



基于上述的系统控制框图和矢量控制算法,利用Matlab/Simulink软件建立系统仿真模型。系统仿真参数可分为电机基本参数和控制系统参数,分别如表6-1和表6-2所示。
表6-1 电机基本参数

表6-2 控制系统参数

电机的电感参数采用二维的非线性电感参数,根据上述建立的仿真模型对控制系统进行仿真,仿真结果如图6-15~图6-19所示。图6-15所示为采用上述考虑饱和和交叉耦合,与不考虑时,控制系统转矩—速度输出特性曲线对比图。从图中可以看出,采用考虑饱和和交叉耦合的控制方式可以有效地提高电机高速时转矩输出能力,从而提高电机的最高运行速度,拓宽了电机恒功率速度范围,从而能够更好地发挥电机固有特性。
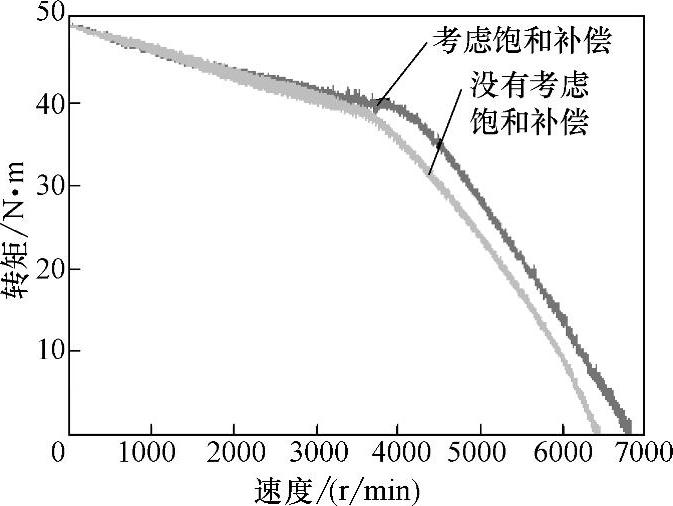
