



这里设计的车用永磁同步电机驱动系统的硬件构成主要包括主电路和控制电路两部分。主电路部分包含整流逆变电路、IPM集成电路、电流采样调理电路、位置速度检测电路、过电压过电流保护电路等,控制电路部分采用TMS320F2812芯片作为控制核心,包含控制板和键盘显示板。其系统构成如图6-39所示。
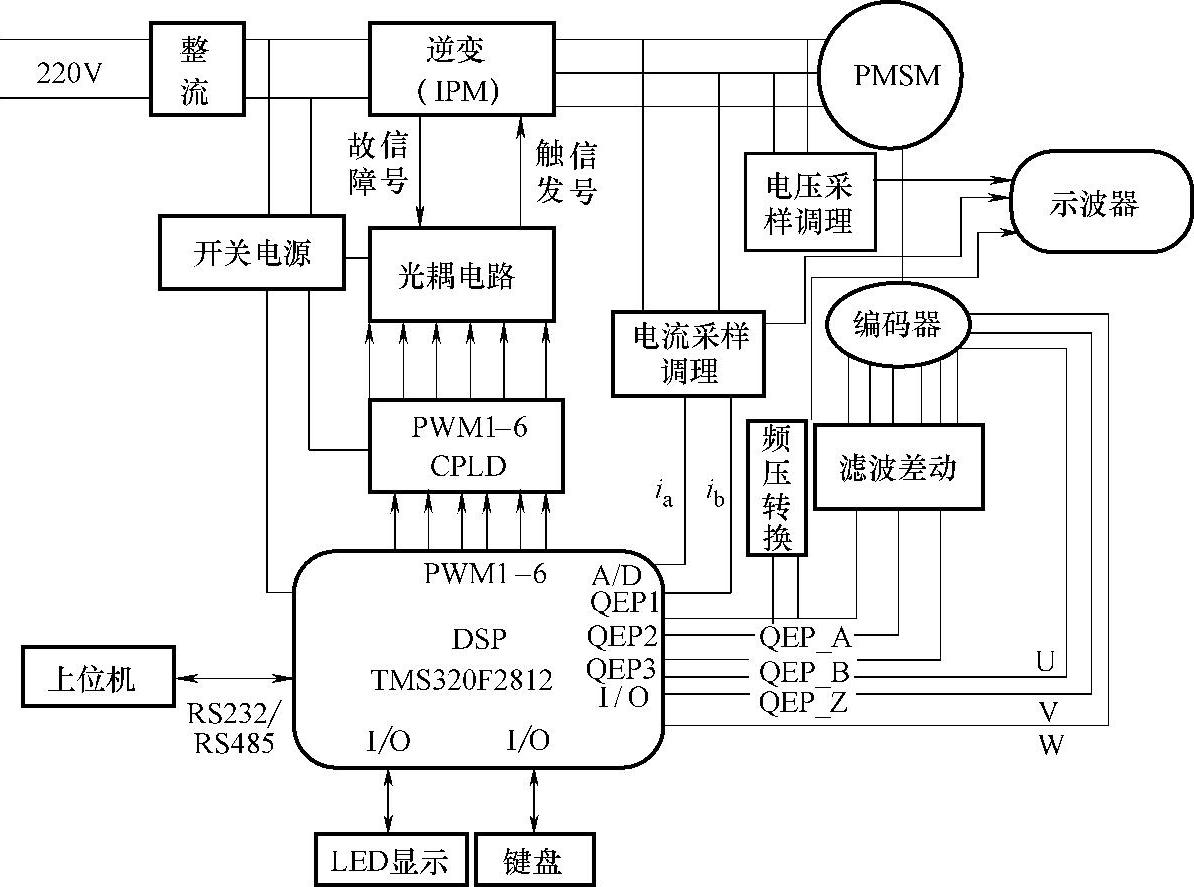
图6-39 控制系统硬件构成框图
A.主电路硬件组成部分作用如下。
1.电源电路
电源电路分为整流环节和逆变环节。整流环节通过功率二极管的整流、滤波将来自电网的单相220V交流电变为310V的直流母线电压。逆变环节采用由高速低功耗的IGBT和优化的栅极驱动电路组成的IPM智能功率模块将得到的直流母线电压逆变为特定的交流电,供给永磁同步电机使用。IPM模块内部不仅将IGBT及其驱动电路进行了集成,并且具有过电流、过热保护电路,这就避免了负载短路或过热故障发生时对系统造成的损坏。整流得到的直流电源还作为开关电源的供电电源,经过开关电源输出的各种电压等级的直流电,提供给各个芯片使用。
2.电流采样调理电路
对电机转速的控制实质是对转矩的控制,而转矩控制要通过电流控制来实现,所以精确的电流检测对电机性能的实现尤为重要。控制系统中利用电流霍尔传感器实时检测电机的两相电流ia、ib(定子绕组 形连接,三相电流之和为零,故测两相即可),并将其输送到DSP的A-D转换模块中。由于电流传感器测量得到的信号会含有很多的高频分量,所以输送到DSP之前还要进行滤波处理。
形连接,三相电流之和为零,故测两相即可),并将其输送到DSP的A-D转换模块中。由于电流传感器测量得到的信号会含有很多的高频分量,所以输送到DSP之前还要进行滤波处理。
3.位置和速度检测电路将光电编码器实时输出的六路脉冲信号(A、B、Z、 、
、 、
