



智能汽车最根本的理念是它考虑与驾驶人配合使用。在驾驶人遇到麻烦时它迅速行动。比如,如果汽车滑到一边,那么智能汽车立即在每个车轮上施加极佳的平衡制动以稳定汽车,松开加速踏板即可降低车速(即使驾驶人的脚放在上面),同时转向自行校正。或在驾驶人沿高速公路高速行驶时,智能汽车自动感应驾驶人与前方车辆的距离,并减少车速以防止碰撞,完成这些无须驾驶人控制转向盘。
使用RBW或XBW先进技术的简单理由是,它大大减少了成本,从而对汽车制造厂家的成本和库存管理都有好处,同时简化了装配。但除此之外,机械或流体连接装置的淘汰也充当了其他如自动车道保持、稳定性和防撞算法等非常先进技术的催化剂,这种自动驾驶的概念车即将来临。
这种智能愿景已遗失在真正的汽车中,它不存在或还没有存在于实车中。然而,汽车往往被用于更加复杂的任务而不是简单的功能,因此对车辆性能的需求在增长。仅仅几年以前,谁会想到路上的智能汽车也可以无人驾驶呢?
无人智能汽车可使用传感器+全球定位系统(geographic position system,GPS)来确定它的位置(误差不超过5cm)。安装在车顶的激光器持续扫描智能车辆前方公路或越野路面,寻找牲口栏杆、沟槽、铁丝网或者停在车道上的抛锚车辆。
虽然无人智能车辆所用激光只观察前方4倍车长距离内的情况,但自主式智能系统可利用远程雷达扫描地平线。
安装在智能汽车里面用来避免泥土飞溅的白天/夜间立体可视红外(IR)摄像机(图1-45),可以拍下行进中的高清晰度图像,同时计算机程序“学习”地形并在地图上标出最佳的公路/越野路面指示【CHEN 2003】。
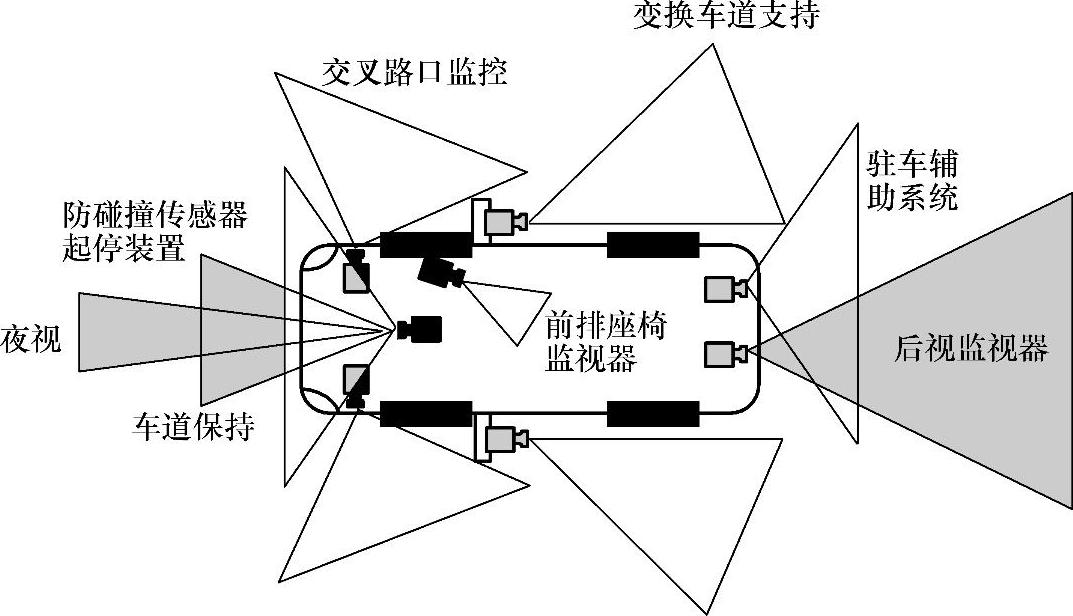
图1-45 白天/夜间立体视觉IR(红外线)摄像机的定位【OMRON;CHEN 2003】
例如,无人智能汽车的大脑,即多核奔腾M微处理器,可被置于行李箱内。
机器应该防震以便能在公路/越野路面碰撞中继续使用,同时E&IN机电一体化控制系统应该对每个计算机程序有多份拷贝。
一根厚电线脊柱(a thick spinal column of electrical wires)将微处理器与机电一体化控制的制动踏板、加速踏板以及E-M电动转向柱相连。
图1-46所示为一辆带RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的概念智能车(由Hitachi公司开发)。该概念车的目标是改善车辆动力性和布局【UEKI ET AL. 2004】。
大部分交通事故是由驾驶人造成的(即人为错误),因此我们一直在积极开发自适应驾驶人辅助系统,并且有些系统已经实现了。自适应驾驶人辅助系统利用汽车的机电一体化控制,尽力实现在一个事故发生前阻止人为失误事故的发生,或者减轻事故所造成的破坏。
