



非线性模型即为式(3-5)所示电感参数计算模型,按电流控制策略(6.2节)分别对定子电流有效值为100A、200A、300A和400A四种情况下不同转速对应的d轴和q轴控制电流进行分析计算,并与有限元分析直接得到的结果进行比较,分别如图3-17a、图3-17b、图3-17c和图3-17d所示。
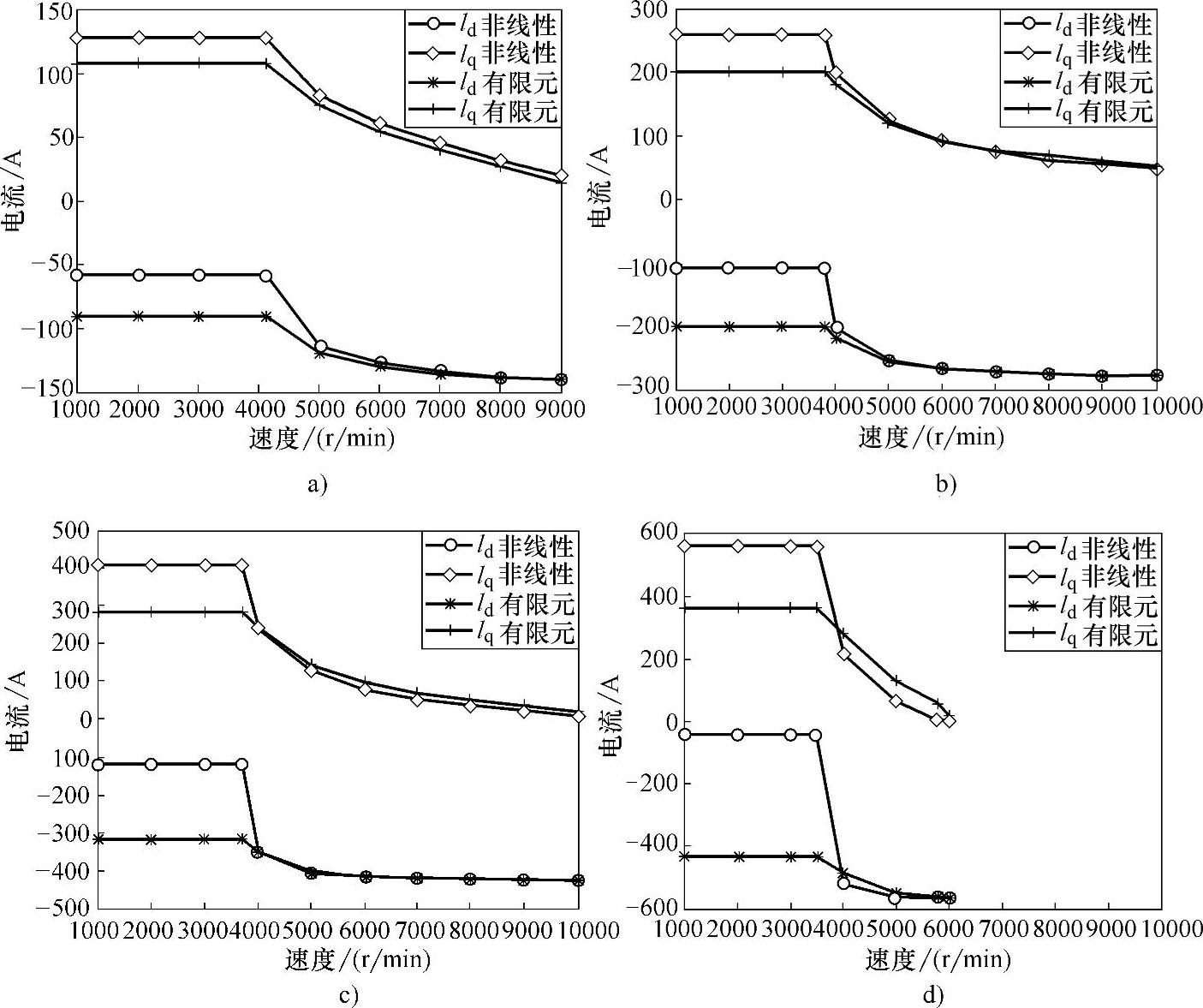
图3-17 非线性电感参数的速度—电流特性曲线
a)100A b)200A c)300A d)400A
从图3-17所示的四种电流情况下的d轴和q轴电流分析结果可以看出,在恒转矩区域,即基速以下的速度运行区间,采用非线性电感参数计算所得d轴和q轴控制电流要远大于有限元直接结果,而且随着电流幅值的增加,两者之间的差异也随之变大。这是由于在恒转矩区域时弱磁电流相对较小,电机磁路的饱和特性偏强,而非线性模型并没有很完全地考虑磁路饱和的影响,且随着电流幅值增大,磁路的饱和特性变得越强,从而造成上述分析结果。由此可知,非线性模型确定的电感参数不能准确反映电机的磁路特性,依其为依据所设计驱动系统性能也必将受到影响。
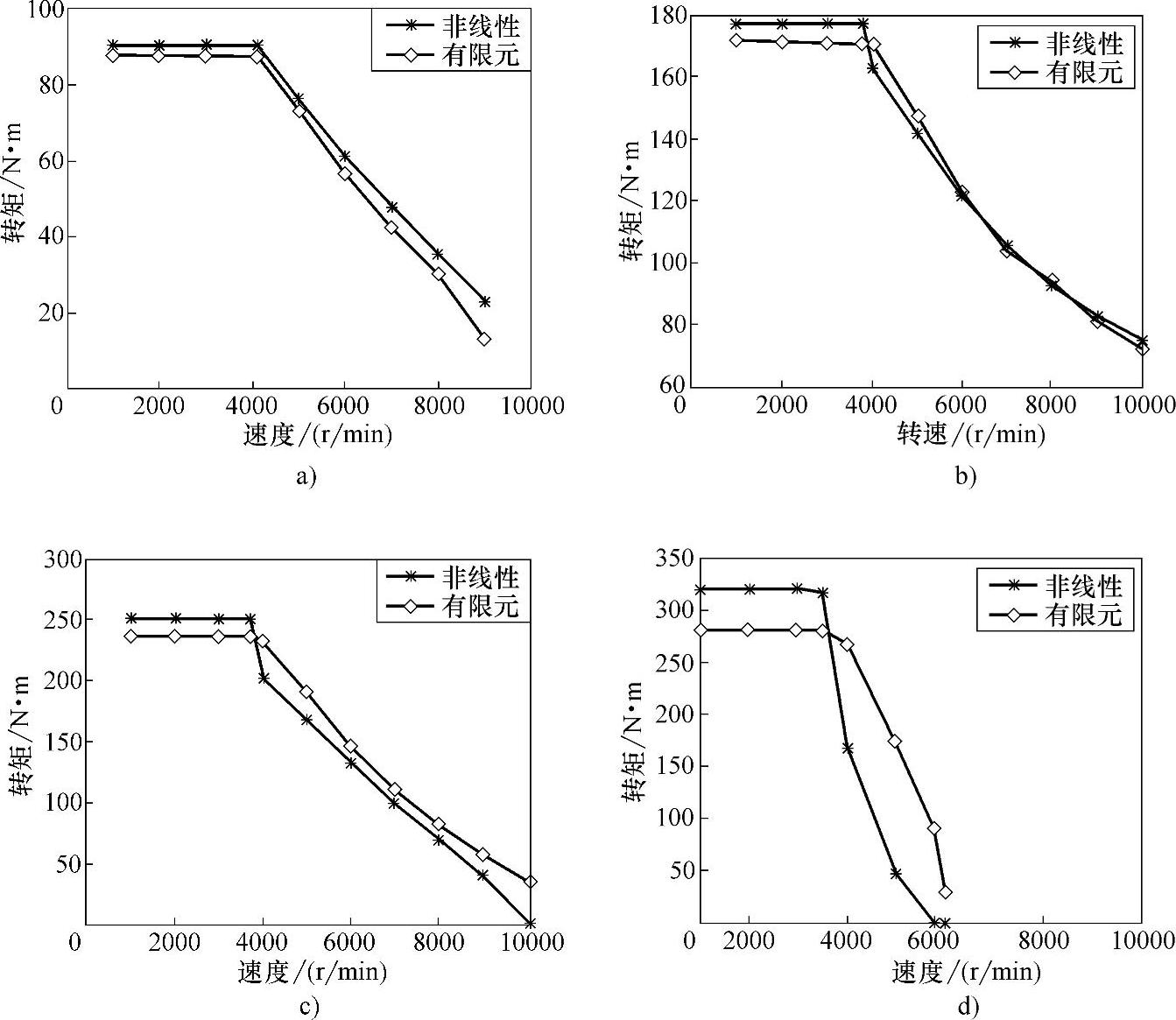
100A、200A、300A和400A四种电流幅值情况下电机的速度—转矩特性与有限元结果对比图分别如图3-18a、图3-18b、图3-18c和图3-18d所示。
从图3-18所示的分析结果同样可以看到,在恒转矩运行区域基于非线性模型计算得到的电感参数进行计算的结果要高于有限元,且随着定子电流幅值的增大两者间的差异也随之增大。而在弱磁运行区域,两者差异相对变小,电流在100A时非线性模型得到的结果高于有限元分析结果,200A时相差不多,300A和400A时非线性模型结果要小于有限元分析结果。