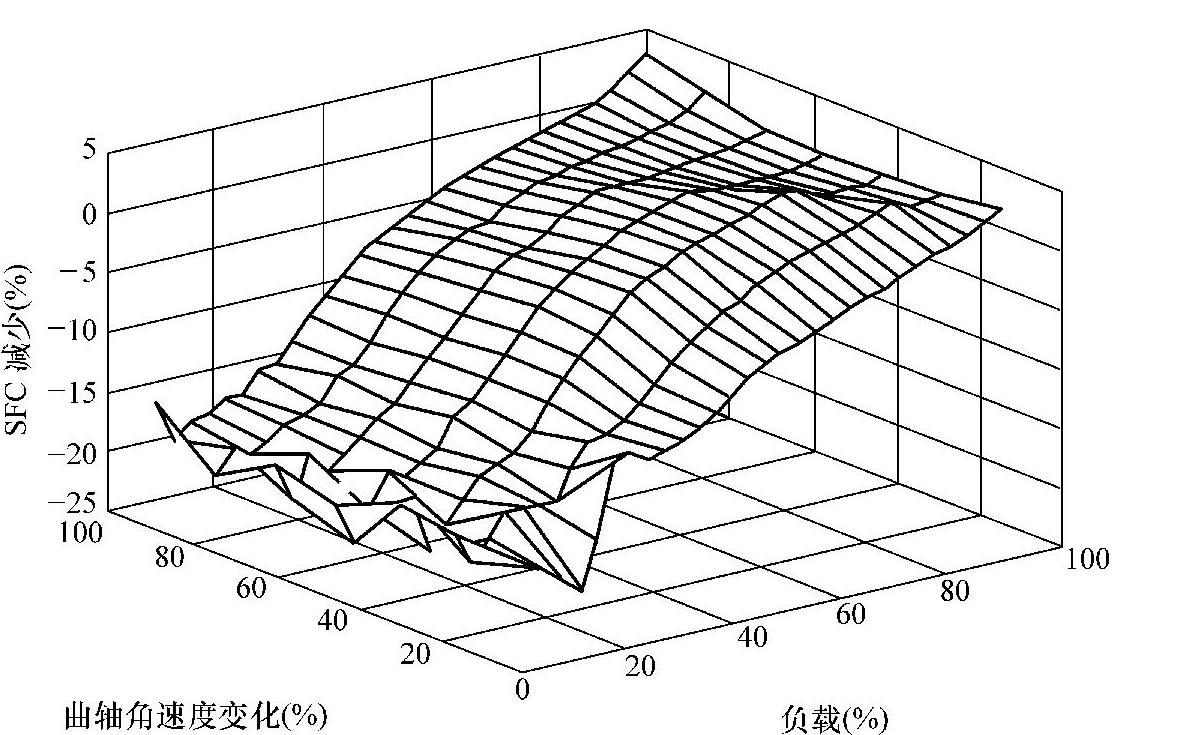
图2-25 SFC减少百分比与ICE的曲轴角速度百分比和负载百分比的关系【MagnetiMarelli】
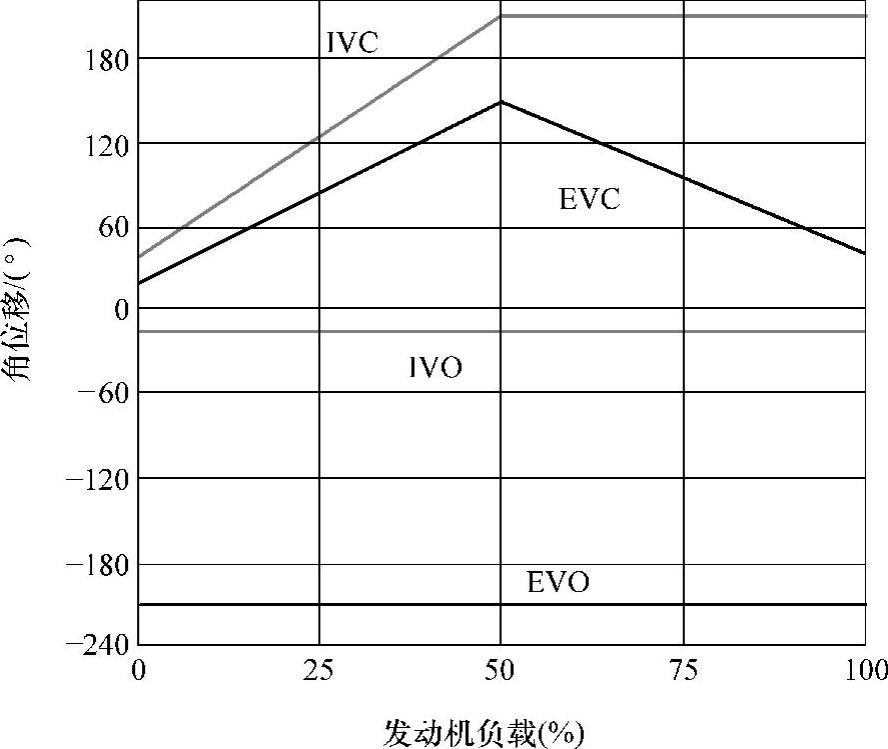
图2-26 ICE负荷率与最佳进气和排气阀门正时角位移的关系【MagnetiMarelli】
图2-27中示出了各种ICE负载机电一体化控制系统的ICE效率趋势【UNI-VERSITA′DI BOLOGNA 2004】。这些系统也被称为EMC系统。
基于吸气和排气阀门两者全可变阀门正时控制(VVC)的非节气门ICE转矩机电一体化控制实际是一种空燃比(air-fuel-ratio,AFR)机电一体化控制。它是EMC系统设计中众所周知的问题之一【CHANG ET AL. 1995,JONES ET AL. 1995,POWELL ET AL. 1998,KING AND GRIZZLE 1999,MIANZO AND PENG 1999,MIANZO ET AL. 2001】。
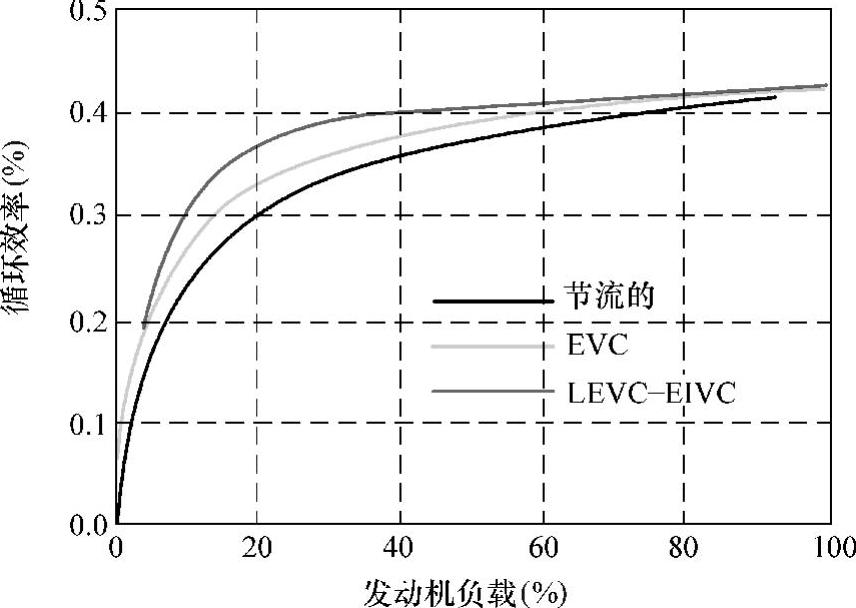
图2-27 不同种类ECM系统的ICE循环效率
它也是最关键的排放控制系统之一。比如,美国联邦排放标准对某些废气成分的排放率做了严格的限制。这些标准反过来刺激了汽车工业实现排放性能更优的机电一体化控制技术。