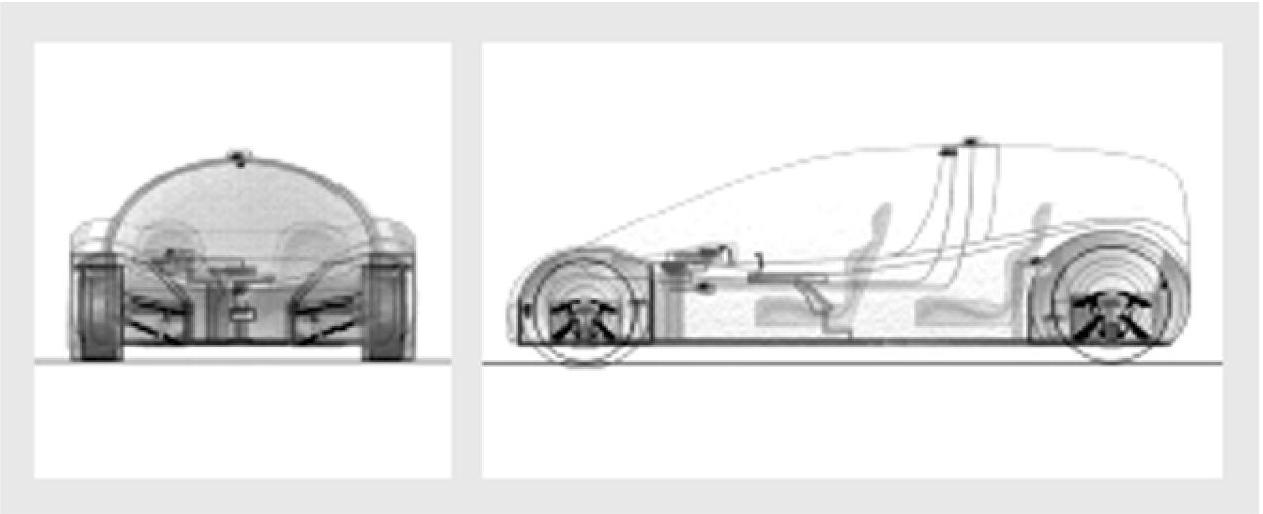
图1-46 一种概念车的草图【UEKI ET AL. 2004】
一个自适应驾驶人辅助系统通过以下方式帮助驾驶人来保证安全驾驶:支持驾驶人的“识别”(recognition)“判断”(judgment)“动作”(actuation)减少驾驶人疲劳并维持驾驶人表现;如果发现某些动作中的过失被认为有危险则发出警告信号;在驾驶人不能避免碰撞的情况下采取机电一体化程序控制汽车。
采用图1-47所示的环境识别设备,如毫米波雷达和视觉传感器,可以全方位探测驾驶环境的情况【YOSHIDA ET AL. 2004】。这些设备放置在车辆的前、后、左、右各位置。(https://www.xing528.com)
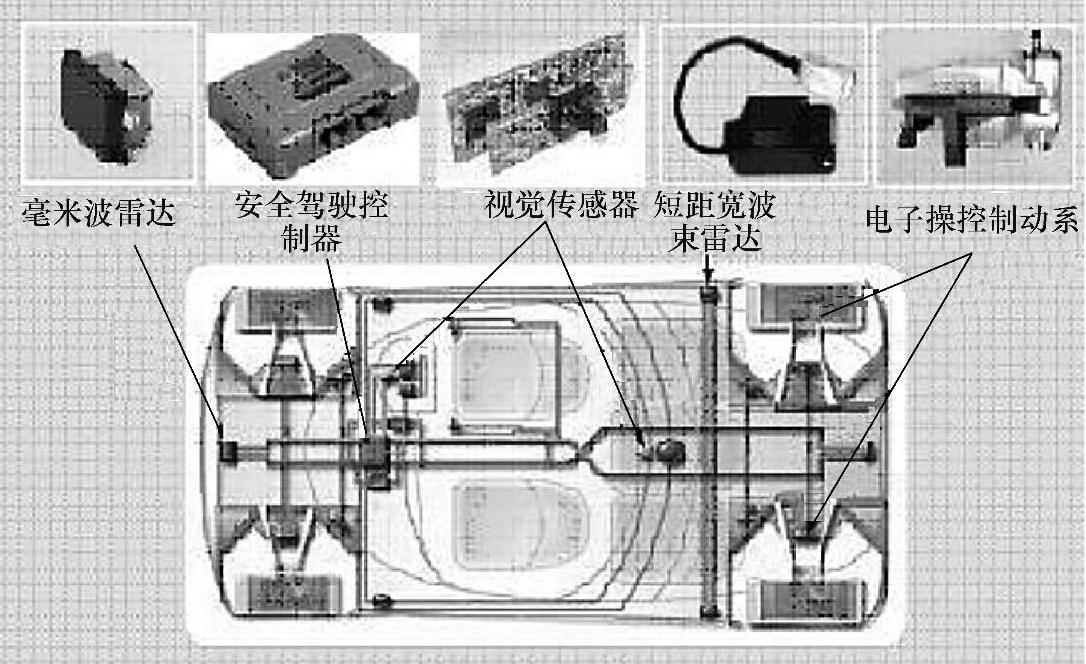
图1-47 形成未来适应驾驶人辅助系统的主要元件【YOSHIDA ET AL. 2004】
这些设备从周边基础设施和一个导航系统接收信息,然后安全驾驶控制器根据这些信息控制机电一体化装置执行驾驶(ECE/ICE节气门)、制动以及转向行为。该信息利用一个安装在车辆内部的E&IN进行交换。
对于智能汽车,功能应该更多。比如,对于电动和机电一体化控制的全时电传线控驾驶(drive-by-wire,DBW)四驱(four-wheel-driven,4WD)×电传线控制动(brake-by-wire,BBW)四轮制动(four-wheel-braked,4WB)×电传线控转向(steer-by-wire,SBW)四轮转向(four-wheel-steered,4WS)×电传线控减振(absorb-by-wire,ABW)四轮减振(four-wheel-absorbed,4WA)的智能汽车,有着极高的机动性和操纵性【FIJALKOWSKI AND TROVATO 1994;FI-JALKOWSKI AND KROSNICKI 1994;FIJALKOWSKI 1995,1997】。
DBW 4WD驱动和BBW 4WB制动、SBW AWS转向及ABW 4WA悬架机电一体化控制系统被设计为安装在一辆全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能汽车中。
这种聪明的智能汽车使用RBW或XBW先进技术,基本淘汰了使汽车能够转向、制动、加速以及调节悬架控制的机械式和流体式系统。它用复杂和可靠的机电一体化控制系统取代了它们。在智能汽车中,电子信号传达驾驶人转向、加速、制动停车等意图。
