



通信协议可以分成两类:基于事件触发的和基于时间触发的。这两种方法在工作原理上存在不同【LEEN AND HEFFERNAN 2001】。
基于时间触发控制器局域网(Time-triggered controller area network,TTCAN)是一种基于CAN的通信协议,不同的是,该协议使用一种时间触发机制而不是CAN中使用的事件触发机制。TTCAN的规范定义在ISO标准11898-4中。该协议使用CAN的全部错误检测机制及稳固性【SHRINATH AND EMADI 2004】。基于事件触发的物理模型被称为一种异步物理模型,而基于时间触发的物理模型则称为同步物理模型。在事件触发物理模型中,数据传输只有在某个事件发生时才发生,如某个按钮被按下或某个拉杆被拉动等。在这种模型中,数据传输在时间线上的任意时刻发生。然而,在基于时间触发物理模型中,数据传输只在时间线上的特定时间间隔发生。在这种模式下,所有节点与某个主节点时钟同步,这样所有节点有相同的时间感。每个节点被分配给一个时隙。只有在分配的时隙期间该节点才能传输。这类似于时分复用(time division multiple access,TDMA)方案。数据传输由于时间推移而发生。但节点是如何知道何时传输其数据的呢?在静态方案中,节点被分配给时隙,但在基于时间触发CAN中,该问题通过传输一个被称为基准帧的特殊帧解决。基准帧通过标识符域其他帧区别开来。该基准消息有一帧开始(start-of frame,SoF)位。该位的接收表示该实例时间内数据传输可以进行。TTCAN规范中定义了两种工作级别。级别1借助基准消息的属性。基准消息确保CAN基于时间触发工作。级别2保证网络中所有节点的全局时间同步。不同的是,对于级别1的实现,基准消息携带用于控制目的的一字节信息;而在级别2实现中,基准消息包含约4字节控制信息和另外用于数据传输的4字节。相比CAN的优势在于,在工作周期,TTCAN除允许常规时间触发消息传输外也允许事件触发消息传输。某些时隙为事件触发消息而保留【SHRINATH AND EMADI 2004】。