图6-15 转矩—速度输出特性
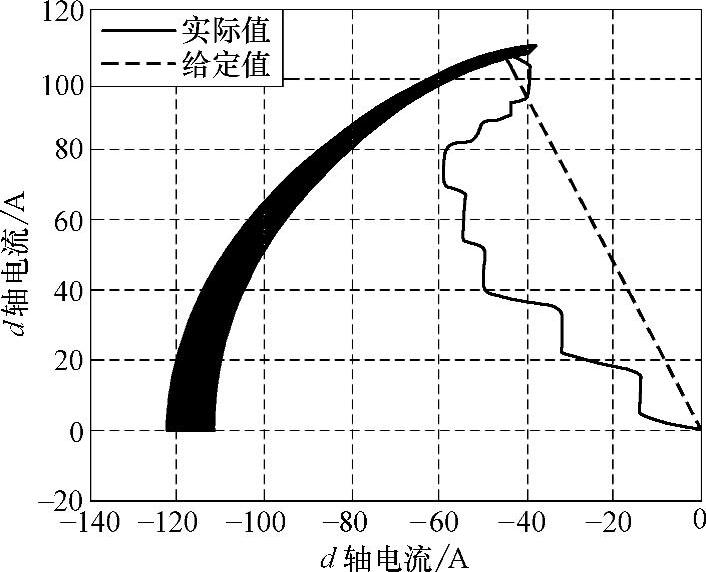
图6-16 定子电流矢量轨迹
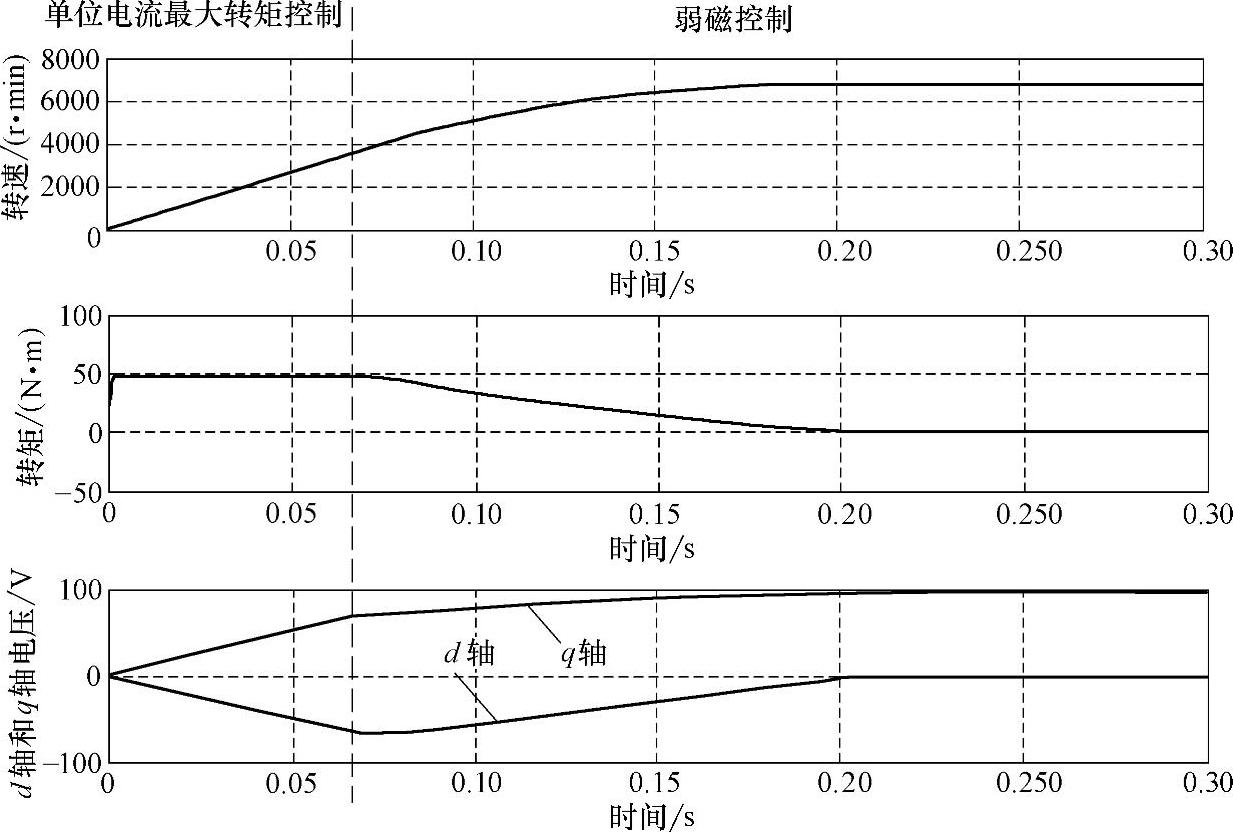
图6-16~图6-19所示为考虑电机磁路饱和的控制方式下,电机从零速到达最大速度的仿真波形。图6-16所示为定子电流矢量轨迹。图6-17所示为d轴电流、q轴电流和相电流给定值与实际值波形。图6-18所示为电机输出转速、转矩与d轴和q轴电压随时间变化波形。图6-19所示为电压矢量α、β分量波形。图6-20所示为稳态下逆变器输出的AB线电压波形。
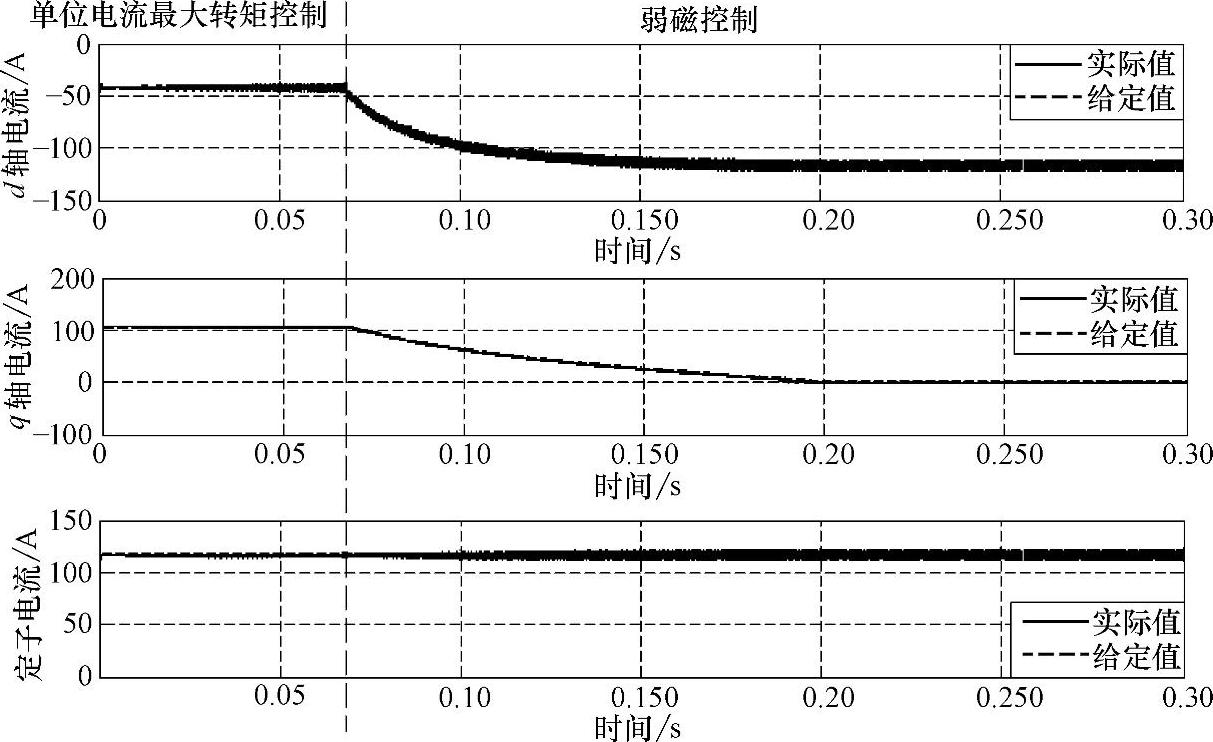
