



垂直机电控制的预测性自适应、主动E-M ABW 4WA悬架机电一体化控制可使控制姿态、乘坐舒适度、稳定性和车身高度,以及部分控制纵向和横向机动性变成可能。同时,三模混合SBW 4WS转向机电一体化控制也可使改进也许是横向操纵性的稳定性和可控性成为可能【FIJALKOWSKI 1995,1997】。
除预期的之外,这些异构分立汽车的(heterogeneous discrete automotive)功能系统的各系统的性能得到大大改进,并大大影响性能。
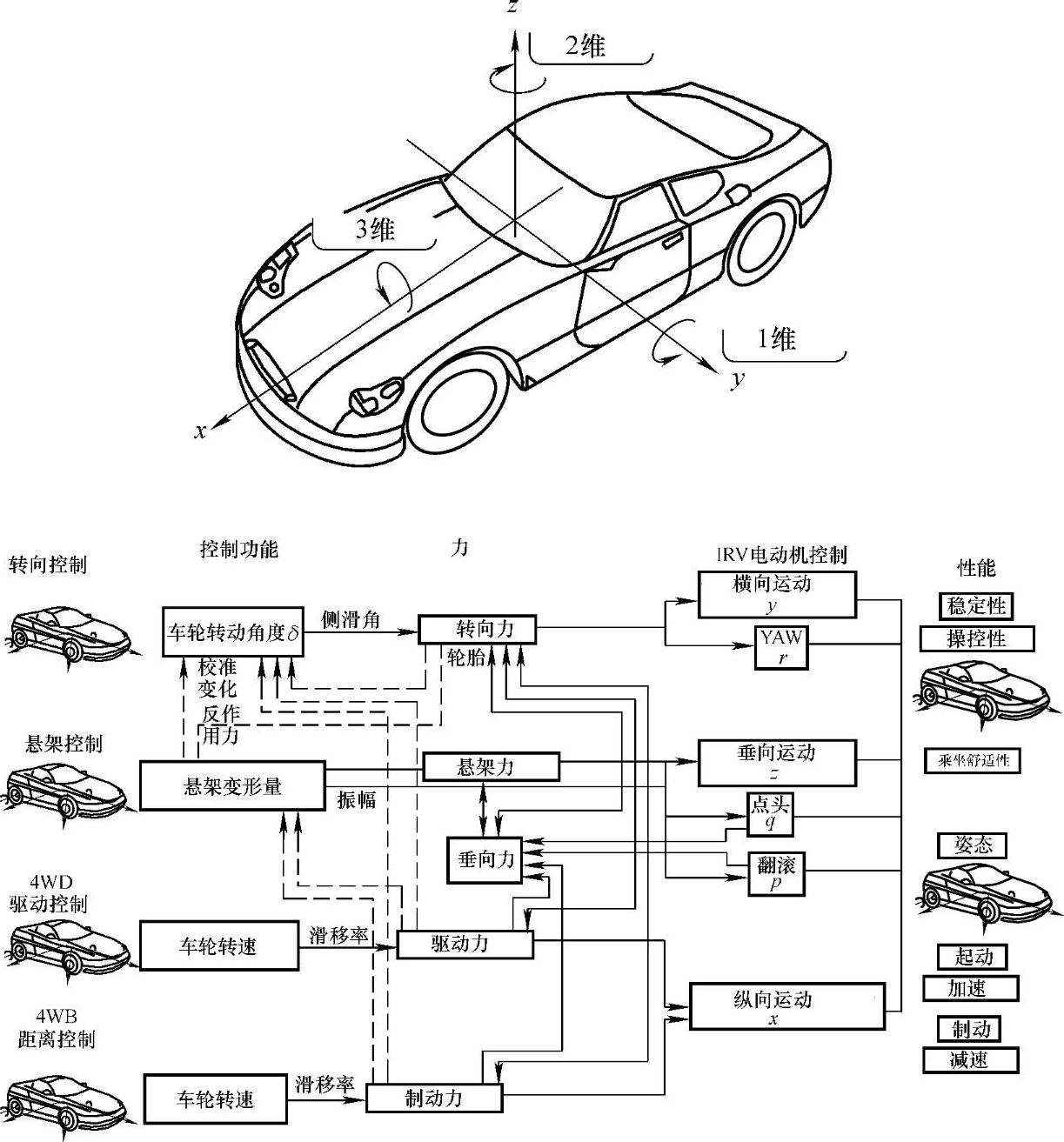
如图1-49所示,这可能是因为,一辆智能车的整体式一体成型车身运动动力学,如转弯(横向运动)和弹起/回弹(垂直运动)以及行驶/制动(纵向运动),可能通过轮胎的公路/越野接触力彼此密切相关。轮胎可能是一辆智能车和公路/越野路面间的唯一接触点【FIJALKOWSKI 1997】。
在图1-49中,粗线表示基本反应,细线表示其他功能的动作,虚线表示限制。通过增加每个汽车功能系统的机电一体化控制增益,可预期更多性能会得到优化。除了粗线或其他汽车功能系统的动作之外,影响也不能被忽视。
例如,如果机电控制的可预测自适应ABW 4WA悬架机电一体化控制系统减少了侧倾,那么横摆响应可能经常是弱的。
同时,如果三模混合SBW 4WS转向机电一体化控制系统的横摆响应可被改善,则侧倾收敛也可能被弱化。在一个稳定状态下,通过消除侧倾,侧倾不足转向(roll-understeer)功能不能用,同时可能出现侧倾过度转向(roll-oversteer)现象。
因此,每个动态汽车功能机电一体化控制系统对性能有很大影响,可能比单个控制影响还大。对于智能车来说,更佳的综合性能(以消除不同力导致的非预期的动作)是非常重要的。
每个动态汽车功能机电一体化控制系统的协同控制可使动态汽车机电一体化控制超系统为整个智能车提供一个均衡的性能。
而且,通过每个动态汽车功能机电一体化控制系统的单个控制装置的聚合,性能可以得到改善。
计划的车载RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的电子控制仪(electronic control instrument,ECI)有一个共中心配置,在这种配置中全部车载DBW 4WD驱动、BBW 4WB制动、ABW 4WA悬架以及SBW 4WS转向机电一体化控制系统的电子控制单元(ECU)被集中在一个地方。
 (https://www.xing528.com)
(https://www.xing528.com)
图1-49 协同智能车的整体式一体成型车身运动机电一体化控制【FIJALKOWSKI 1997】
这造成趋势:制造与智能车连接的电气连接(布线)、往复式E-M执行机构和旋转E-M电动机。显而易见的是,一种如图1-50所示的混合(共中心的/分散)配置被使用【FIJALKOWSKI 1997】。
放置在每个SM&GW位置的专用车载传感器(in-vehicle sensor,IVS)和执行机构次级系统的电子控制位(electronic control bit,ECB),可以与一个双方向感知光纤车载数据链结合用于信息交换。
