



在所设计的硬件平台的基础上,完成了控制系统软件设计。根据前面几章对控制框图和控制算法的描述,控制系统主要实现以下功能:电机位置的检测和转速的计算;电流的A-D采样和处理;速度外环、电流内环控制算法的实现;SVPWM控制信号的产生。实验系统的软件主要包括主程序、CPA3捕获中断程序、T1下溢中断处理程序以及故障保护中断程序四个部分。
1)主程序主要完成系统和各功能模块的初始化,在整个程序执行期间仅执行一次。初始化完成后程序进入循环等待,直到有请求时,响应并执行相应的中断服务子程序,中断完成后继续等待。主程序流程图如图6-43所示,其中系统初始化模块包括所有变量的定义、寄存器参数设置、中断向量表初始化、I/O初始化、定时器设置、事件管理器初始化和A-D初始化等。
2)CAP3捕获中断程序等待直到光电编码器的Z脉冲上升沿出现时,立即执行中断。电机每转一圈,将产生一个Z脉冲,就会进行一次捕获中断处理,并会对电机的零位置角进行更新。捕获中断程序流程图如图6-44所示。
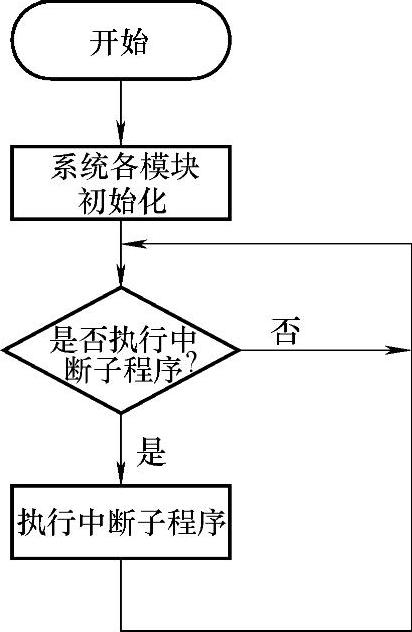
图6-43 主程序流程图
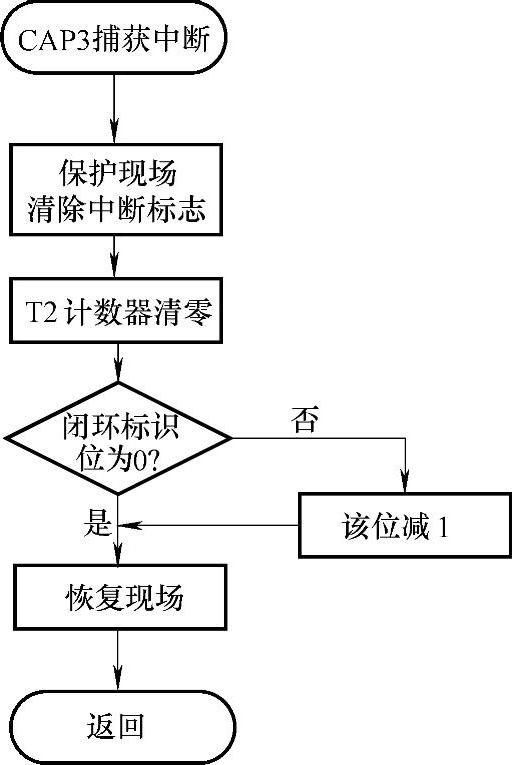
图6-44 CAP3捕获中断流程图
3)T1下溢中断处理程序是整个控制系统功能实现的核心程序,在每个PWM周期都要执行一次。在程序编写时设定速度环的周期是电流环的10倍,即每经过10个PWM周期进行一次速度环的调节。判断系统是否进入闭环的控制,是因为电机起动时,转子的位置是未知的,即不能得到坐标变换需要的转子位置角。于是在开环状态下对电机进行霍尔起动,当电机转动一周后利用光电编码器的零位校正信号即Z脉冲信号便可得到精确的转子位置,进入闭环控制。其程序流程图如图6-45所示。
