



串联型混合动力DBW 4WD驱动机电一体化控制系统的优势之一,可能是为高效率恒定往复速度、动力操作和最小排放而专门设计和使用的一种的ICE的新颖形式。其他长期的选项包括未来氢燃料动力ICE和燃料电池,它有着几乎零排放车辆(zero emission vehicles,ZEV)的前景。
使用带DC-AC/AC-DC宏换向器电磁激励轮毂电机/发电机的SM&GW的DBW 4WD驱动机电一体化控制系统可消除车轴和传动轴的必要性,还可让每个独立弹簧SM&GW有一个独立悬架(图1-54)【FIJALKOWSKI 1997】。
旋转壳体以一个轮毂形式制造,其目的是安装汽车市场上的标准轮毂尺寸。
DC-AC宏换向器电磁激励轮毂电动机的传动装置提供完全自由的智能车设计。
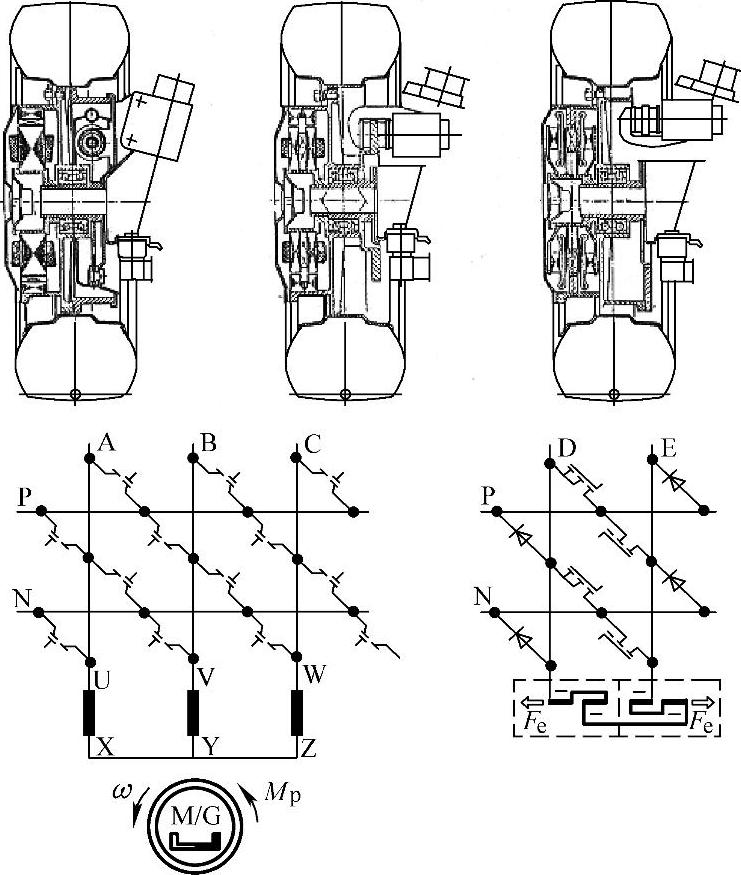
图1-54 三种不同独立弹簧、行星无齿轮、带旋转DC-AC/AC-DC宏换向器(无绕阻外转子和绕性内定子)轮毂E-M/M-E电机/发电机和管型直线DC-DC宏换向器鼓式、蝶式或环式制动器E-M电机的SM&GW的主要布局【FIJALKOWSKI 1997】
虽然混合动力DBW 4WD智能车的基本原理与几乎各类智能车的原理相同,但实际的布置有所不同。例如,有些可能有要么是FWD要么是RWD的2WD,而另一些则是4WD的。
另一个对混合动力DBW 4WD驱动的需要来自这一事实,当智能车转弯时,外SM&GW必须比以更小圆半径旋转的内SM&GW滚得更快,然而轮速的平均值、Fi-jalkowski发动机(Fijalkowski en-gine,FE)的往复活塞速度及车辆平移速度可能要求保持恒定。
就牵引效果而言,FWD好于RWD,特别是在特殊地形上,如冰或雪地。
这部分是因为在前SM&GW上的ICE的质量使得它们抓公路/越野路面更好些,这也适用于后置发动机智能车。
然而,该优势主要由推力这一事实获得,也就是说,牵引力总是沿前SM&GW转向的线路传递。
另一个因素是前SM&GW易于从坑和凹槽中爬出,而后SM&GW常常把前空转轮推得更深。而且在一些情况下,未必是朝它们被转向的方向。
全时SBW 4WS×ABW 4WA×DBW 4WD×BBW 4WB智能车的使用可能在未来快速增长。这是由于对更高性能和动力的智能车需求的不断增加。
众所周知,全时DBW 4WD和/或SBW 4WS智能车的前及后SM&GW之间的总牵引力(推力)和滑动的分布对操作效率有相当大的影响。(https://www.xing528.com)
