



光电式转角传感器安装在转向轴管上,它用于检测转向盘的中间位置、转动方向、转动角度和转动速度。在电子控制悬架中,电子控制装置根据车速传感器信号和转角传感器信号,判断汽车转向时侧向力的大小,以控制车身的侧倾。
转向盘转角传感器用于检测汽车转向轮的偏转角度及偏转方向。在丰田轿车上装用的电子控制悬架系统TEMS上应用的光电式转角传感器,其安装位置和结构如图9-3所示。
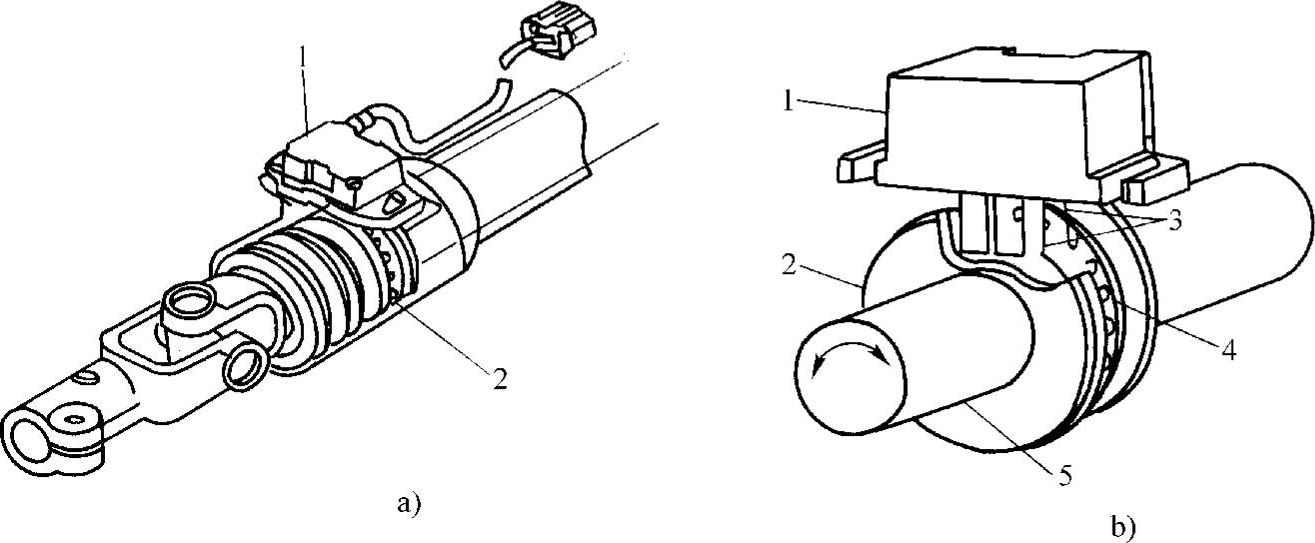
图9-3 转向盘转角传感器的安装位置和结构
a)安装位置 b)结构
1—转角传感器 2—传感器圆盘 3—遮光器 4—窄缝 5—转向轴
在压入转向轴的圆盘中间,装有带窄缝的圆盘,传感器的遮光器以2个为一组,从上面套装在窄缝圆盘之上。窄缝圆盘上等距离均匀排列着窄缝,窄缝圆盘随转向轴转动时,2个遮光器的输出端即可进行ON、OFF变换。光电式转角传感器的工作原理如图9-4所示。
转动转向盘时,窄缝圆盘随之转动,使遮光器之间的光束通/断变化,遮光器的这种反复开关动作产生与转向轴转角成一定比例的一系列数字信号,系统控制装置可根据该信号的变化来判断转向盘的转角和转速。同时,传感器在结构上采用两组光电耦合器,实现根据检测到的脉冲信号的相位差来判断转向盘的转动方向。图9-5为光电式转角传感器电路图。
