



正如局域网(LAN)连通计算机一样,控制网络连接一辆汽车的电子设备。这些网络有助于分布式应用中信息和资源的共享。过去,连线是将一个元件与另一个元件连接的标准方式。然而,随着机电一体化内容的增多,越来越多的分立布线的使用便碰到了技术壁垒。增加布线会增加车重,减弱性能,也使得它难以遵循可靠性标准。对一辆普通标定好的汽车来说,每外加50kg的配线,或者外加100W动力,则每行驶100km油耗(SFC)会增加0.2L。同时,复杂的线束占据着大量的车辆空间,限制了功能的扩展。最终,线束成为汽车电气系统中最昂贵和复杂的元件。幸好,现今的基于串行协议的控制和通信网络,应对了大量分立布线的问题。例如,在一篇1998年的新闻稿中,摩托罗拉报告称,用局域网代替一辆宝马车的四个车门中的线束,使得车重减少了15kg,同时提升了功能。
20世纪80年代早期开始,集中式网络和分布式网络先后代替了点对点连线方式【LEEN ET AL.1999】。
图1-6展示了一辆现代汽车的E&IN架构中包含的系统和应用的数目【LEEN ET AL.1999;XILINX 2006】。
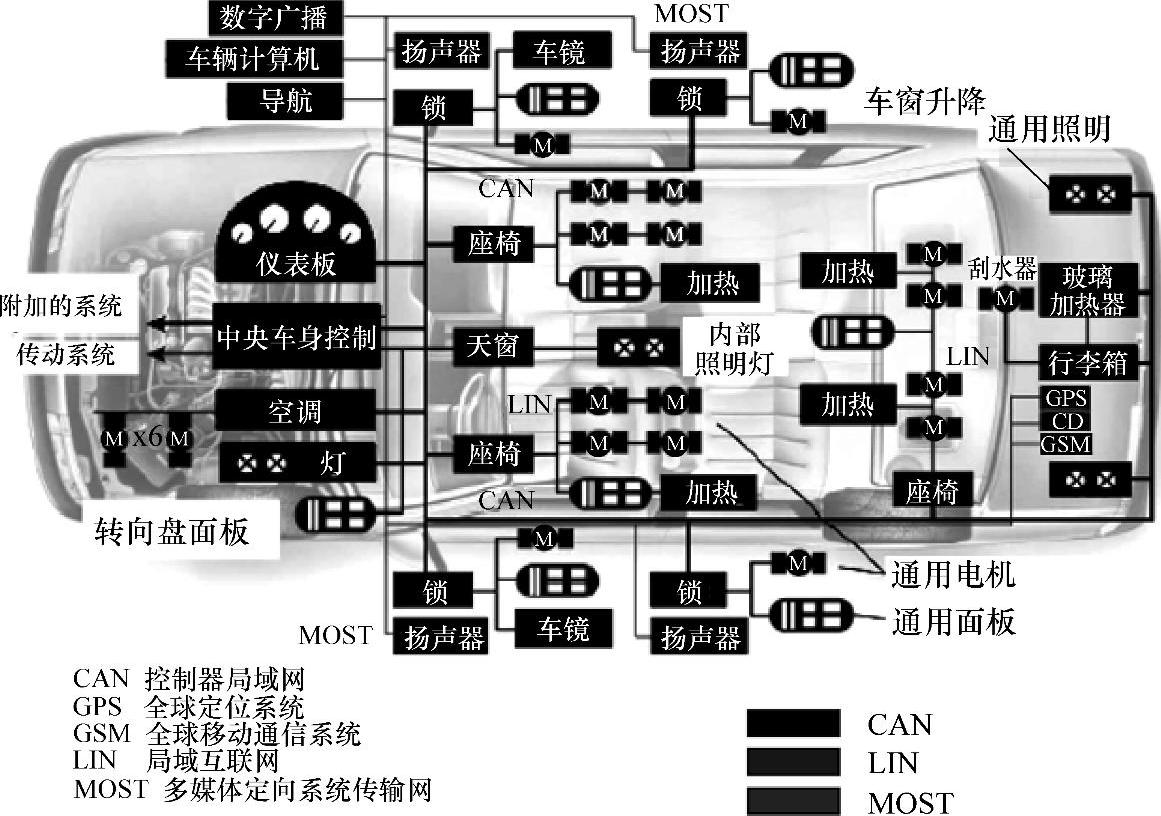
图1-6 一辆现代汽车的E&IN架构的一个子集,显示出合并今后大量电子设备的趋势【LEEN ET AL.1999;XILINX 2006】
