



局域互联网络(local interconnect network,LIN)是一种已为汽车建立的通信协议【KOPETZ ET AL.2003】。该协议基于SCI(UART)数据格式,采用单主/多从架构。1998年组建了一个联盟,由奥迪、宝马、戴姆勒、克莱斯勒、沃尔沃、大众、VCT以及摩托罗拉组成,负责建立该协议的一个规范。LIN的开发基于这样一种通信协议的需要:协议要非常经济有效,不仅解决通信规范,同时也要解决其他如信号传输、编程以及节点互联的问题。在汽车协议的开发整理上,它基本上是一种全面的方法。
LIN享有的一个基本好处是:与如CAN协议相比它非常经济(图1-27)。然而,该好处被其内在的局限性抵消,如低带宽和低性能,网络的单一主拓扑结构等【SHRINATH AND EMADI 2004;MOTOROLA 2007】。
在设计一个网络时,需要考虑相当多的标准。为了设计一个适合要求的网络,应平衡如带宽、安全性、延迟、电磁干扰(electromagnetic interference,EMI)、容错以及成本等因素。设计网络时,基本上又可采用两种不同的方法。
一种方法是以一种分区方式划分传感器和执行机构,划分的传感器和执行机构与某个中心电控单元(ECU)相连。不同的主ECU彼此用CAN总线相连。在这里大量使用CAN是为了让信号交换使用高带宽。另一种方法则完全放弃了分区概念。在这种方法中,全部的执行机构和传感器通过LIN链接与中心ECU相连。这种方法具有能够扩展的优势。要容纳追加的节点,无须对网络做重大变化。如之前所述,LIN基于SCI,(UART)字节字接口。这种网络有一个单主/多从拓扑结构【SPECKS AND RÁJNAK 2000】。
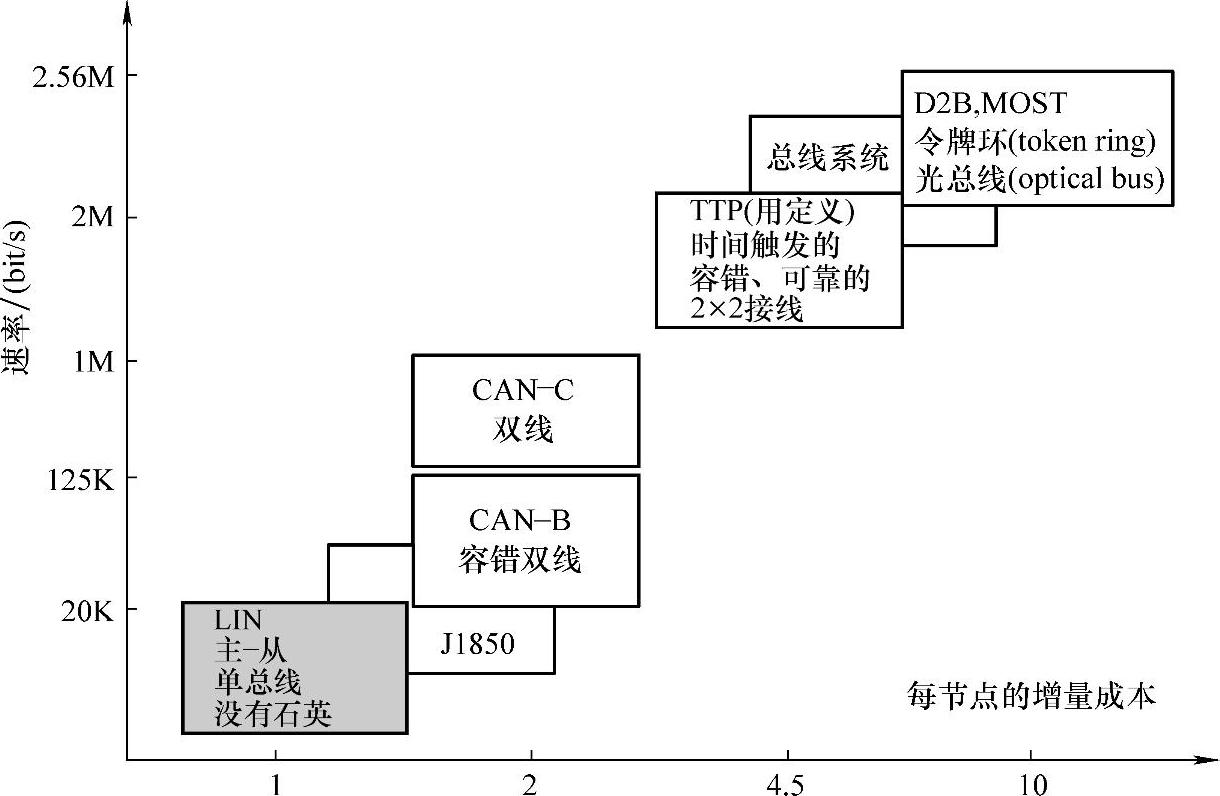
图1-27 MUX标准(成本和传输速率)【MOTOROLA 2007】
所有的从节点均有传送和接收的任务。主节点与传送和接收任务分离,它的附加任务是维护网络中的同步。同步靠一个消息头完成。该消息头由同步间隔、同步字节以及一个消息标识符组成。消息标识符被节点用来识别传给它们的消息。每个标识符对每个节点是唯一的。通过标识符节点了解要给它的消息。必须记住,消息标识符表示消息的内容而不是目的地。一旦节点已抵达给它的消息,则它会回送一个响应,该响应包含长度为2字节、4字节或8字节的数据和一个检验字节。每个消息帧由消息头和响应部分组成【SHRINATH AND EMADI 2004】。