、 )经过滤波、差动处理后得到QEP_A、QEP_B和QEP_Z三路脉冲信号,输入到DSP的正交编码脉冲模块QEP中,经计算便可得到转子位置和速度等信号。此外,根据光电编码器输出的初始位置差分脉冲信号U+、U-、V+、V-、W+、W-电平的高低组合关系还能够对磁极位置进行初判,来确定电机转子的初始位置。
)经过滤波、差动处理后得到QEP_A、QEP_B和QEP_Z三路脉冲信号,输入到DSP的正交编码脉冲模块QEP中,经计算便可得到转子位置和速度等信号。此外,根据光电编码器输出的初始位置差分脉冲信号U+、U-、V+、V-、W+、W-电平的高低组合关系还能够对磁极位置进行初判,来确定电机转子的初始位置。
4.DSP芯片
TMS320F2812芯片能够对键盘的输入指令或上位机设定的运行命令如起动、运行速度、停止等进行处理,并可根据霍尔电流传感器和光电编码器的测量数据实时检测电机的电流和转子位置、速度等信息。根据控制算法的需要输出PWM信号给CPLD。
5.CPLD芯片
控制系统中加入了CPLD芯片来提高DSP中发出的PWM信号的驱动能力,并将六路PWM信号送入六路具有强弱电隔离功能的高速光耦合器中。CPLD的另一个重要功能是处理故障信号,并做出相应处理。这些故障信号包括过电压、欠电压保护,IPM模块的过电流、短路和过热保护,PWM信号的直通保护。当CPLD检测到这些故障信号时,会立即切断PWM信号的输出,同时发出使光耦合器停止工作的控制信号,有效保护了控制系统的安全。此外,CPLD还可以根据控制的需要完成一些特定的运算,来减轻DSP的运算压力。
6.其他外围设备
其他外围设备包括上位机、键盘和LED显示单元等。上位机通过RS232和RS485通信接口向DSP发出指令,并能够将得到的电流、转速等反馈信息图形化显示。键盘也能够对电机的起停等运行参数进行设定。LED显示单元可将电机转速以数字的形式实时显示出来,示波器可以对关心的变量如PWM波、电压、电流等进行实时观测。
B.控制电路主要采用TMS320F2812芯片作为控制核心,其主要由主控制电路和功率驱动电路两大部分组成,并包含控制板和键盘显示板。(https://www.xing528.com)