机电一体化应用增长的趋势,在图1-7【SEEWALD 2000】中所示的整体式一体成型车身或底盘运动先进技术路线图中有所反映。
防抱死制动系统(Anti-lock braking systems,ABS)在20世纪70年代推出,随后在80年代出现了牵引力控制系统(traction control systems,TCS)。在1990~2000年间,引入了车辆稳定性控制系统(vehicle stability control,VSC)、制动辅助(brake assist,BA)和主动侧倾控制系统(active roll control,ARC)。今天,推出了第一代自适应巡航控制系统(adaptive cruise control,ACC)。
展望下一个十年,有几个创新系统在研讨中,即BBW AWB制动系统、SBW AWS转向(操纵)系统,以及机电一体化控制的ABW AWA悬架(减振/缓冲)系统。
完整的RBW或XBW,是汽车工业中使用的术语,用来表示不同汽车功能的机电一体化控制。这也会促进迈出防撞干预的第一步。整体式一体成型车身或底盘运动机电一体化控制和防撞系统会水到渠成【SEEWALD 2000】。
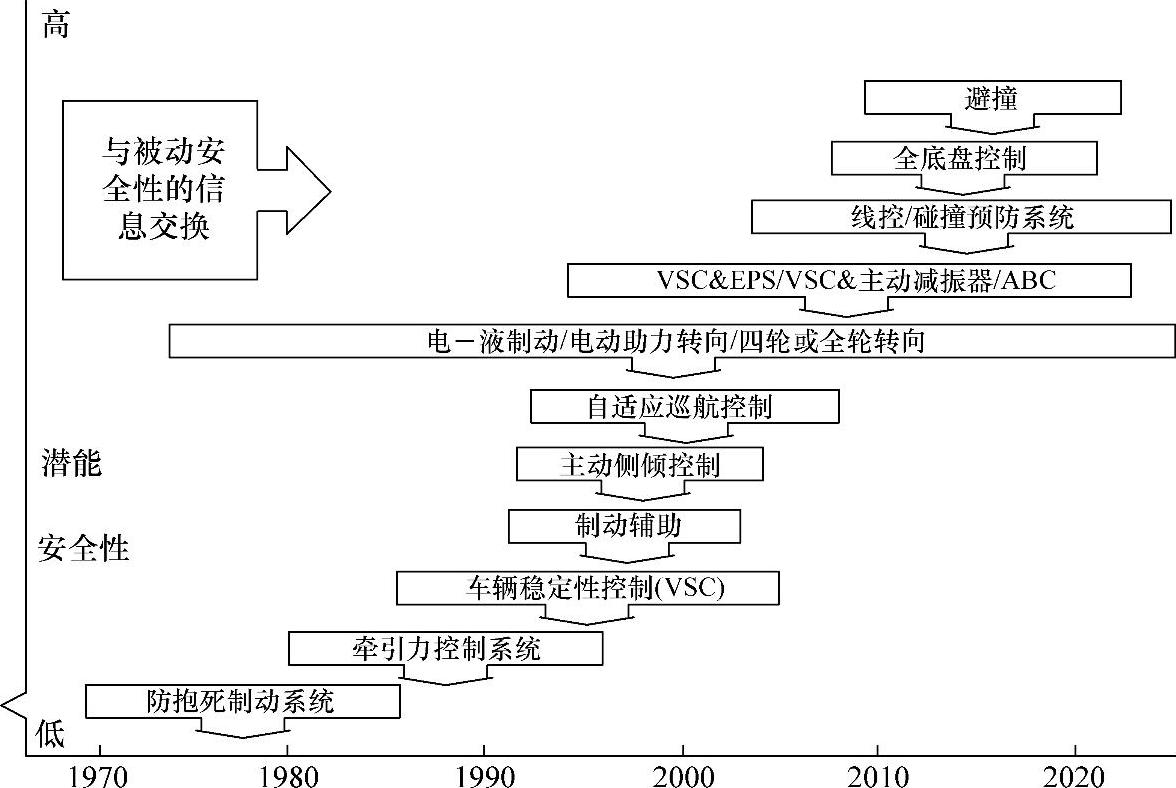
图1-7 整体式一体成型车身或底盘运动先进技术路线图【SEEWALD 2000】
图1-7所示为整体式一体成型车身或底盘运动先进技术路线图,反映了主要汽车OEM厂商看到的大体时间线。这些新的功能会与被动安全系统连接,以优化安全性。