在轮速理论值(无滑移或打滑发生时的轮速)的差异以及前和后SM&GW之间协作概念通常影响总牵引力和滑动分布。
分析和试验表明,能提供前和后SM&GW间总牵引力和滑动最佳分布的新概念无轮轴FWD和RWD以及CWD F-M差速器的开发有着重要意义。
通常,如图1-55所示的FWD和RWD以及CWD E-M差速器设计中,也就是FE和/或CH-E/E-CH蓄电池功率输出的电源及FWD和RWD部件之间插入了一个串联电气连接(布线)【FIJALKOWSKI 1997】。
串联电气连接的作用是把电源的驱动电能传送至前和/或后SM&GW。
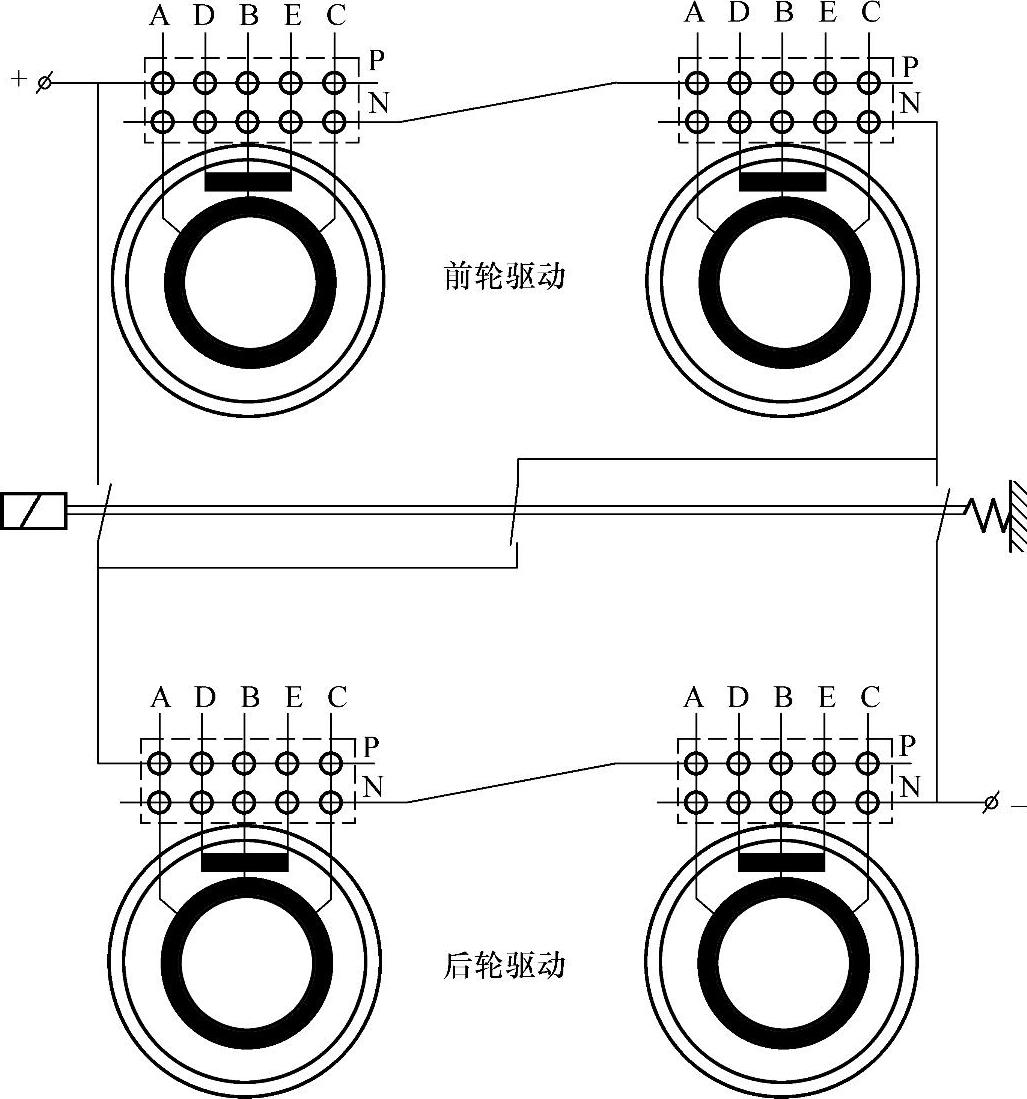
图1-55 带转矩比例FWD和RWD以及CWD E-M差速器的混合动力全时DBW 4WD驱动和BBW 4WB制动机电一体化控制系统的基本电线接头【FIJALKOWSKI 1997】
串联电气连接中的CWD E-M差速器也是将驱动在前SM&GW和后SM&GW间平等分配所必需的,同时它也允许这个事实,即当智能车成圆圈行驶时,前SM&GW的轮速的平均值不同于后SM&GW的值,因此两个FWD和RWD装置的轮速值也必须不同。
其他因素还包括车轮的不同滚动半径,原因有制造公差、不同磨损度或不同的胎压等。
通常,为锁住该CWD E-M差速器使之不工作而预先采取措施,以改进智能车行驶在湿滑路面时的牵引性能和可靠性。
对于主要用于在软土地面工作的智能车,CWD E-M差速器可以从驱动E-M动力线中去掉,但一些分离4WD的方法只留下一对SM&GW来做驱动。这种方式通常用在智能车需要在碎石路面行驶的时候。
从阿克曼的2WS SBW转向机电一体化控制系统的原理可知,相比不可调后SM&GW,前SM&GW总是容易滚动更远。因为前SM&GW的转动半径总是大些,所以在电能源(electrical energy source,EES)与FWD和RWD装置之间可插入一根并联电气连接(布线),同时CWD E-M差速器可从驱动E-M动力线中去掉(图1-55)。
实际上,这通常表现为两个单独的FWD和RWD装置、每个前或后SM&GW上单独一个的形式。在FWD和RWD装置上有可被H&TD锁定的旋转装置,但他们必须停车并下来去做。
一旦H&TD再次将其智能车行驶在监视路面上,他/她必须记得去解锁FWD和RWD装置。另一方面,后SM&GW失去牵引力,从而容易比前SM&GW旋转更远些。驱动可自动转移至前SM&GW,虽然它们处于惯性滑行模式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。