



永磁电机的速度电流双闭环电流矢量控制系统框图如图6-11所示。
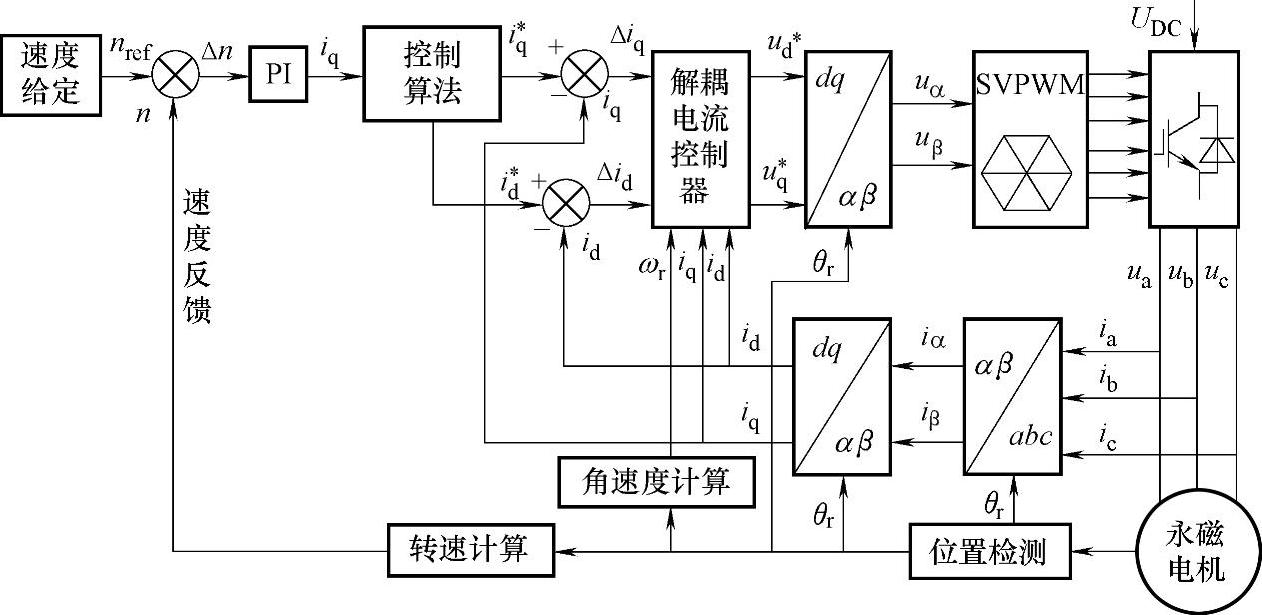
图6-11 基于SVPWM的转速电流双闭环电流矢量控制系统框图
1.控制系统流程
控制系统流程为:给定转速和反馈转速进行比较,通过PI调节器得到q轴电流,然后由控制算法得到d轴和q轴电流的给定值。d、q轴电流给定值分别与各自的反馈值比较,经过解耦电流控制器,得到d、q轴电压分量,进行反Park变化后得到其α、β分量,经SVP-WM调制方式,实现对逆变器控制,从而实现对永磁电机的闭环控制。
图6-11中控制算法的详细框图如图6-12所示。控制方式的选择通过判断端电压值是否达到限幅值作为切换点。当电压值小于或等于限定值时,采用单位电流最大转矩控制,而当电机电压大于限定值时,采用恒功率弱磁控制。
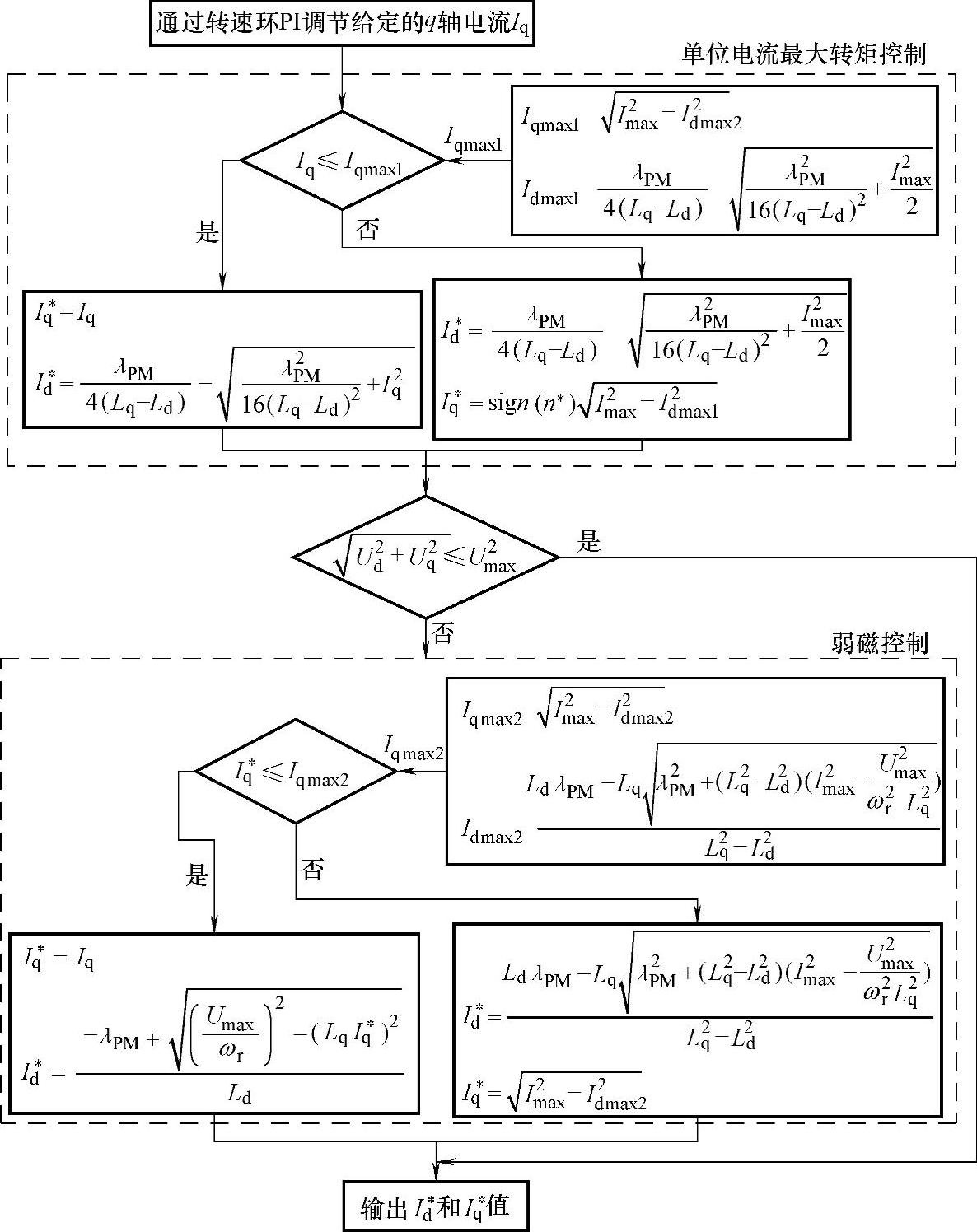
图6-12 电流矢量控制算法框图
2.电流环解耦控制(https://www.xing528.com)