图6-17 d轴电流、q轴电流和相电流给定值和实际值波形
 (https://www.xing528.com)
(https://www.xing528.com)
图6-18 电机输出转速、转矩与d轴和q轴电压随时间变化波形
针对电机动态特性,对电机转速和转矩阶跃特性进行仿真。图6-21所示为电机满载从零速阶跃到额定转速3000r/min,0.2s转矩从满载跌落到半载,0.25s转矩从半载阶跃到满载的转速、dq轴电流、定子电流幅值、dq轴电压以及转矩的仿真输出波形。
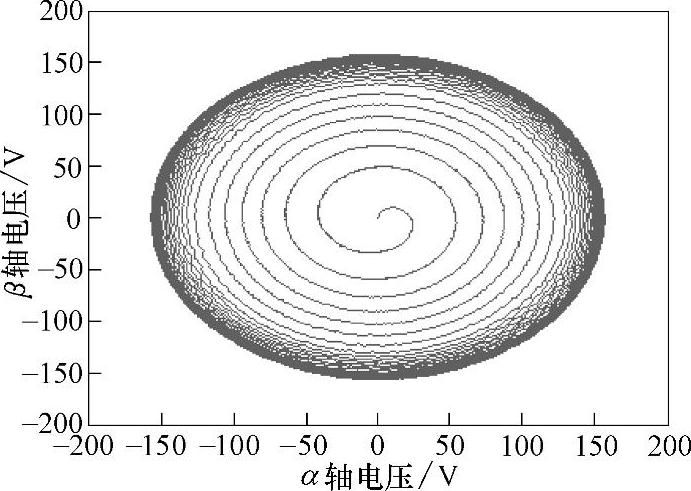
图6-19 电压的α、β轴分量的矢量轨迹
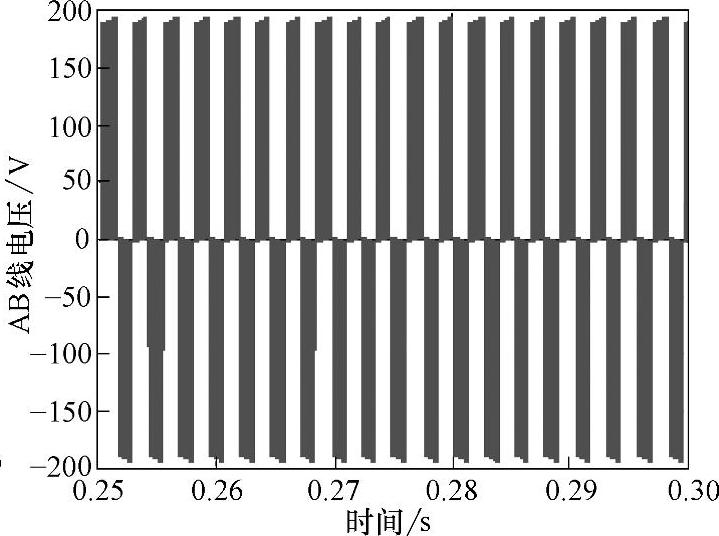
图6-20 AB线电压波形
