



混合动力牵引供电系统主要由燃料电池、超级电容、动力电池、单向DC/DC变流器、双向DC/DC变流器、能量管理控制器、牵引逆变器以及牵引电机组成.如图6—15所示。燃料电池、超级电容器与动力电池组成的复合电源,能够使动力电池能量密度较大和超级电容器功率密度较大的特点相结合,增强了混合电源的负载适应能力。而且,超级电容器与动力电池组成的复合储能装置不仅可实现无燃料电池状态下的紧急供电,亦可在电车制动阶段实现能量回收,降低了不必要的能量浪费,同时还具有节约成本、改善能源结构及无污染等特点。
该系统采用单向DC/DC变流器对燃料电池进行控制,采用双向DC/DC变流器对超级电容进行控制,双向DC/DC跟踪检测整车的运行状态以及超级电容箱、动力电池箱的容量情况,以调控其端电压使三者匹配工作。
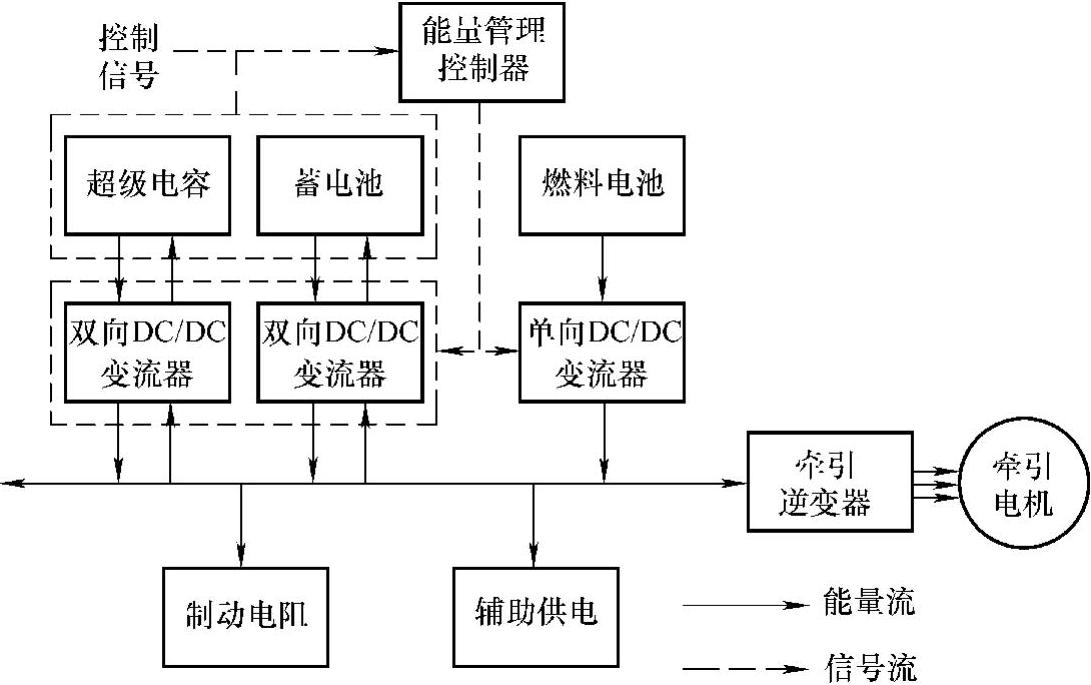
图6-15 燃料电池/超级电容/动力电池供电系统基本结构
基本控制策略如下:
(1)起动加速 如图6-16所示,当有轨电车起动时,起动燃料电池,同时利用双向DC/DC将超级电容投入系统。根据燃料电池响应要求,逐级提高燃料电池输出功率,需结合超级电容,利用其起动迅速、充放电快的特点,对车辆进行加速。
当燃料电池达到最大输出功率后,燃料电池与超级电容同时以最大功率输出,维持有轨电车的加速运行。按照有轨电车的牵引数据,此时有轨电车工作在恒功率区,有轨电车的燃料电池+超级电容总功率为773kW,恒转矩区与恒功率区转换点车速为30km/h,加速度为0.961m/s2。