因此,该车载RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的ECI可放置在中心,它可以计算整台智能车的整体式一体成型车身或底盘运动机电一体化控制。它也可以在车载SBW 4WS转向、ABW 4WA悬架、DBW 4WD驱动和BBW 4WB制动机电一体化控制系统的ECU间交换数据。数据可在SM&GW转换为IVS和执行机构次级系统的ECB。

图1-50 SBW 4WS、ABW 4WA、DBW 4WD和BBW 4WB机电一体化控制装置中智能汽车的整体式一体成型车身、space-chassis或body-over-chassis运动机电一体化控制的概念
在这种方式中,有可能将往复式E-M执行机构和旋转E-M/M-E电动机/发电机与标准件及其IVS和执行机构次级系统的ECB组装在一起,这似乎是一个很有前途的智能车的一体成型车身或底盘运动机电一体化控制。不可预测性和不准确性之间的区分也许能通过考虑明确集合或模糊集合变得更加清晰。
通用集合U可能是智能车的整体式一体成型车身或底盘运动机电一体化控制的一个车载RBW或XBW整体式一体成型车身、space-chassis或body-over-chassis运动机电一体化控制超系统的ECI;四个集合A、B、C和D可能分别是SBW 4WS、ABW 4WA、DBW 4WD和BBW 4WB机电一体化控制装置的车载SBW 4WS转向、ABW 4WA悬架、DBW 4WD驱动和BBW 4WB制动机电一体化控制系统的ECU。并集是SBW 4WS、ABW 4WA、DBW 4WD或BBW 4WB机电一体化控制装置或全部(也就是智能车的整体式一体成型车身、space-chassis或body-o-ver-chassis运动机电一体化控制)的全部车载SBW 4WS转向、ABW 4WA悬架、DBW 4WD驱动以及BBW 4WB制动机电一体化控制系统的ECU的明确或模糊集合。
交集是全部单个SBW 4WS、ABW 4WA、DBW 4WD或BBW 4WB机电一体化控制装置的全部车载SBW 4WS转向、ABW 4WA悬架、DBW 4WD驱动以及BBW 4WB制动机电一体化控制系统的ECU。图1-50可充分地解释智能车单个动态汽车功能机电一体化控制系统间的整体式一体成型车身、space-chassis或body-over-chassis运动机电一体化控制的主要目的。
图1-50中的“SBW 4WS+ABW 4WA+DBW 4WD+BBW 4WB”表示单个SWB 4WS、ABW 4WA、DBW 4WD以及BBW 4WB机电一体化控制装置的简单聚合,“SBW 4WS×ABW 4WA×DBW 4WD×BBW 4WB”表示智能车SBW 4WS、ABW 4WA、DBW 4WD以及BBW 4WB机电一体化控制装置之间的整体式一体成型车身、space-chassis或body-over-chassis机电一体化控制。“SBW 4WS×ABW 4WA×DBW 4WD×BBW 4WB”对性能改进超过了“SBW 4WS+ABW 4WA+DBW 4WD+BBW 4WB”。这种专用汽车功能机电一体化控制装置之间的智能车的整体式一体成型车身或底盘运动机电一体化控制更加复杂,因为它可能由许多组件组成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。