通过上述仿真结果,可以得出以下结论:
1)控制系统采用SVPWM调制技术,从仿真波形的稳态部分看,稳态波动较小,系统具有较好的系统静态性能。
2)从d轴和q轴的电流电压波形可以看出,系统控制可以平滑进行切换,表明系统具有良好的动态性能。
3)从电流矢量轨迹与电压和转矩的仿真波形可以看出,电机的运行区域只有恒转矩区域和恒功率弱磁运行区域,与有限元分析的结果一致。
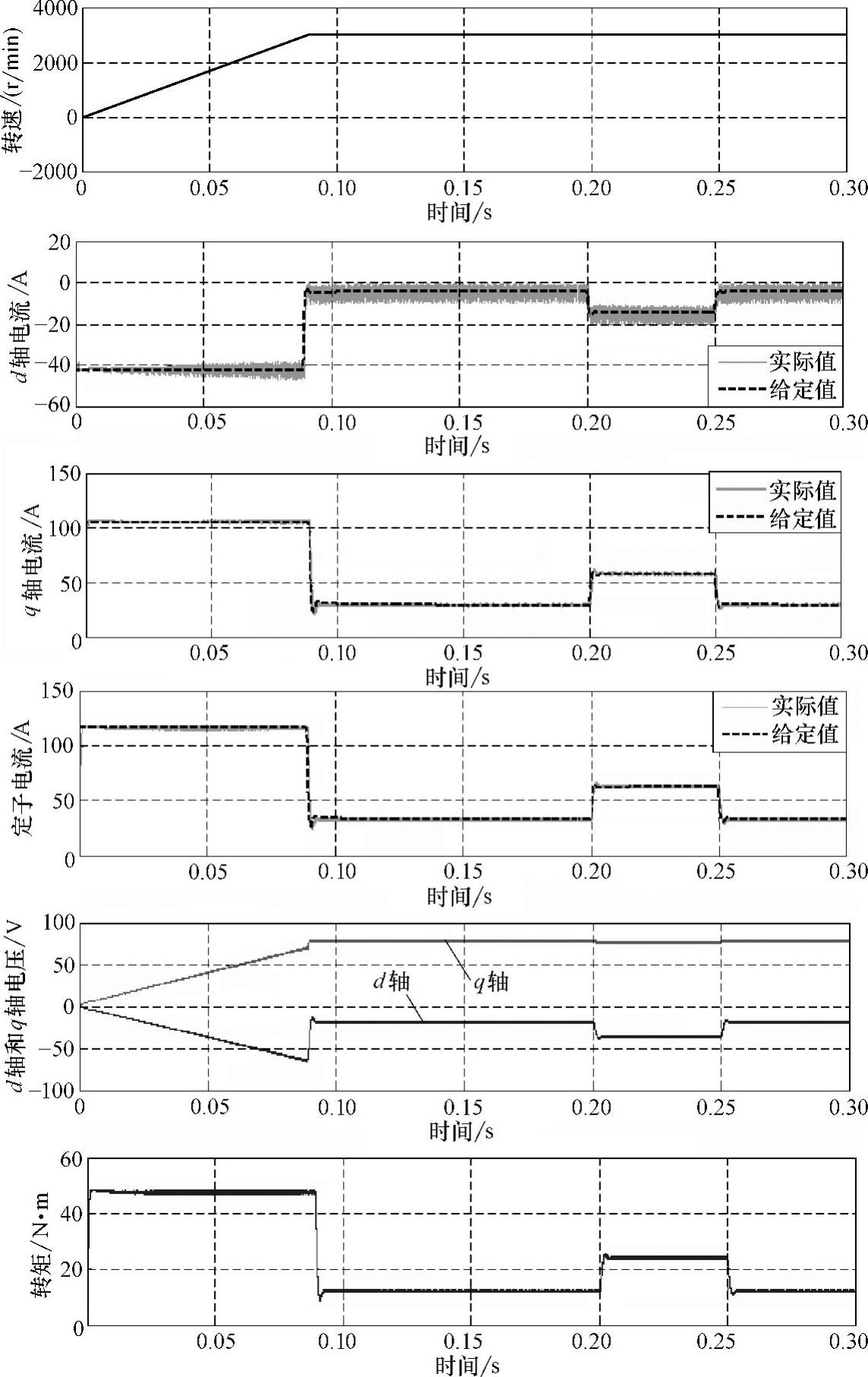
图6-21 控制系统速度—转矩动态特性仿真图
4)由图6-16所示的定子电流矢量轨迹可以看到,定子电流矢量沿着定子电流圆圆周移动,与理论分析完全一致。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。