RBW或XBW整体式一体成型车身、space-chassis、skateboard-chassis或body-over-chassis运动机电一体化控制超系统(该系统为执行某些关键实时机电一体化控制功能而集成传感器和执行机构)需要TTCAN。这给该网络带来一个可预测行为,而网络的可预测行为由于许多网络的分布式架构而变得非常重要。
一个分布式网络由许多被组织成次级网络的系统组成。每个次级网络可实现一个不同的协议。因此,一个清晰定义了会被随后明确的时隙遵循的传输过程的协议,无疑会减少网络的复杂性,而且可充分利用可用带宽。此外,无论多少,它会减少CAN中授权节点访问总线进行消息传输的仲裁过程所需的时间。它也会减少低优先级消息被长时间限制传输的可能性。在即将出现的汽车中的许多次级网络对于车辆的安全性可能是至关重要的,如汽车中正在实现的RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统。在这些机电一体化控制超系统中,汽车的控制会与它附属的过程解耦【FÜHRER ET AL. 2003】。
因此,在这种情况下,网络的确定性本质还有向传感器和执行机构按时传递消息的可靠性,这是非常重要的。
图1-34说明了TTCAN采用的通信物理模型【SHRINATH AND EMADI 2004】。
该矩阵循环基本上描述整个网络的传输时间表。它定义任何给定时间实例哪个节点应传输。这样,每个节点能够了解到底什么时候它应该传输。该矩阵循环随时间重复。每个基本循环由几个独占和/或仲裁及自由时间窗组成。这种结构是高度列面向的。矩阵循环中的每个列称为一个传输列。所有属于某个单传输列的时间窗长度相等。计数器Cycle_Count被用来表示当前基本周期数量。
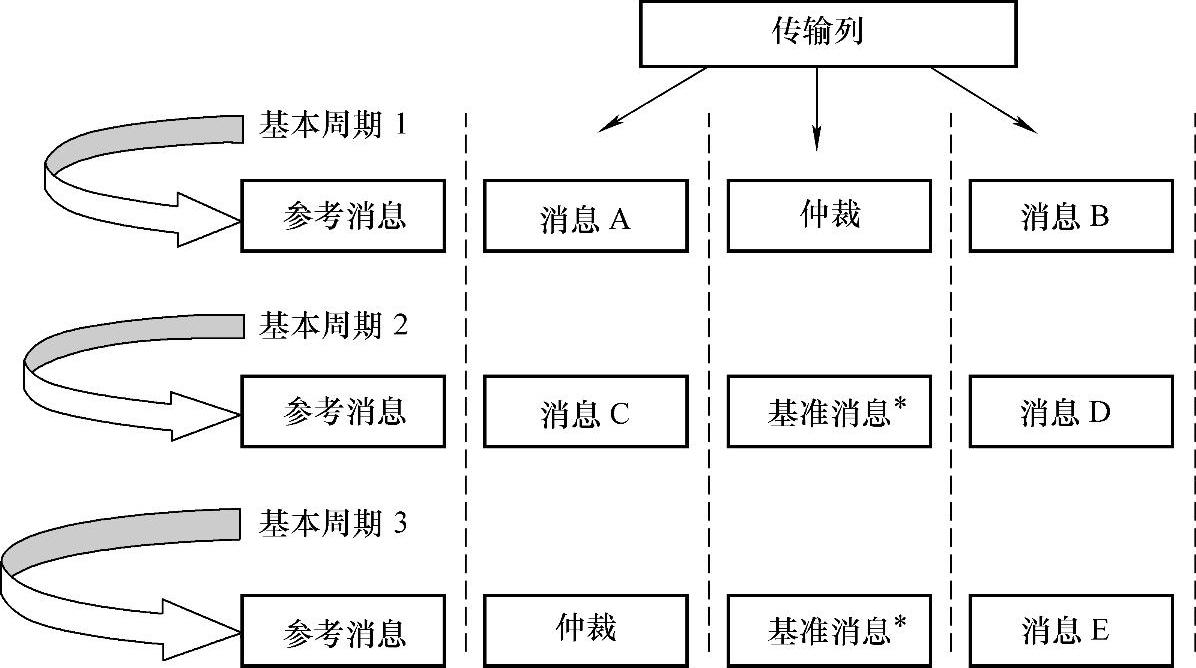
图1-34 TTCAN中的矩阵循环【SHRINATH AND EMADI 2004】 (注:图中∗表示原文不甚清楚,此处为猜测)
它每次执行完成一个基本周期。除独占和仲裁时间窗,另一个称为Tx Enable的时间窗被使用。它包含在独占和仲裁时间窗之内。它被用来向节点表示允许该节点开始传输的时间。这样做是为了当前消息的下一个消息不因为当前消息的延迟传输而被延时【SHRINATH AND EMADI 2004】。(https://www.xing528.com)