图1-48显示了高性能全面节能全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能车的一个概览。这种车的重心可能在车辆车身的中心位置【FIJALKOWS-KI 1997】。
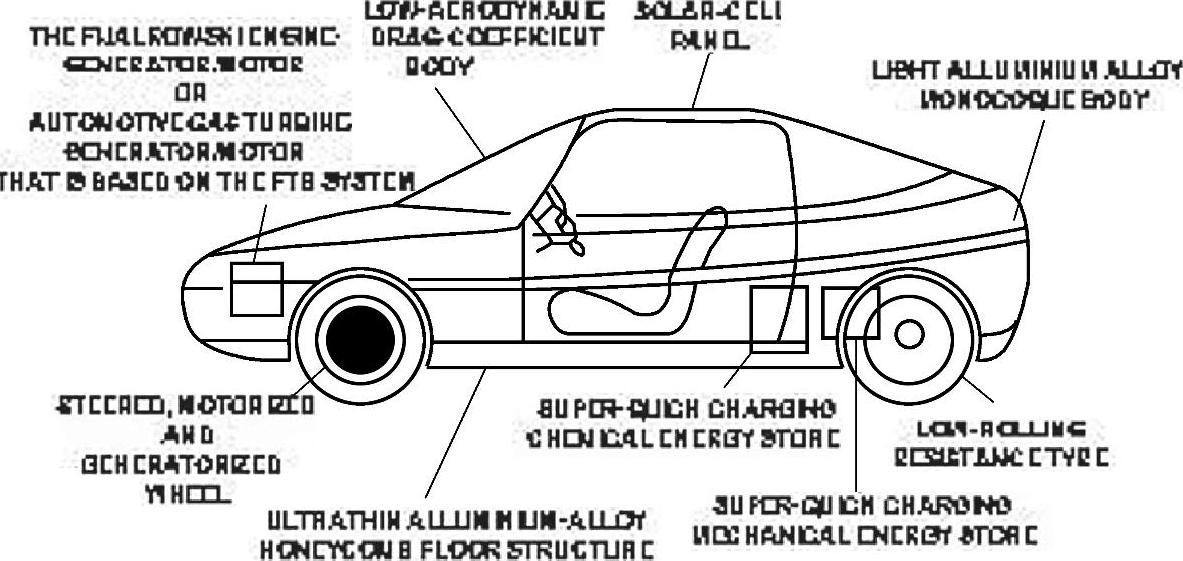
图1-48 一种高性能全面节能智能车的主要布局【FIJALKOWSKI 1997】 (注:此图为作者提供的原图,未作改动)
车辆车身每侧的独立弹簧支撑的转向、电动机和/或发电机(SM&GM)可带独立可变阻尼电流变液(electro-rheological fluid,ERF)或巨电流变液(giant-electro-rheological fluid,GERF)减振器的半主动ER ABW 4WA悬架。
四个(两前两后)独立弹簧SM&GW轮可由四个DC-AC/AC-DC宏换向器电磁激励轮毂电动机/发电机独立驱动和/或减振;每个前轮驱动(front-wheel drive,FWD)或后轮驱动(rear-wheel drive,RWD)和每个SM&GW轮的角速度可被一个全时RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统随意控制。该机电一体化控制超系统整合了全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能汽车的DBW 4WD驱动和BBW 4WB制动、SBW AWS转向及ABW 4WA悬架机电一体化控制系统。
加速度传感器【YAMAKADA AND KADOMUKAI 1994】可固定在智能汽车的几何中心。每个FWD和/或RWD所需的转向动力可以由车轮转矩仪测量得到,车轮转矩仪被专门设计用来消除SM&GM轴承上FWD和/或RWD的弯曲效应。
在全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能车中,也就是汽车用燃气轮机(automotive gas turbine,AGT)的ECE/ICE可以被“无曲柄式”磁流变液(magneto-rheological fluid,MRF)或纳米磁流变液(nano-magneto-rheo-logical fluid,NMRF)机电一体化换向器ICE替代,这种替代用ICE被称为Fi-jalkowski发动机(FE),或被基于Fijalkowski涡轮增压(Fijalkowski turbine boos-ting,FTB)系统的AGT取代;而后或前CH-TH-F-M、DBW两轮驱动(2WD)驱动机电一体化控制系统由串联混合化学-热-流体-机械-电子-机械的(chemo-thermo-fluido-mechano-electro-mechanical,CH-TH-F-M-E-M)或E-M DBW 4WD驱动机电一体化控制系统取代。