应用三元催化(three-way-catalytic,TWC)转化器,在一个窄带内将ICE的有害排放同步高效地转化为危害更小的物质。在此装置中,AFR机电一体化控制的主要目标可以表述为:调节空燃比至化学计量法(stoichiometry),以实现TWC的性能最优。
在大部分空燃比控制器产品中,前馈控制是该机电一体化控制结构的一个重要部分。其原因是,系统中存在的纯延迟对系统的带宽施加了一个限制,从而限制了系统的瞬时响应。
在生产系统中,使用一个测量或估计的进气量并供应一定比例的燃油来获得期望的化学计量的空气燃油比,这是很常见的。
DBW AWD驱动机电一体化控制系统中的AFR机电一体化控制,提出了额外的挑战和机会【MIANZO ET AL. 2001】。
DBW驱动是一个术语,该术语常常用来描述那种没有从驾驶人至节气门的机械联动装置,从而也不直接控制进入气缸的进气量的EMC系统。
在这种情况下,动力系统机电一体化控制计算机解析来自驾驶人的踏板输入,并计算驾驶人的要求,典型的是根据驾驶人要求的转矩、进气或加速度进行解析。
计算机接下来安排进入ICE气缸的进气量,从而完成驾驶人的要求。一般的做法是,使用加速踏板和要求变量之间的一个非线性静态映射(如转矩或进气)。