目前的碰撞传感器只有在碰撞发生后才可获得加速度/减速度测量值【SEE-WALD 2000】,将来,雷达和光学传感器也会用于预碰撞情况,会使安全措施更早地起作用。(https://www.xing528.com)
图1-8描述了一个更加详细的整体式一体成型车身或底盘运动先进技术路线图。路线图显示了若干开发阶段【SEEWALD 2000】。
阶段1,基于以前在纵向稳定系统(ABS和TCS)上的工作,可以集中在转弯和横向稳定性优化上。在这个阶段,工作重点可定在不同独立系统内部的优化上,如VSC、电动辅助转向(electrically assisted steering,EAS)、主动侧倾和车身控制系统(active roll and body control,AR&BC)等。优化可以改善操纵稳定性,减少转向力,优化行驶,还可减少车身运动【SEAWALD 2000】。
阶段2,重点放在乘坐与操纵(ride and handing,R&H)优化上,独立的超系统可能会连接为一个集成系统。
自适应巡航控制只在超过56km/h时才激活,可以通过一个起停(stop-and-go,S&G)功能对其进行扩展。
通过硬件集成和传感器共享,成本得以降低。同时稳定性、乘坐舒适性和抓地性能得以增强【SEAWALD 2000】。
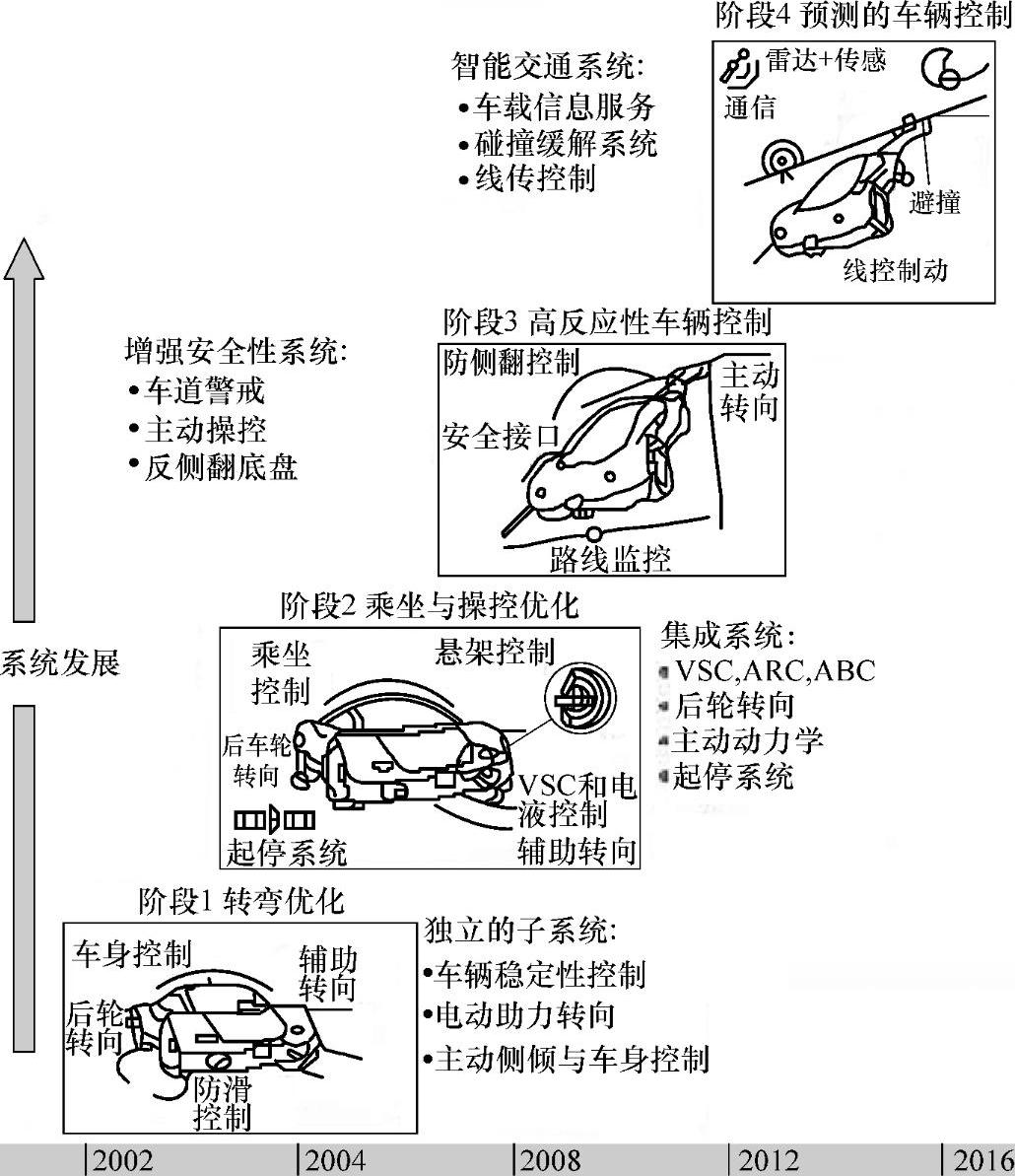
