



【摘要】:用于防抱死制动系统中的前轮转速传感器,也可以被用于汽车导航系统中的方向传感器。Li=RiθLe=Reθ而每个前轮的转弯半径可由下式表示,其中R是汽车后轮的转弯半径,L是前后两排车轮的轮距,K是同排车轮的间距。同样,对汽车每行驶一设定的距离计算出汽车转向角,从汽车第一次转向点开始,通过对全部转向角求算术和,则可计算出汽车到目前为止的方向改变量。
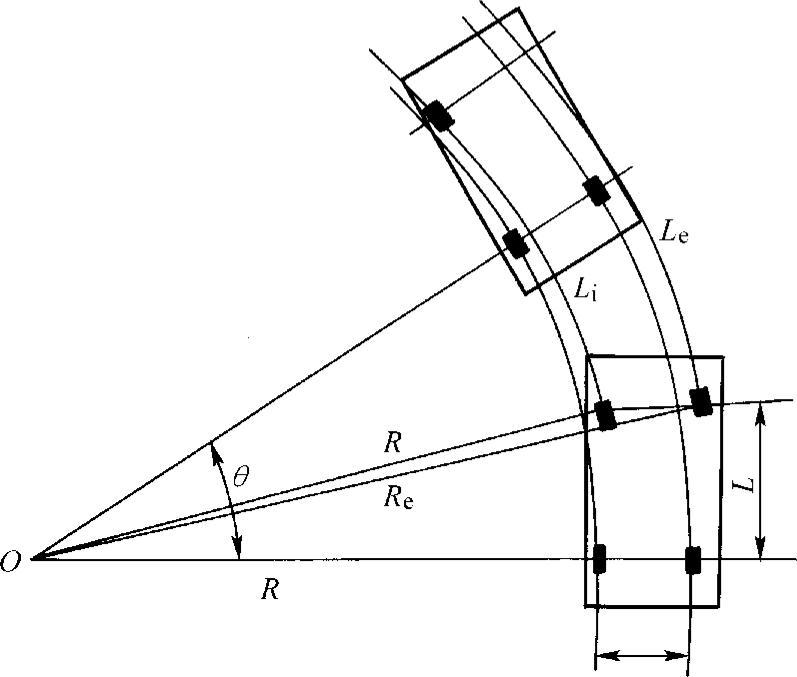
用于防抱死制动系统(ABS)中的前轮转速传感器,也可以被用于汽车导航系统中的方向传感器。通过对左、右前轮传感器输出的脉冲差(左、右前轮的行驶距离差)的测定,可计算出汽车是否已转向及方向的变化量。当汽车在以R为半径的圆弧上转动θ角度时,汽车的两个前转向轮均以相同的转动中心旋转。对于每个前轮所走过的路径(如图17-4所示)可以通过公式计算出来。两个前轮所走过的距离Li和Le因转弯半径的不同而不同,分别可用每个前轮的转弯半径Ri和Re来计算。
Li=Riθ
Le=Reθ
而每个前轮的转弯半径可由下式表示,其中R是汽车后轮的转弯半径,L是前后两排车轮的轮距,K是同排车轮的间距。


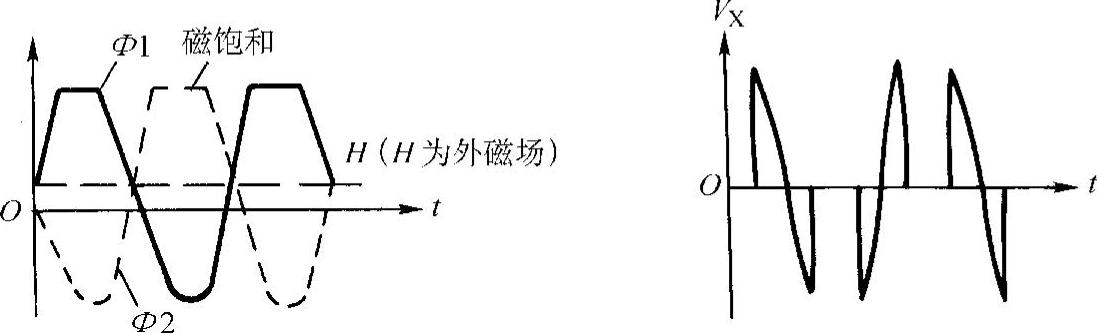
图17-3 罗盘传感器输出电压波形
 (https://www.xing528.com)
(https://www.xing528.com)
图17-4 汽车转向时每个车轮的行驶轨迹
取内外侧车轮所行走过的距离比为P,则有

通过对上述公式的变换可得

对汽车而言,前后车轮轮距L和车轮间距K值是一定值,这样只需通过计算前车轮内侧和外侧轮所行驶过的距离之比值P,即可得到后车轮的转弯半径R。相应地可采用下式计算出汽车转向角θ。
同样,对汽车每行驶一设定的距离计算出汽车转向角,从汽车第一次转向点开始,通过对全部转向角求算术和,则可计算出汽车到目前为止的方向改变量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。