这里所使用的映射在汽车的开发阶段由专家校准形成,并被认为是可用的。DBW应用的案例是节气门控制系统和可变阀门正时ICE。在可变阀门正时ICE中,进入ICE气缸的进气由阀门正时机电一体化系统控制,而不是通过节流阀控制【MIANZO ET AL. 2001】。
DBW AWD驱动机电一体化控制系统的主要优点之一,是平稳地调度驾驶人可能出现的瞬时踏板输入不足。
在需求图的后面可以插入一个4感应(four-induction)事件延迟。从实用的角度,该延迟(在1500r/min为40ms;在3500r/min大约为17ms)牺牲一个改进AFR控制的加速性能中的极细微的退化。该延迟允许在可能是“将来的”进气要求请求上使用一种“前瞻”(lookahead)或预测机电一体化控制方法。在这种预测机电一体化控制中,当前进气量估计或测量值会被用于当前的采样。
本章,一种H∞预测控制算法可以用来预测这种“将来的”(future)信息【MIANZO ET AL. 2001】。
预测可用来改进因动力系统中的任何延迟而产生的限制性的性能。反馈可用来提供对建模错误和干扰的鲁棒性。该H∞预测机电一体化控制结构如图2-28所示。
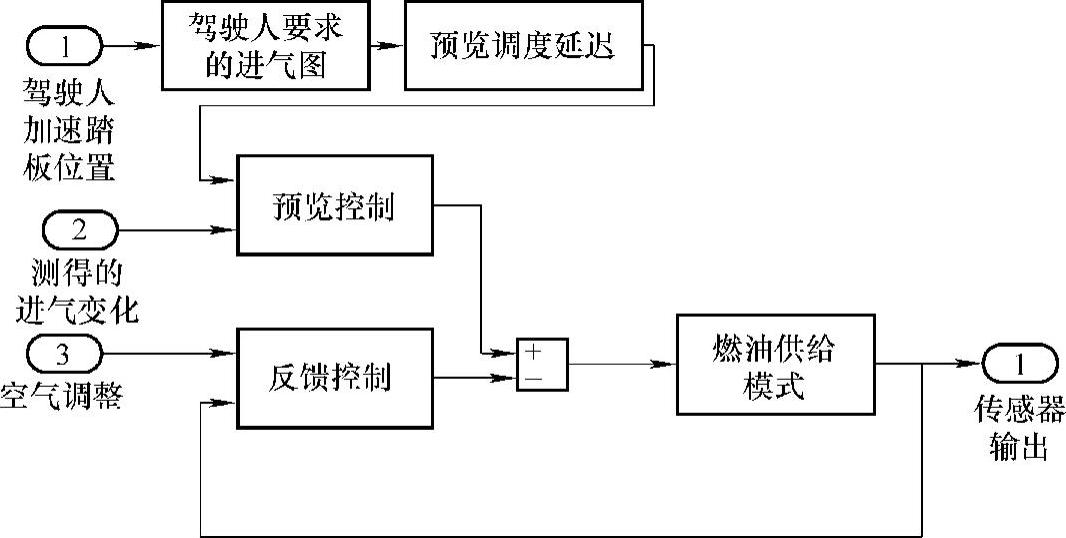
图2-28 瞬时空燃比(AFR)H∞预测控制结构【MINAZO ET AL. 2001】
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。