



不考虑磁路饱和影响的内置式永磁同步电机驱动控制系统框图如图6-22所示,它是典型的双闭环调速系统。根据系统框图,利用Matlab软件建立永磁同步电机控制系统仿真模型,主要包括速度PI控制、电流PI控制、电流解耦模块、驱动SVPWM模块、坐标变换和具有磁路饱和特性的内置式永磁同步电机模型。
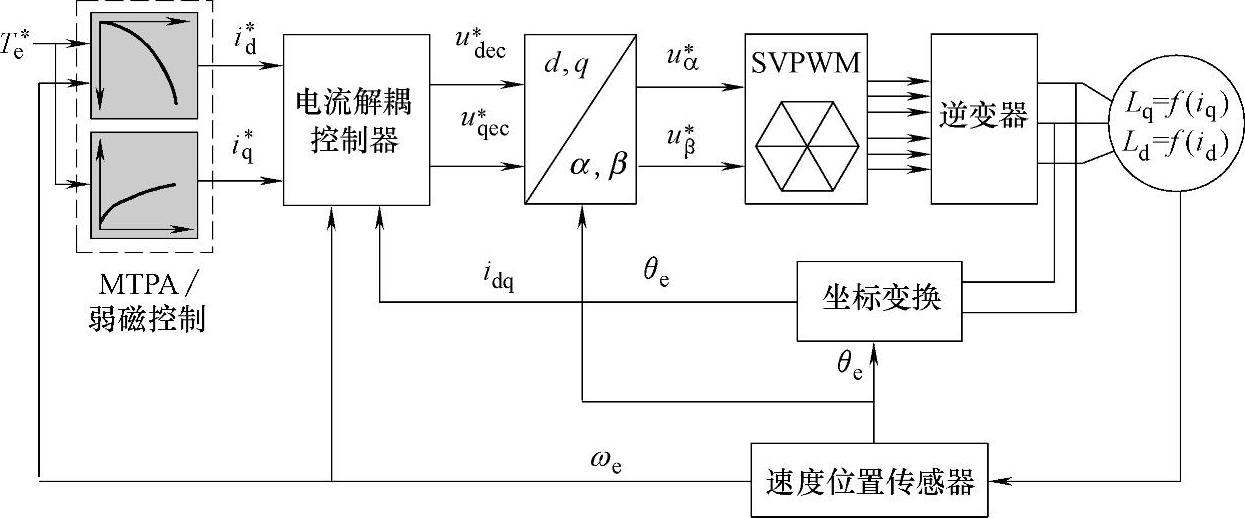
图6-22 没有考虑磁路饱和影响的系统框图
内置式永磁同步电机模型的简化和其反电动势的耦合等多种因素影响电流控制的响应速度和动态性能,消除反电动势耦合影响一般采用电压前馈的方法,即利用转速实现反电动势前馈解耦控制,提高了控制模型的动态性能。带有解耦控制的电压主要有两部分,一部分是由电压控制器(PI)输出的电压,另一部分是反电动势补偿的电压。电机参数如表6-1所示。
在控制系统中加入解耦模块,消除了反电动势之间耦合,使IPMSM模型线性化。电机在负载转矩为20N·m时起动,经0.2s后达到给定转速n=4000r/min后,电机负载运行稳定,速度波形图如图6-23所示。在t=0.35s时刻,负载转矩下降至8N·m,如图6-24所示,转速超调0.2%,经平稳后运行在4003r/min,其速度存在较大静差,且转矩波动较为严重,稳态特性差。A相相电流波形图如图6-25所示。

图6-23 不考虑饱和影响的速度波形图