根据图9-5说明光电式转角传感器的工作过程。图中的光敏晶体管在遮光盘的作用下,或者导通,或者截止,根据晶体管的导通、截止速度,可以检测出转向器的速度。在设计时使两个光电耦合元件(晶体管VT1和VT2)之间的导通与截止,相位差90°,根据先导通的脉冲信号可以检测出转向器的旋转方向。当汽车直线行驶时,如图9-6所示,信号A处于OFF状态(高电位)的中间位置。转向时,根据信号A下降沿处信号B的状态,即可判断出转向的方向,信号A由OFF状态变为ON状态(低电位)时,如果信号B为ON状态,则为左转向;如果信号B为OFF状态,则为右转向。(https://www.xing528.com)
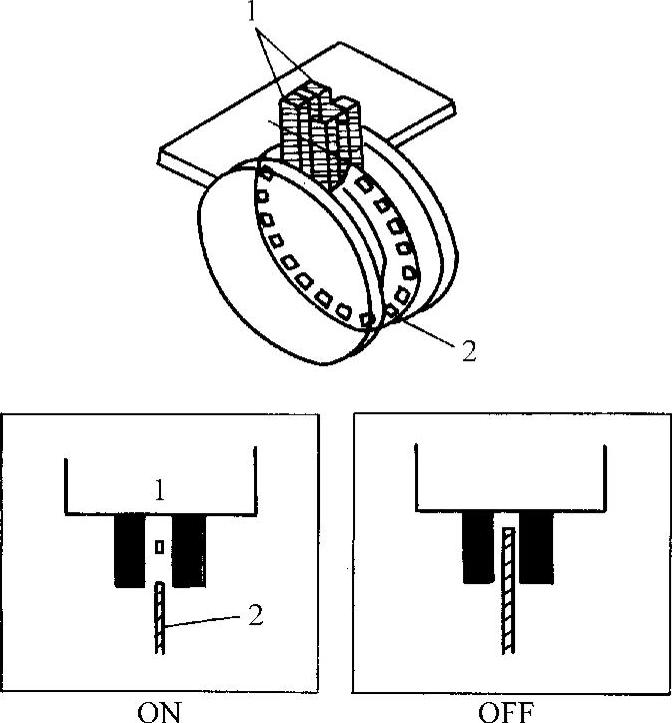
图9-4 光电式转角传感器的工作原理
1—遮光器 2—窄缝圆盘
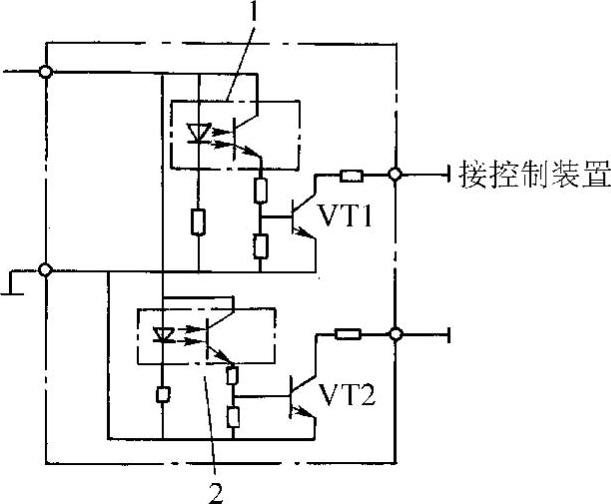
图9-5 光电式转角传感器电路
1—1号遮光器 2—2号遮光器
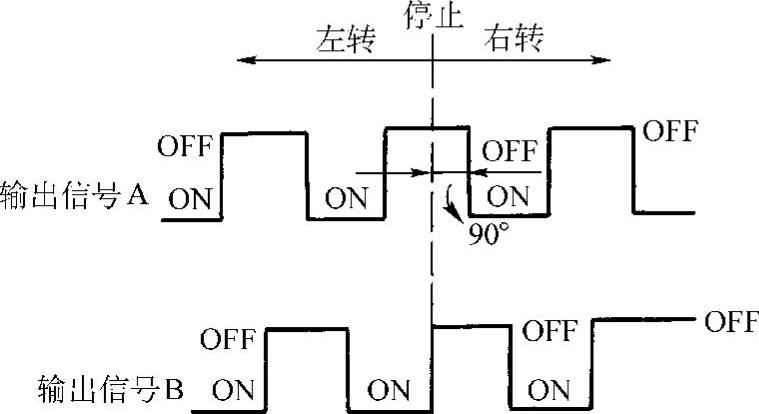
图9-6 光电耦合元件输出端的动作状态
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。