1.主控制电路
主控制电路主要由主控制芯片、采样电路和显示键盘接口电路等组成。主控芯片即采用TI公司生产的电机控制适用DSP芯片TMS320F2812[8]。主控电路主要完成模拟指令的接收转换,电机定子电流的A/D采样,转速、转子位置的计算,复杂控制算法的实现、PWM信号的产生、故障信号的处理以及与串行外设和显示电路的通信控制。主控制电路框图如图6-40所示。
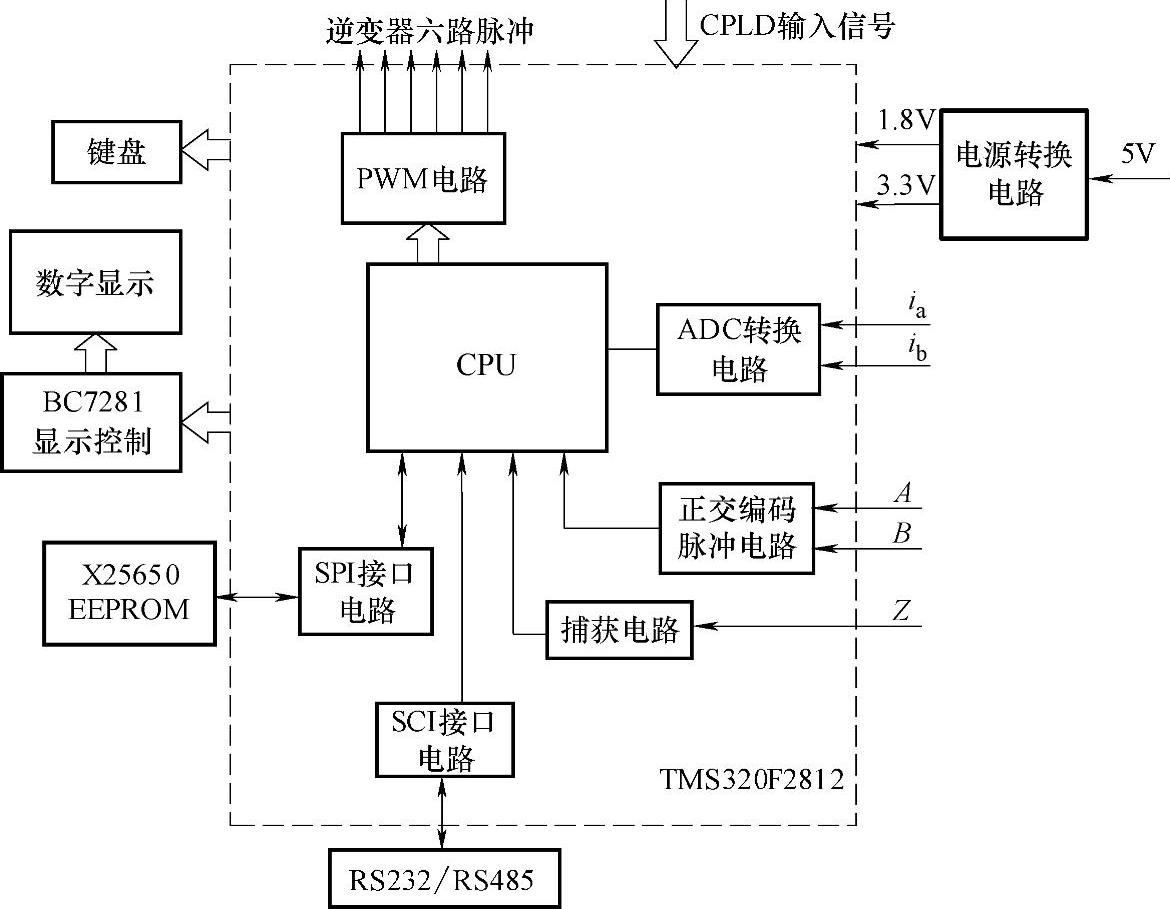
图6-40 主控制电路框图
显示采用BC7281显示控制芯片驱动控制的数码管作为显示单元,通过普通口实现驱动控制芯片与DSP的通信,键盘亦通过I/O直接扩展实现。另外,为了实现参数的存储,通过SPI通信接口外扩时钟频率5MHz的SPI接口的EEPROM,实现参数存储。
2.功率驱动电路
功率驱动部分包括整流、逆变、驱动、软启动、制动、电源等电路,以及为了保证系统安全可靠地工作的过电压、欠电压、过电流、过热等故障保护电路。
逆变电路采用IGBT集成模块电路,通过外部专门的驱动芯片来驱动其门极实现。整流电路采用IGBT集成模块上带有的不可控整流电路实现,以减少功率驱动电路尺寸。
电路故障信号的监测采用CPLD(复杂可编程序逻辑器件)来实现。CPLD芯片上有丰富的组合资源,且其在出厂前都是经过严格测试的芯片,因此不需要开发人员承担风险,其编程语言VHDL易学易用,可使得开发人员在很短的时间内完成开发工作,有效缩短系统开发周期。功率驱动电路的结构图如图6-41所示。
根据上述设计,制作完成了一套永磁同步电机控制系统的硬件电路板。硬件电路板实物图如图6-42所示。
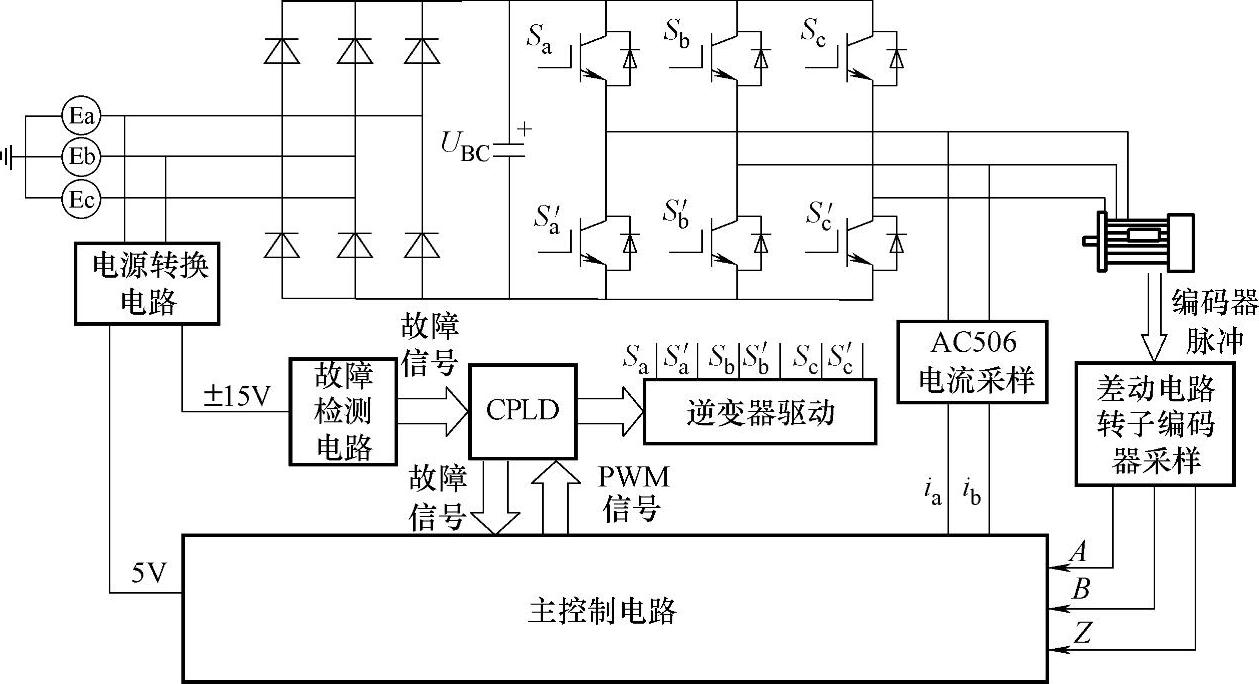
图6-41 功率驱动电路的结构图
实验系统的工作原理如下:整流模块将220V的交流市电转换为310V的直流电,并进行稳压处理。经过稳压的直流电一方面送到IPM逆变为永磁电机所需的特定交流电,另一方面供开关电源模块变换为24V、5V、3.3V、1.8V等电压供相应芯片使用。光电编码器产生的六路A、B、Z、 、