当超级电容的SOC值低于期望值SOClo时,利用双向DC/DC变流器将动力电池组以最大输出功率投入系统。此时,燃料电池与动力电池同时以最大功率输出,超级电容继续放电,维持有轨电车的加速过程。此时车辆从恒功率区进入自然特性区,恒功率区与自然特性区的转换点车速为45km/h,加速度为0.601m/s2。
超级电容电量降低到保护电量,即超级电容SOC值降低到保护值SOCmin时,控制双向DC/DC变流器将超级电容切出系统。此时燃料电池与动力电池同时以最大功率输出维持有轨电车加速过程直到达到设计最高速度。结合有轨电车牵引数据,各单元功率与变流器总输入功率变化如图6-17所示。
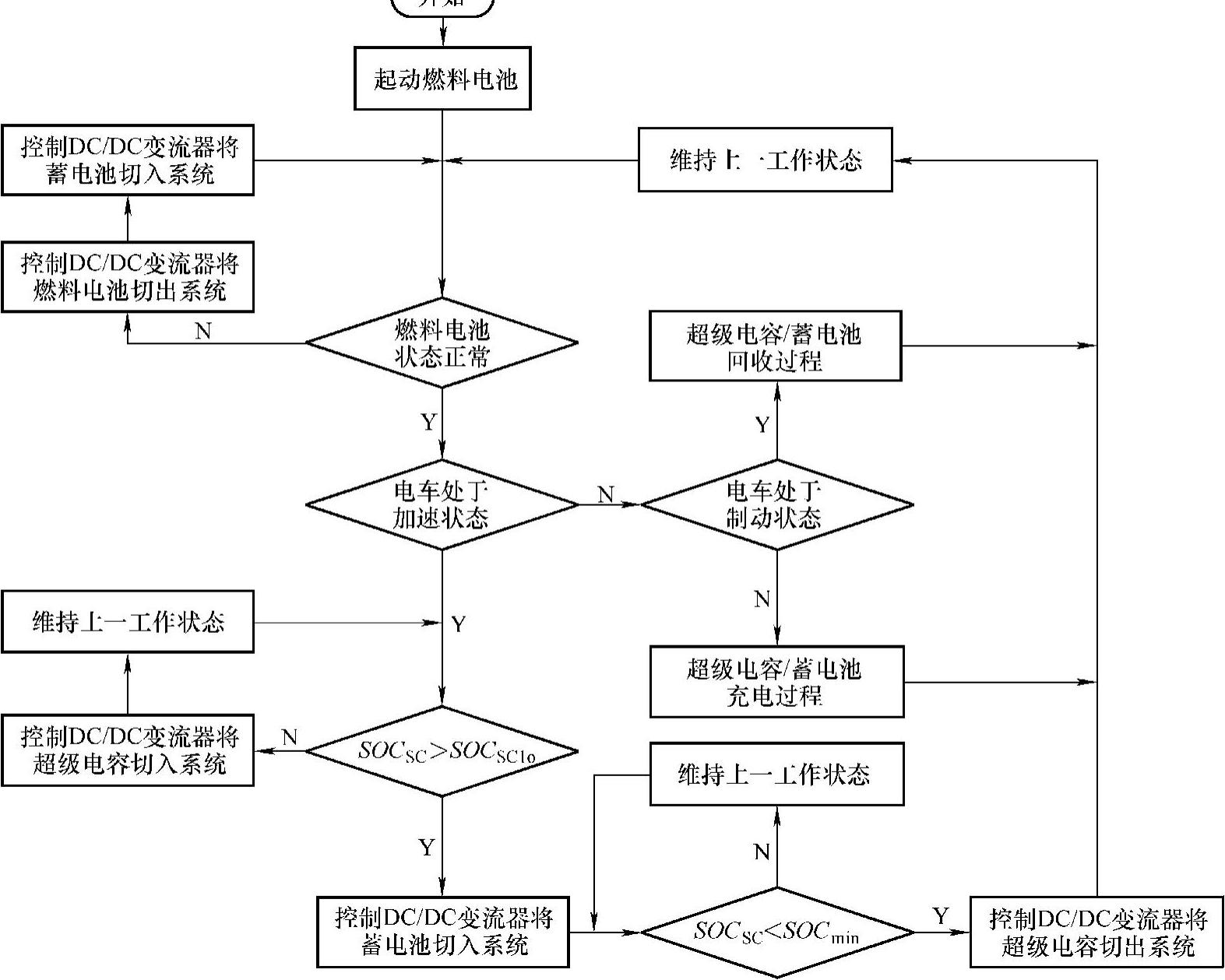
图6-16 燃料电池/超级电容/动力电池混合动力系统能量管理策略流程图
 (https://www.xing528.com)
(https://www.xing528.com)
图6-17 加速过程中各单元功率变化情况
(2)匀速行驶 当有轨电车正常以匀速行驶在轨道上时,混合动力系统由燃料电池提供能量,使牵引电机正常工作;同时,判断超级电容SOC值是否小于期望最大值SOCup,若SOC<SOCup,控制双向DC/DC变流器将超级电容投入系统中,使用燃料电池对超级电容进行充电,直到SOC≥SOCup,控制双向DC/DC变流器将超级电容切出系统。基本充放电流程如图6-18所示。
完成对超级电容的充电后,判断动力电池SOC值是否小于期望最大值SOCup,若SOC<SOCup,控制双向DC/DC变流器将动力电池投入系统中,使用燃料电池对动力电池进行充电,直到SOC≥SOCup,控制双向DC/DC变流器将动力电池切出系统。