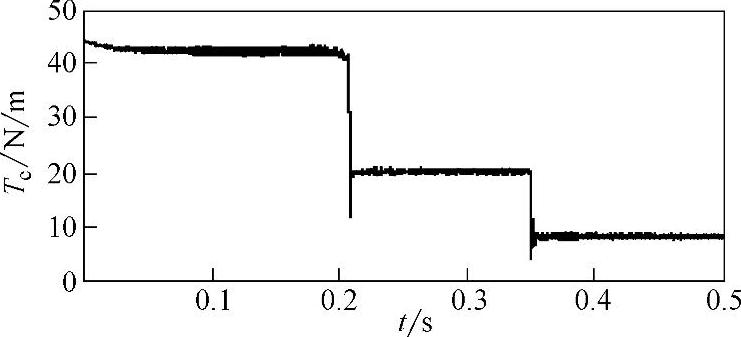
图6-24 不考虑饱和影响的转矩波形图(https://www.xing528.com)
电流控制算法、解耦控制中所采用的电机参数均为常数,使得控制性能不理想。随着转速的增加和负载的不同,电机的饱和作用影响电感参数值,电机时变的电感参数与控制算法中的常数电感不一致。当电机进入弱磁区后,去磁电流使励磁磁场减弱,电机退出饱和,交直轴电感均受影响,尤其是q轴电感值变化很大。电机饱和作用会对控制系统带来不稳定的影响,尤其在高速弱磁区,q轴电感为恒定值,当电流指令变化较大时,由于电机和逆变器的容量有限,会使得机端电压超过极限值,PI控制器的输出产生电压饱和现象,电流波动大,控制系统不稳定,分别如图6-26和图6-27所示。
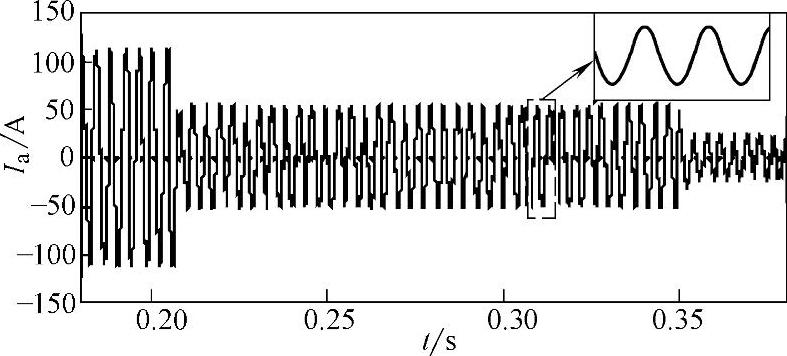
图6-25 不考虑饱和影响的定子A相电流波形图
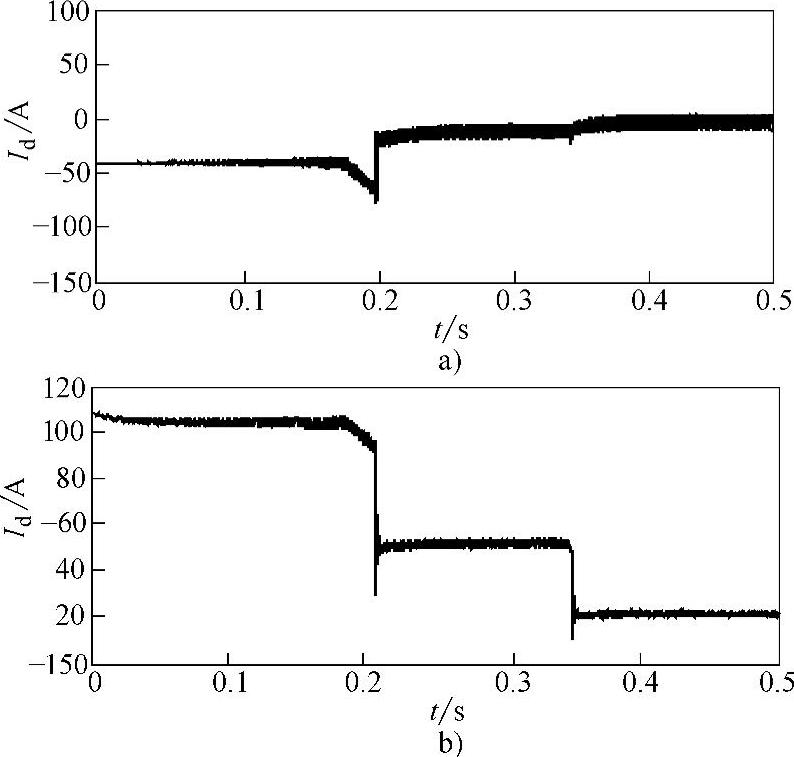
图6-26 不考虑饱和影响的dq轴电流波形图
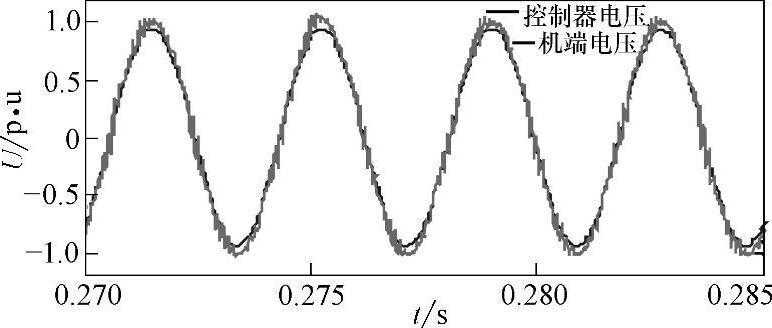
图6-27 不考虑饱和影响的控制器电压与机端电压波形比较图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。