



永磁同步电机是一个非线性、强耦合、参数时变的系统,为了克服参数不准确造成的控制性能下降,提出了一种在线参数估计模型,该模型能准确辨识不同工况下内置式永磁电机的非线性电感参数,将其应用在电流控制策略和解耦控制算法中,使IPMSM模型线性化,实现了电流响应的快速性和无静差调节,有效地提高了完全依赖参数精度的驱动控制系统的性能。
电机参数估计技术一般分离线估计和在线估计。离线估计技术是通过特定的实验数据,建立输入和输出测量信号之间的联系;在线估计技术需结合控制器利用各种观测器、自适应、卡尔曼滤波和神经网络等算法进行参数辨识。准确估计电机模型的参数是相当困难的,算法需权衡考虑烦琐性、收敛性和计算时间等各个方面,并且用于辨识的电机数学模型要非常精确,以提高参数估计精度[7]。
控制算法中的参数准确性是提高控制系统性能的必要条件。电机在运行过程中,受负载变化、温度变化、磁路饱和及老化等因素的影响,电机参数是时变的。为了得到良好的动态性能,需要对电机参数进行实时估计。因此,提出了一种在线参数估计模型,该模型可以在线获取不同工况下IPMSM的时变参数,将其应用在最大转矩每安培电流控制、弱磁控制和解耦控制算法中,以提高系统的控制性能,其系统框图如图6-35所示。由于电机直轴气隙较大,电感受饱和影响不严重,在控制系统中假设d轴电感为常数。电机给定转速n=1000r/min,负载转矩每隔0.1s在5N·m与15N·m之间阶跃,在线参数估计模型辨识出的q轴电感随负载及电流的变化波形图如图6-36所示。