TTCAN中任何网络事务中使用的时间单元称为网络时间单元(network time u-nit,NTU)。它可以是1级TTCAN中的CAN-位持续时间,或者是2级TTCAN中实现的几分之一秒。
一个消息状态计数器(message state counter,MSC)附属于每个传输或接收的消息。该消息的一个错误通过MSC中的一个增量确认。某个节点在MSC达到值为7或两个MSC之间差值大于2的时候标记一个错误。TTCAN协议的实现由TTCAN IP模块处理,TTCAN IP模块不仅实现TTCAN协议(ISO 118998-4)也实现CAN协议(ISO 118998-1)【TTCAN 1998】。该模块获得的位速率达1Mbit/s。该模块提供一个基于时间触发网络的所有需求,包括全局时间同步和时钟漂移补偿。
在一个CAN网路中,消息对象和消息masks被存储在消息RAM中操作。对于TTCAN网络,触发器对象存储在触发器RAM中。消息处理程序处理全部消息处理指令。
通过一个与模块和外部CPU连接的接口卡,不仅可以改变消息处理程序内核,也可以改变一些其他的内核【SHRINATH AND EMADI 2004】。
总的来说,采用向一个CAN的协议栈追加的一个会话层,可以实现一个既给网络带来灵活性又带来确定性的CAN时间触发物理模型。
这一事实可被RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统利用。慢慢地,这种网络会被加入到已有的机械和/或流体(液压和/或气动)后备系统中,来保证运行机电一体化控制系统的完全安全性。
使用一种基于时间触发架构(time-triggered architecture,TTA)的优势在于系统不会随事件而过载(图1-35)。它会用附加电路解决挂起的场景【SHRINATH AND EMADI 2004】。
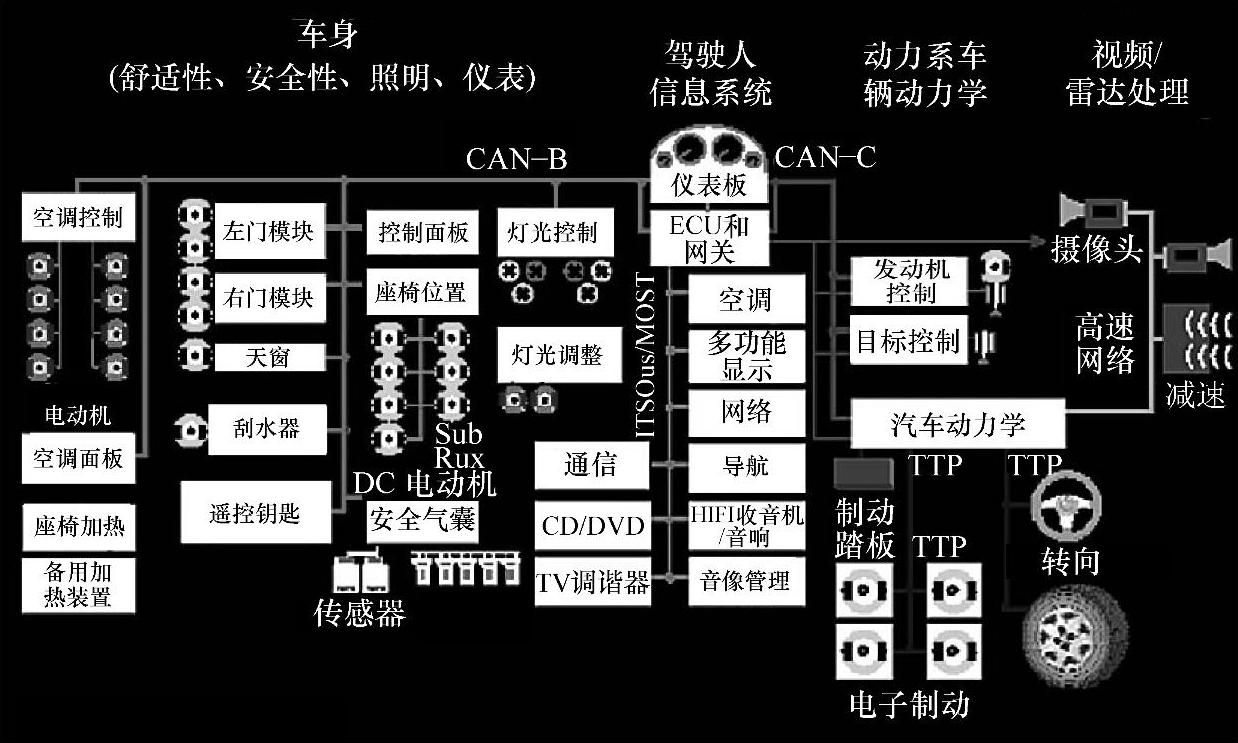
图1-35 时间触发协议(TTP)汽车内整体连通性【MOTOROLA 1999】
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。