



在振动控制中,基于ASIC NF PID控制器的ABW 4WA悬架机电一体化控制系统的ECU会首先从传感器获得五个系统状态变量。接下来,公路/越野路面状况、是平滑还是粗糙,可以通过相对垂直速度的统计操作判断得出,以选择控制增益。
从这些数据可计算控制量,并且可以确定阻尼力电流变(electro-rheological,ER)射流阀的控制直流(DC)电压。而且,由于其他SM&GW移动造成的振动可以基于根据其模式和全部SM&GW系统状态变量而选择的增益来补偿。ER流体悬架的智能车可实现振动控制。位置US声呐或线性电位计或电磁传感器,加上可变阻尼ERF减振器,可以读取公路/越野路面信息。ERF汽车高科技的基石已经是ER射流阀和合成ERF减振器。在ER射流阀中,ERF被泵入一个通道电容器,在那容壁间的直流(DC)电压差可被改变,以调节油液流阻至该油液凝固和流动停止的点【JORDAN AND SHAW 1989】。
图1-53显示了一个带ERF减振器和ER射流阀的基于力控的预测性和自适应、半主动ABW 4WA悬架机电一体化控制系统的一个原理图【FIJALKOWSKI 1999】。
利用电场依赖刚度的特性,可变阻尼ERF减振器获得一个几乎无限的阻尼响应范围。
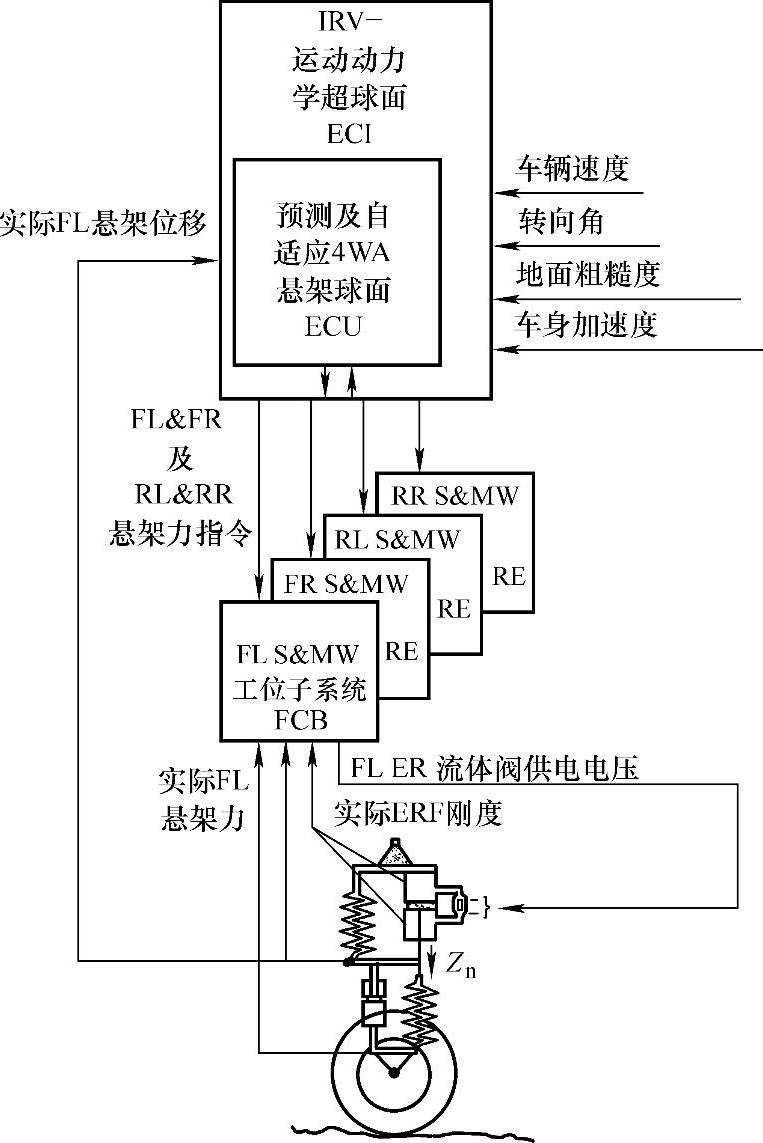
图1-53 一个带ERF减振器、ER射流阀的全时基于力控预测性和自适应、半主动ABW 4WA悬架机电一体化控制系统的主要布局及其硬件(ECI-电子控制仪;ECU-电子控制单元;ECB-电子控制位)【FIJALKOWSKI 1999】
在考虑有关的毫秒响应时间以及预料公路/越野路面粗糙度的位置US声呐中令人激动的汽车高技术时,很容易理解是什么激励汽车行业中的竞争者抢先提供一个控制稳定性、行驶舒适性、姿态以及车高的超平滑、AI ASIC计算机或晶片机控制的预测性和自适应、半主动ABW 4WA悬架机电一体化控制系统。
一个基于ASIC NF PID控制器的车载ABW 4WA悬架机电一体化控制系统的ECU,尽管存在扰动和非线性特征,但可以负责获得控制的力。
这种力伺服方法可帮助车载RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的ECI的设计,但也可能还有SM&GW的DBW 4WD驱动机电一体化控制系统的ECU只被用于一些本地稳定的系统,然而车载RBW或XBW一体式机电一体化控制超系统的ECI可直接把控制信号输入ER射流阀中。(https://www.xing528.com)
通常,大量的传感器、四个ER射流阀以及一辆智能车的很多的机械自由度,会造成一个苛刻的多变量控制问题——所有运动相互作用,控制设计也必须考虑流体的非线性特征。
在姿势控制中,悬架顶部和底部之间的无功实际(测量的)位移可能与通过反馈控制获得的目标位移一致。
此外,对于由操控引起的横摆角的直接减少,会执行:基于由转向角的横摆角估计的前馈控制装置;基于ABW 4WA悬架机电一体化控制系统的由于横向加速度引起的电场依赖刚度变化的横摆角补偿。侧倾和俯仰方向的姿态控制装置减少低频震动。
一辆全时SBW 4WS×ABW 4WA×DBW 4WD×BBW 4WB智能车的水平(纵向和横向)方向的加速度可以被加速度传感器【YAMAKADA AND KADOMUKAI 1994】或其他加速度传感器检测到,即所称的g传感器【YOKOYA ET AL. 1990】和控制信号。加速度信号可传给每个车轮的线性控制ER射流阀来控制减振器筒ERF凝固。
结果,包括侧倾和俯仰的姿态改变可被消除,并且智能车的姿态可保持不变。
为了补偿控制响应的延时,侧倾可通过预测随转向角的侧倾以及车速传感器在转向伊始得到控制。
当预测性和自适应、半主动ABW 4WA悬架机电一体化控制系统发现一个突然的公路/越野颠簸时,可以快到几乎足以在冲击抵达智能车弹簧之前作出反应。
实践中,预测性和自适应、半主动ABW 4WA悬架机电一体化控制系统使高速起伏波动消失,防止触底,并使在粗糙的道路/越野路面上保持平稳行驶。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。