电机输出转矩和电流Iq是正比关系,在给定转矩做阶跃变化时,电流Iq随着给定转矩的变化而变化,从而使电磁转矩跟随给定转矩。电流Iq的变化使电感Lq发生非线性变化,但是当电磁转矩稳定后,q轴电流亦趋于稳定,电感Lq也随之稳定在某一值。电感参数在线估计模型在控制系统中能很好地实时跟随电机内部电感参数的变化,从而得到更精确的电机电感参数。
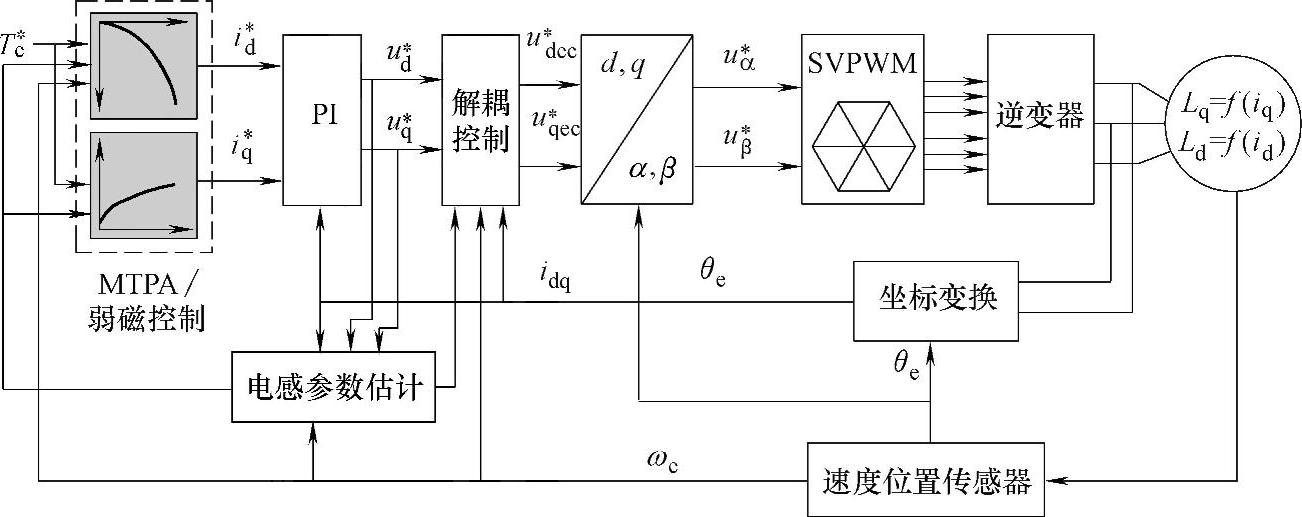
图6-35 在线参数估计模型补偿饱和影响的控制系统框图
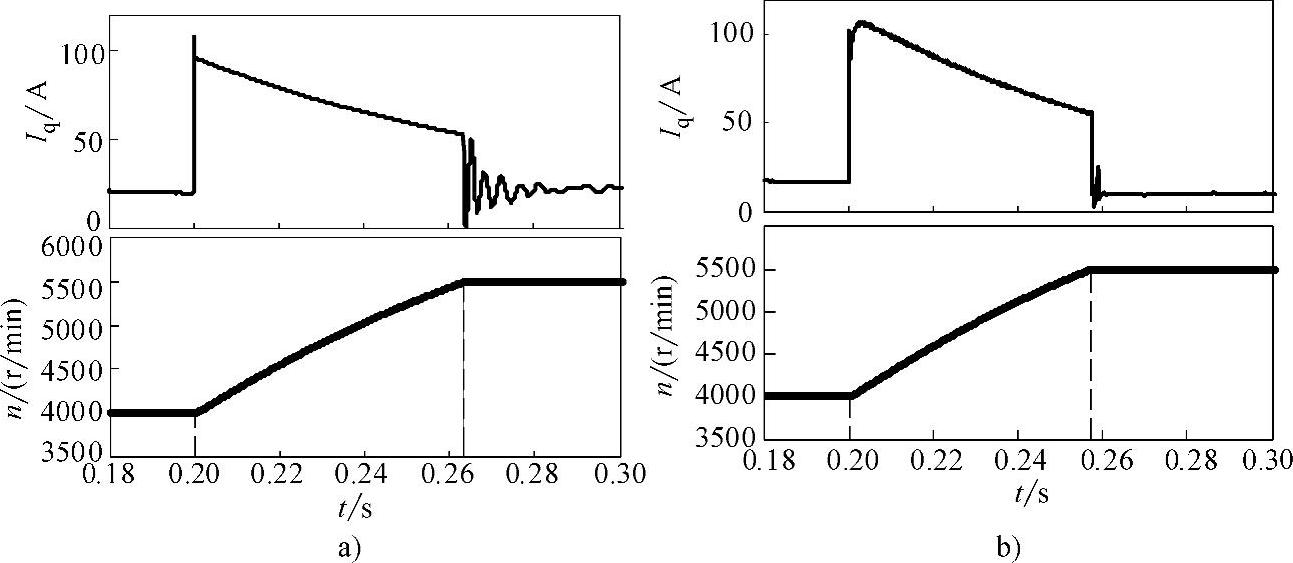
在恒功率区,受电流圆的限制q轴电流因去磁电流增加而减少,磁路饱和不严重甚至退出饱和区,q轴电感增加造成不考虑磁路饱和影响控制系统中的电压控制器饱和,当转速阶跃上升到给定转速瞬间,磁路饱和的影响使q轴电流振荡,动态性能差,控制系统不稳定,如图6-37a所示。在不同运行区域及负载变化的情况下电机饱和程度不同,电流响应动态特性很差,因此,对磁路饱和的影响进行补偿以提高控制性能尤为重要。在线估计模型辨识出的时变参数电感应用在控制算法中可以有效地消除恒值电感参数带来的系统不稳定、电机固有特性输出的
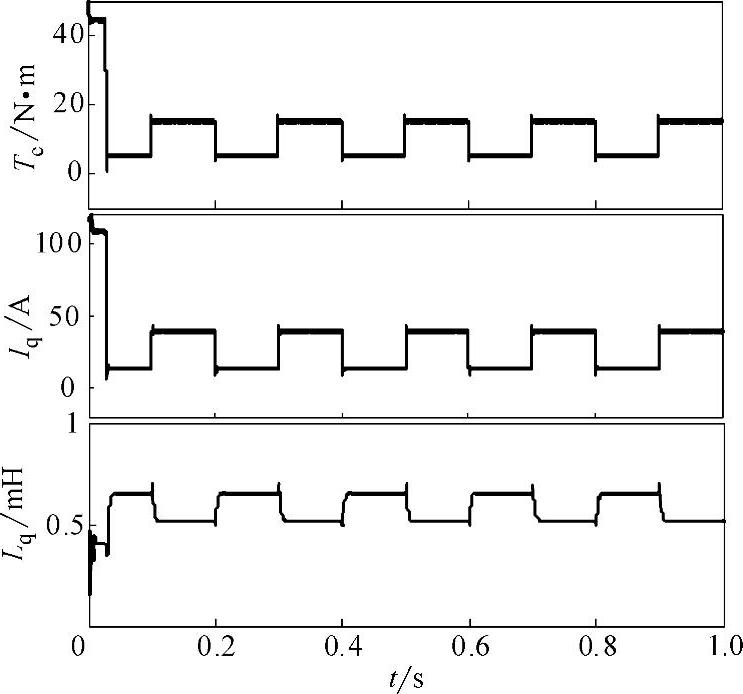
图6-36 电磁转矩、电流和在线估计电感参数跟随给定变化的波形
 (https://www.xing528.com)
(https://www.xing528.com)
图6-37 恒功率区磁路饱和补偿的电流瞬态响应
a)不考虑磁路饱和补偿 b)考虑磁路饱和补偿