图1-8 TRW整体式一体成型车身或底盘运动先进技术路线图【SEEWALD 2000】
阶段3,以高标准汽车的反应性整体式一体成型车身或底盘运动机电一体化控制为目标,重心在增强的安全系统上,包括车道预测(一种主动车道保持控制系统)、主动转向及防侧倾底盘等。
此外,可能有一个与被动安全系统“交流”的强大界面,特别是与预紧式安全带系统。要为主动转向和车道保持系统提供控制信号,前视、后视及侧视传感器是必不可少的。主动转向要求驾驶指令叠加,而这反过来要求转向盘和转向齿轮间有限解耦。这种主动式转向机电一体化控制可以使车轮与公路/越野路面附着力最大化,可以帮助防侧翻,显然也可以减少事故发生和降低事故的严重程度【SEA-WALD 2000】。
最高级别的整体式一体成型车身或底盘运动先进技术可在阶段4获得,方式是预测式RBW或XBW整体式一体成型车身或底盘运动机电一体化控制。
为尽可能地预防碰撞和改善交通流,带一个RBW或XBW整体式一体成型车身或底盘运动机电一体化控制超系统的汽车,可能已经准备好与智能交通系统(intelligent transport system,ITS)整合。但是,在传感器、优化控制装置以及整个交通基础设施方面可能还需要更多的研发工作【SEAWALD 2000】。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。