全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能车(图1-48)有一个独特类型的三模混合SBW 4WS转向机电一体化控制系统。该系统整合了可调整转矩和/或速率前轮转向(front-wheel-steering,FWS)和后轮转向(rear-wheel-steering,RWS)齿轮机构。
当转向盘转动时,动力转向装置被激活并推/拉智能车直至达到期望的转弯。这种三模混合SBW 4WS转向机电一体化控制系统被证明是一种比较有效的机动性特性,因为制动FWD或RWD转向中没有动力损失,如同在一辆传统FWS或RWS汽车上表现得一样。在操纵这种全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能车的时候,FWD和RBW两者依然有动力,它们平稳和连续的动力使得车辆获得最大的牵引力。DBW 4WD驱动和BBW 4WB制动、SBW AWS转向及ABW 4WA悬架机电一体化控制系统的组件通过所有这些异构分立的汽车功能系统互联【FIJALKOWSKI 1987】,驱动(驾驶)和制动以及悬架(减振/缓冲)和转向(操纵)功率流可以由一个车载RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的车载电子控制仪(electronic control instrument,ECI)控制。该车载电子控制仪(ECI)包括:车载DBW 4WD驱动和BBW 4WB制动、SBW AWS转向以及ABW 4WA悬架机电一体化控制系统的电控单元(ECU)。该电控单元基于专用集成电路(application specific integrated circuit,ASIC)神经模糊(neuro-fuzzy,NF)计算机(或计算机集成块)比例-积分(proportional integral deriva-tive,PID)控制器;车载传感器和执行机构次级系统的电子控制位(electronic con-trol bits,ECB),从驾驶人和/或“机器人驾驶人”(human-and/or telerobotic driv-er,H&TD)接收命令。
全时DBW 4WD×BBW 4WB×SBW 4WS×ABW 4WA智能车有极高的机动性和操纵性,并可由四个相同的独立弹簧SM&GW轮驱动。从而使四个车轮和那些被转向的一样被驱动、减振。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。