不精确等一些难题,如图6-37b所示。两个系统的转速在0.2s时刻同时阶跃,不考虑磁路饱和的系统在0.26s时刻后上升到给定转速,而采用在线参数估计模型的控制系统在0.26s之前达到给定转速,提高了系统的动态性能和响应速度。
为了分析磁路饱和对电机控制系统的影响,对考虑磁路饱和补偿与不考虑磁路饱和补偿的控制系统仿真结果进行比较。图6-38所示为电机负载起动T1=5N·m,经0.56s稳定运行在给定转速n=2000r/min,在t=0.2s时转速从n=2000r/min阶跃到n=4000r/min,普通模型速度经较长的时间达到给定转速n=4000r/min,且超调较大,如图6-38a所示,而在线参数估计模型控制系统超调量小于0.1%,且比普通模型起动时间少0.01s,起动速度快,稳定性好。采用在线参数估计模型的控制系统提高了弱磁区电机的转矩输出,负载扰动时电压控制器快速调整转矩脉动,动态性能好,抗干扰能力强,鲁棒性好,如图6-38b所示。
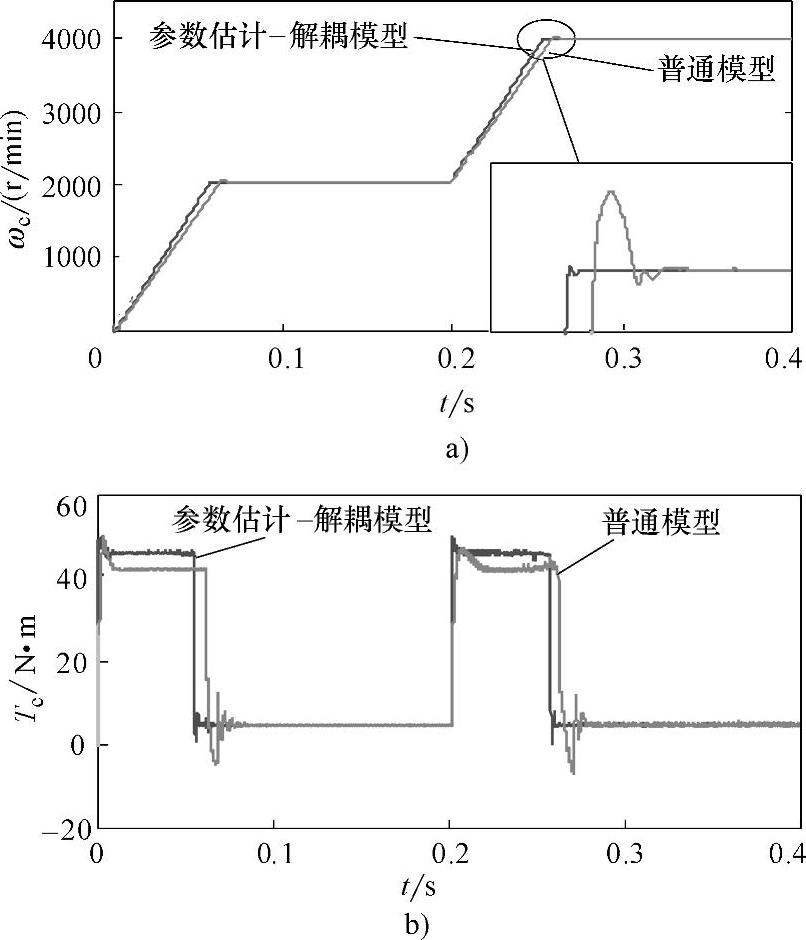
图6-38 在线参数估计补偿磁路饱和的电机输出特性比较
a)速度比较波形图 b)转矩比较波形图
结果表明,采用在线参数估计模型的驱动控制系统能平滑地实现恒转矩区与恒功率区之间的过渡,有效改善了恒功率区电压控制器饱和造成的控制系统不稳定性,使得机端电压能准确跟踪给定电压,拓展了恒功率区速度范围,增加了转矩输出能力,提高了控制系统的快速性、精确性和鲁棒性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。