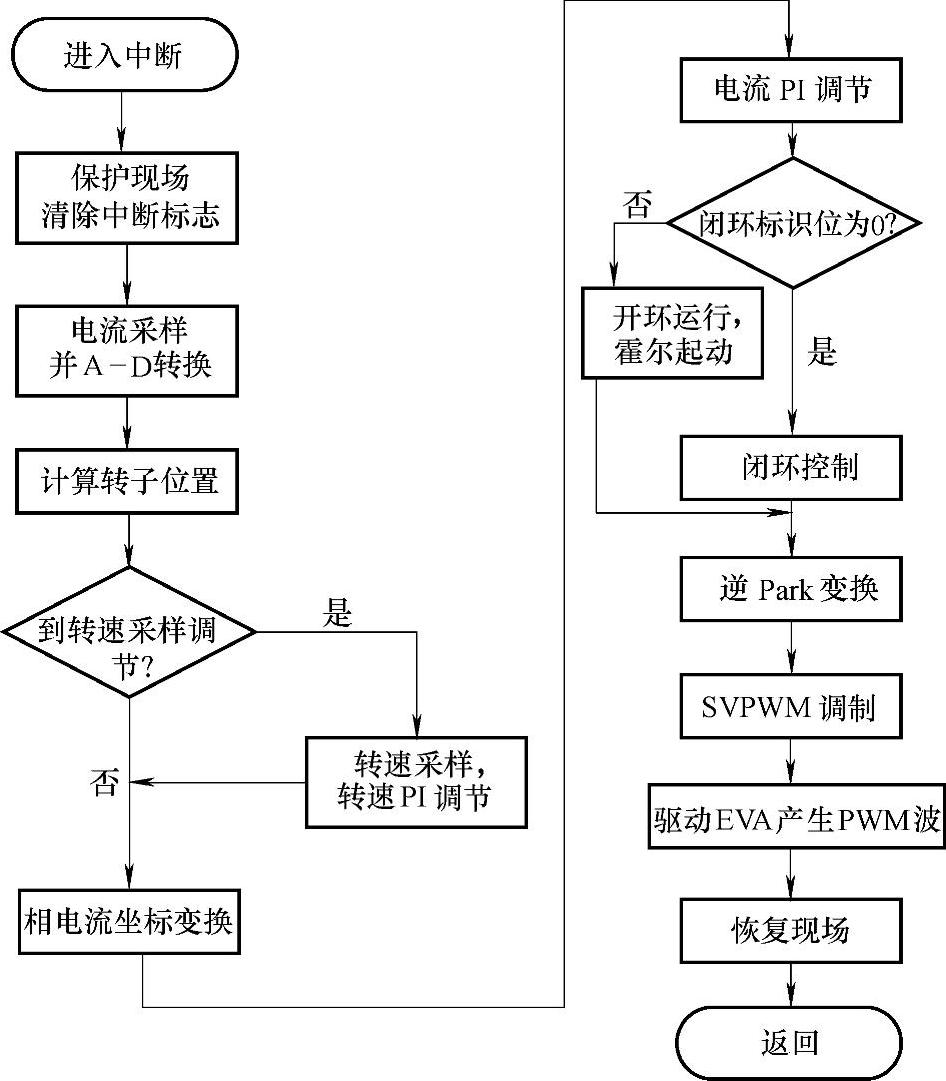
图6-45 T1下溢中断处理程序流程图
4)故障保护中断程序主要包括过电压引起的过电压保护,过电流引起的过电流保护,欠电压引起的欠电压保护以及对IPM的过热保护。故障发生时,该中断程序可以切断PWM脉冲输出,停止系统工作,进行保护。图6-46所示为该程序流程图。(https://www.xing528.com)
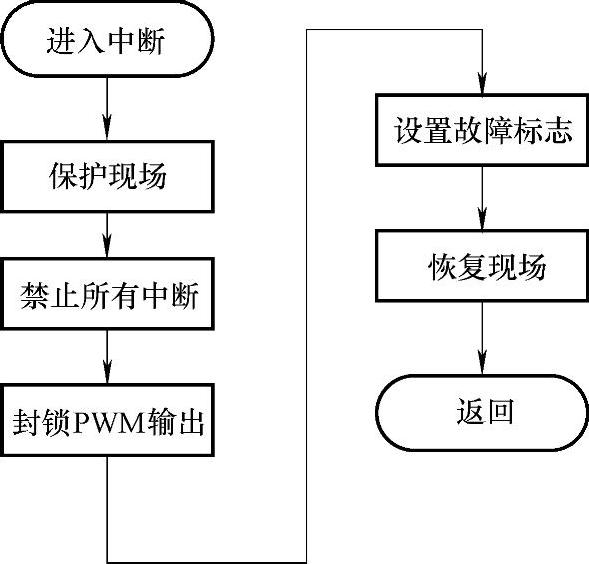
图6-46 故障保护中断程序流程图
整体软件程序流程图如图6-47和图6-48所示。其中,图6-47所示为控制系统初始化和系统整体控制流程;图6-48所示为永磁同步电机调速控制及相应控制
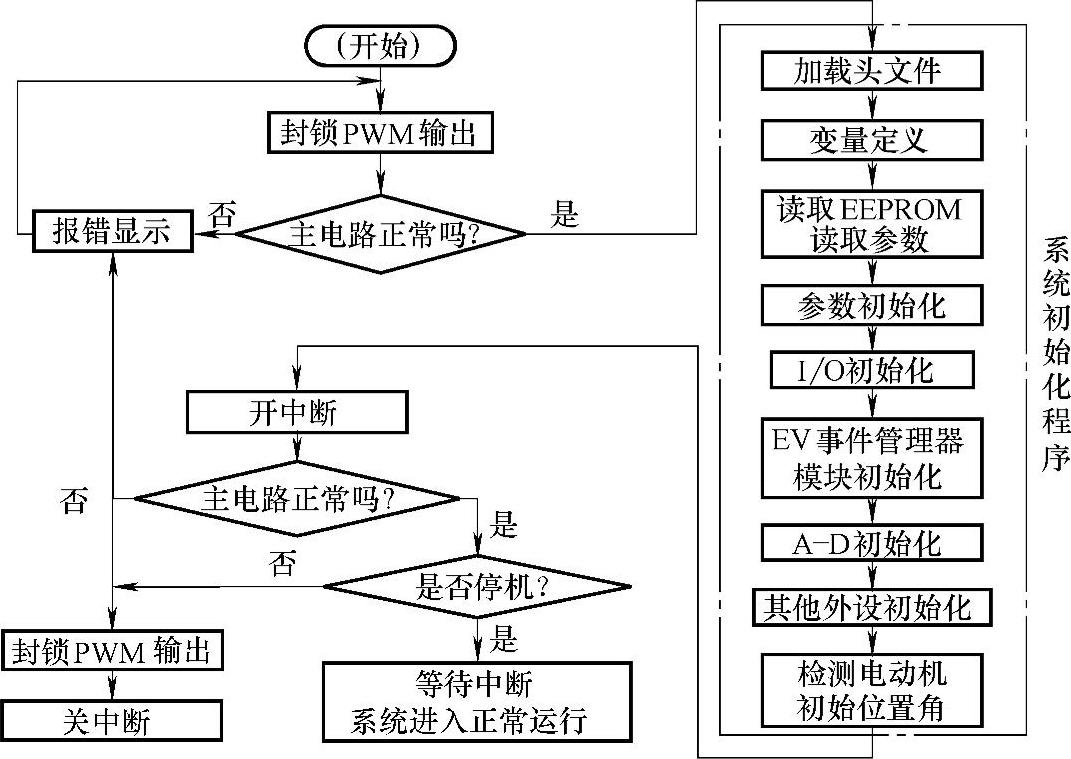