、 、
、 信号经过差分和滤波处理分别送到QEP/CAP模块中来实时检测电机的位置,并计算出电机的转速。其中,A、B两路信号相位互差90°,送到EVA的正交编码单元可以用于电机旋转方向的判断,并能够根据两者的关系计算转速;Z脉冲每周产生一次,可用于角度修正。光电编码器中的霍尔信号U、V、W送到DSP芯片的I/O口,对电机位置进行初判,解决了电机起动困难的问题。霍尔电流传感器检测电机的相电流送到DSP芯片的A-D转换接口,得到的数字电流经过Clark变换、Park变换以及控制算法的作用,计算出PWM波的占空比,并将六路PWM脉冲送入CPLD芯片中。CPLD判断系统的工作状态和检测故障信号,在保证安全的情况下,经过高速光耦合器把增强的PWM脉冲送入IPM逆变模块中。IPM根据脉冲的情况控制IGBT功率开关,从而得到电机运行所需的特定电流,保证电机平稳可靠地运行。
信号经过差分和滤波处理分别送到QEP/CAP模块中来实时检测电机的位置,并计算出电机的转速。其中,A、B两路信号相位互差90°,送到EVA的正交编码单元可以用于电机旋转方向的判断,并能够根据两者的关系计算转速;Z脉冲每周产生一次,可用于角度修正。光电编码器中的霍尔信号U、V、W送到DSP芯片的I/O口,对电机位置进行初判,解决了电机起动困难的问题。霍尔电流传感器检测电机的相电流送到DSP芯片的A-D转换接口,得到的数字电流经过Clark变换、Park变换以及控制算法的作用,计算出PWM波的占空比,并将六路PWM脉冲送入CPLD芯片中。CPLD判断系统的工作状态和检测故障信号,在保证安全的情况下,经过高速光耦合器把增强的PWM脉冲送入IPM逆变模块中。IPM根据脉冲的情况控制IGBT功率开关,从而得到电机运行所需的特定电流,保证电机平稳可靠地运行。
图6-42 硬件电路板实物图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。