图6-18 超级电容/动力电池充电流程
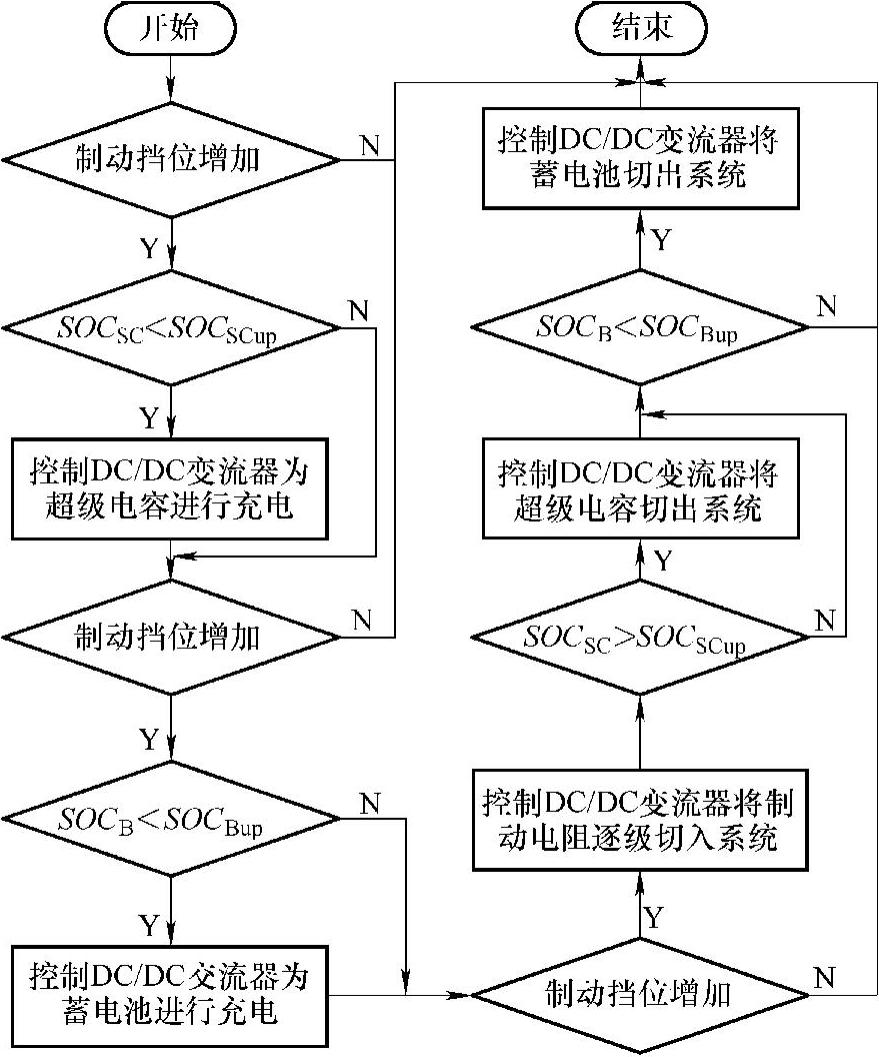
图6-19 超级电容/动力电池回收流程
(3)车辆制动 如图6-19所示,当车辆进行制动时,通过制动挡位输入信号、超级电容SOC值、动力电池SOC值,选择是否切入超级电容、动力电池和制动电阻。
当车辆开始制动,燃料电池停止对逆变器提供能量,转而只为辅助电源提供能量。同时,判断超级电容SOC值是否小于期望最大值SOCup,若SOC<SOCup,控制双向DC/DC变流器将超级电容投入系统中,使用超级电容回收车辆制动能;若此时制动挡位依然增加,判断动力电池SOC值是否小于期望最大值SOCup,若SOC<SOCup,控制双向DC/DC变流器将动力电池投入系统中,使用动力电池回收车辆制动能;当超级电容/动力电池的SOC值大于等于期望值,即SOC≥SOCup,控制双向DC/DC变流器将超级电容/动力电池切出系统。
当超级电容/动力电池均切入系统时,若此时制动挡位依然增加,则控制单向DC/DC变流器将制动电阻逐级切入系统,消耗制动能。若超级电容/动力电池切出系统后车辆仍未完全停下,起动机械制动系统辅助制动。
(4)应急牵引 当燃料电池发生故障无法为混合动力系统提供能量时,利用断路器将燃料电池切出系统,同时控制双向DC/DC变流器将动力电池切入系统。此时,由动力电池单独为混合动力系统提供能量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。