每个消息帧由一个10比特位字节域组成。这10比特位包括1个显性“起始”位、8个数据位和1个隐性“终止”位。一个消息帧包括一个主节点发送的消息头和一个从节点发送的响应部分。主节点发送的消息头包括一个同步间隔域、一个同步域和一个标识符域。每个消息帧采用8N1编码方案。为确保正确同步,同步间隔域不得短于13bits。同步域的格式是等价于十六进制串“0×55”的一串二进制数字。采用这种同步模式类型,从节点不需要石英或陶瓷谐振器就可以实现自同步。LIN基本上定义了两种同步级别:未同步的,此时从节点时钟时间与主节点时钟时间相差小于±15%;同步的,此时从节点时钟时间与主节点时钟时间相差小于±2%【SHRINATH AND EMADI 2004】。标识符中有4个被保留用于专用的通信。在保留的4个标识符中,其中两个用于上传和下载用途。它们与一般数据帧的唯一不同在于,这些帧中有用户自定义命令消息,而不是数据。另外两个专用标识符用于确保与LIN协议未来版本保持向上兼容性。这两个标识符称为“扩展标示符”。LIN中有三种通信方式类型:主机至单从机或多从机、从机至主机及从机至从机(从机无须通过主机路由传送就可彼此交谈)。参见图1-28中的图解【SHRINATH AND EMADI 2004】。一个典型的LIN有一个单主节点和包含在网络中的多达2~10个的从节点。LIN的传输速率范围为2.4~19.6kbit/s。LIN总线可支持的电压水平大约是DC 13.5V。(https://www.xing528.com)
每个数据帧包含带一个6位标识符的2~8字节数据。单线传输、低成本实现和无需谐振器是LIN的优势。其劣势是低带宽和一种单总线访问的方案。

图1-28 LIN中的数据通信【SHRINATH AND EMADI 2004】
LIN一般用于车门和天窗控制,也用于转向盘和转向柱控制(图1-29)【MO-TOROLA 2007】。
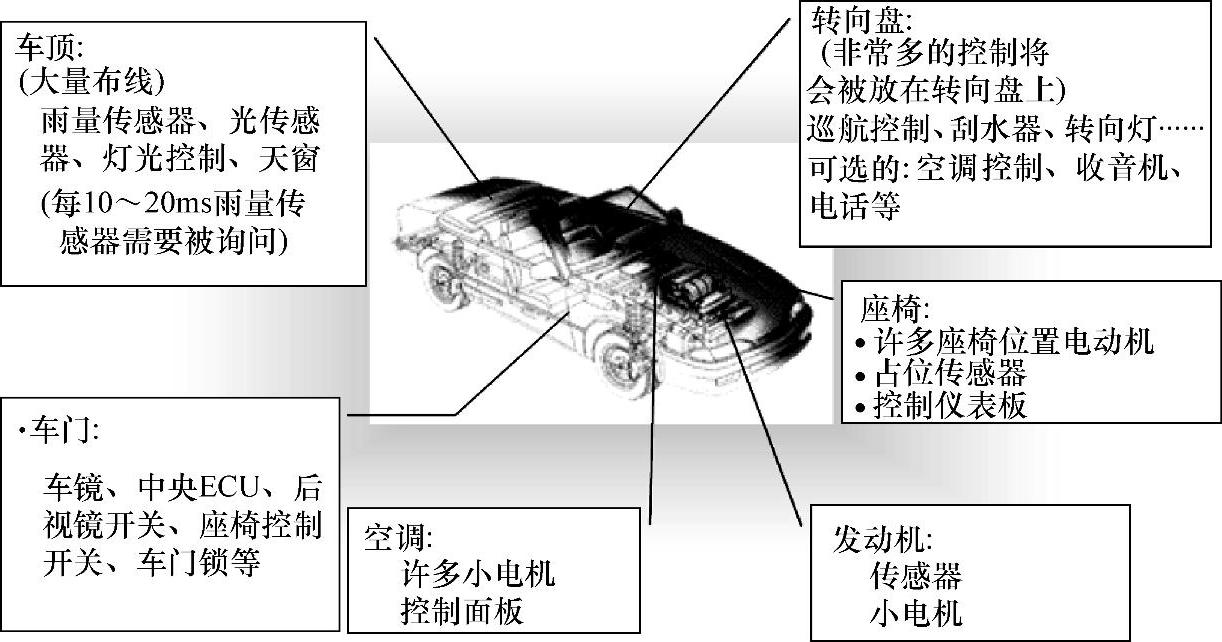
图1-29 经典的LIN应用【MOTOROLA 2007】
其他的实现包括智能刮水器E-M电动机、传感器和开关面板、座椅控制以及加热控制【SHRINATH AND EMADI 2004;MOTOROLA 2007】。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。