永磁同步电机矢量控制中的d轴和q轴电压一般是分别由d轴和q轴电流经过调节器得到的。从电机的数学模型中可以看到,d轴电压中含有q轴电流分量,而q轴电压中也含有d轴电流分量。因此,采用上述的控制方式,就会造成对d轴分量的调节影响到q轴分量。为了更好地控制电机,引入了电流环解耦控制的思想,使得控制完全解耦,从而提高控制系统性能和控制精度。
由第2章所示的永磁同步电机数学模型的电压方程,我们将d、q轴电压分为两部分,其中由电阻和微分部分产生的电压用PI电流调节器得到,而d轴电压中由q轴电流引起的分量和q轴电压中由d轴电流引起的分量采用前馈补偿的方式进行考虑,从而实现系统完全解耦,其控制算法框图如图6-13所示。
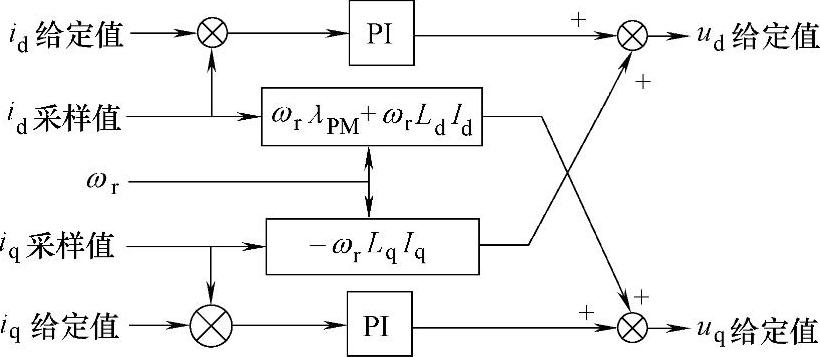
图6-13 电流解耦控制算法框图
为了考虑电机饱和特性对电感参数的影响,同时方便控制上实现,图6-13所示补偿计算式中Ld和Lq采用非线性模型形式的实测结果,根据不同电流值,采用线性插值的方式得到。考虑饱和解耦电流控制器,即图6-11中所示的电流解耦控制器的详细框图如图6-14所示。
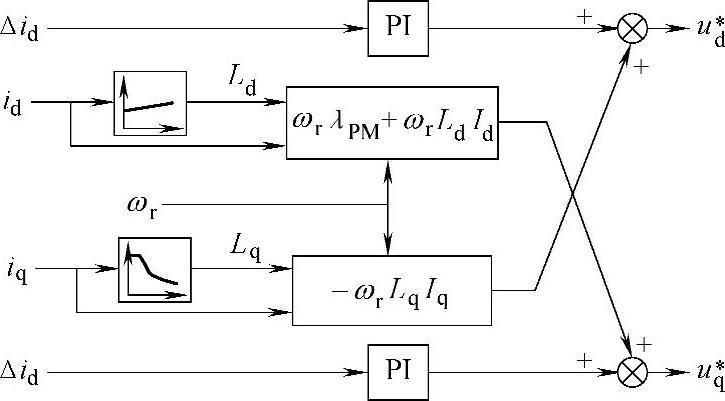
图6-14 考虑饱和的电流解耦控制器框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。