图6-47 控制系统的整体程序流程
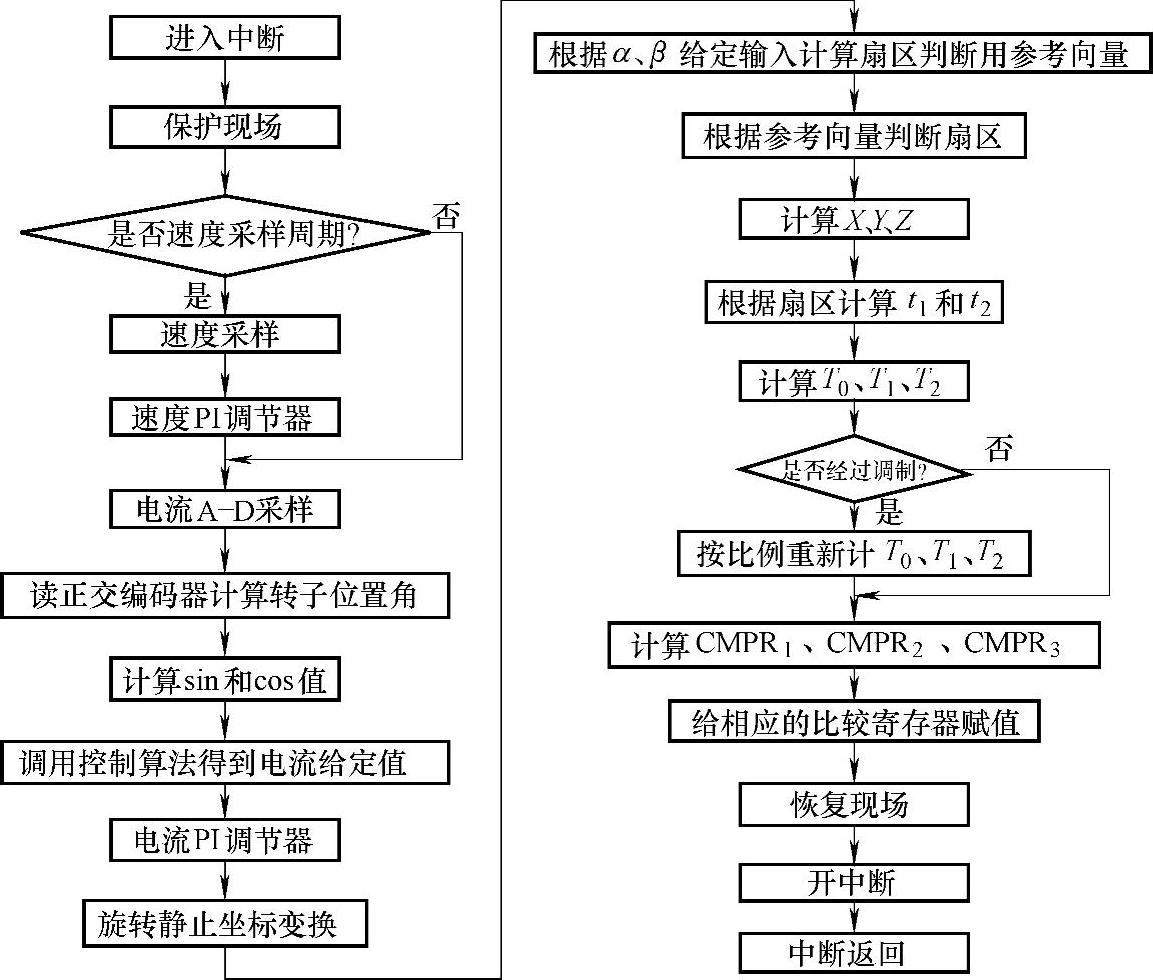
图6-48 内置式永磁电机控制算法流程
算法流程,其中包括电流矢量给定算法、解耦算法和SVPWM算法。
系统调节器均采用软件实现的数字调节器,不但可以减少系统硬件体积和成本而且精度高、易于调节。系统软件主要采用C语言编写,必要的地方穿插汇编语言和引用TI公司提供的汇编语言函数,从而提高软件的执行效率。逆变器开关频率选为12kHz,即电流环调节频率为12kHz。由于转子惯性的作用,转速环节的变化要远远小于电流环节,因此,转速环节调节频率取电流环调节频率的1/10。因为本设计中电流环节调节频率为12kHz,因此转速环节采用1.2kHz调节频率进行调节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。