这是由于在电流幅值偏小时,弱磁运行区域的弱磁电流最大值也偏小,不足以使得电机磁路退出饱和,电机最大转速实际提不到非线性模型预测的那么高,而随着电流幅值增大,电机磁路在弱磁运行区域饱和度大大降低,因此电机实际能够到达的最大转速便会大于没有很好考虑电机磁路特性的非线性模型得到的结果。
同理,根据最优电流控制角方程和上述转矩分析结果,得到不同电流幅值情况下,电机电磁转矩随最优电流控制角变化曲线与有限元分析结果的比较图分别如图3-19a、图3-19b、图3-19c和图3-19d所示。
为了对比和分析方便,将图3-18所示的四个图和图3-19所示的四个图的曲线分别绘制到同一坐标系下,得到如图3-20和图3-21所示的速度—转矩特性曲线和角度—转矩特性曲线。
从图3-20中可以看到,最佳弱磁性能是在电流有效值介于200A到300A的范围内时,这是因为此电机的特性电流(=λm/Ld)大约为270A,而电机定子电流幅值等于此值时,电机将具有最优的弱磁运行特性。
从图3-21中可以看到,随着电流幅值的增大,有限元分析得到的电流控制角超过非线性模型分析结果越大,这说明随着电流幅值的增加,电机的磁路饱和特性也随之增大,从而造成了图3-17所示的在基速以下两者电流的差异。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-18 不同电流幅值下非线性和有限元速度—转矩特性曲线比较
a)100A b)200A c)300A d)400A
从上述四种电流情况下分析结果可以看出,非线性模型所得的电感参数的不准确对电机性能预测造成的重大影响。由此也说明了对电感计算模型进行修正的必要性。下面将就其他几种计算模型分析结果进行比较。
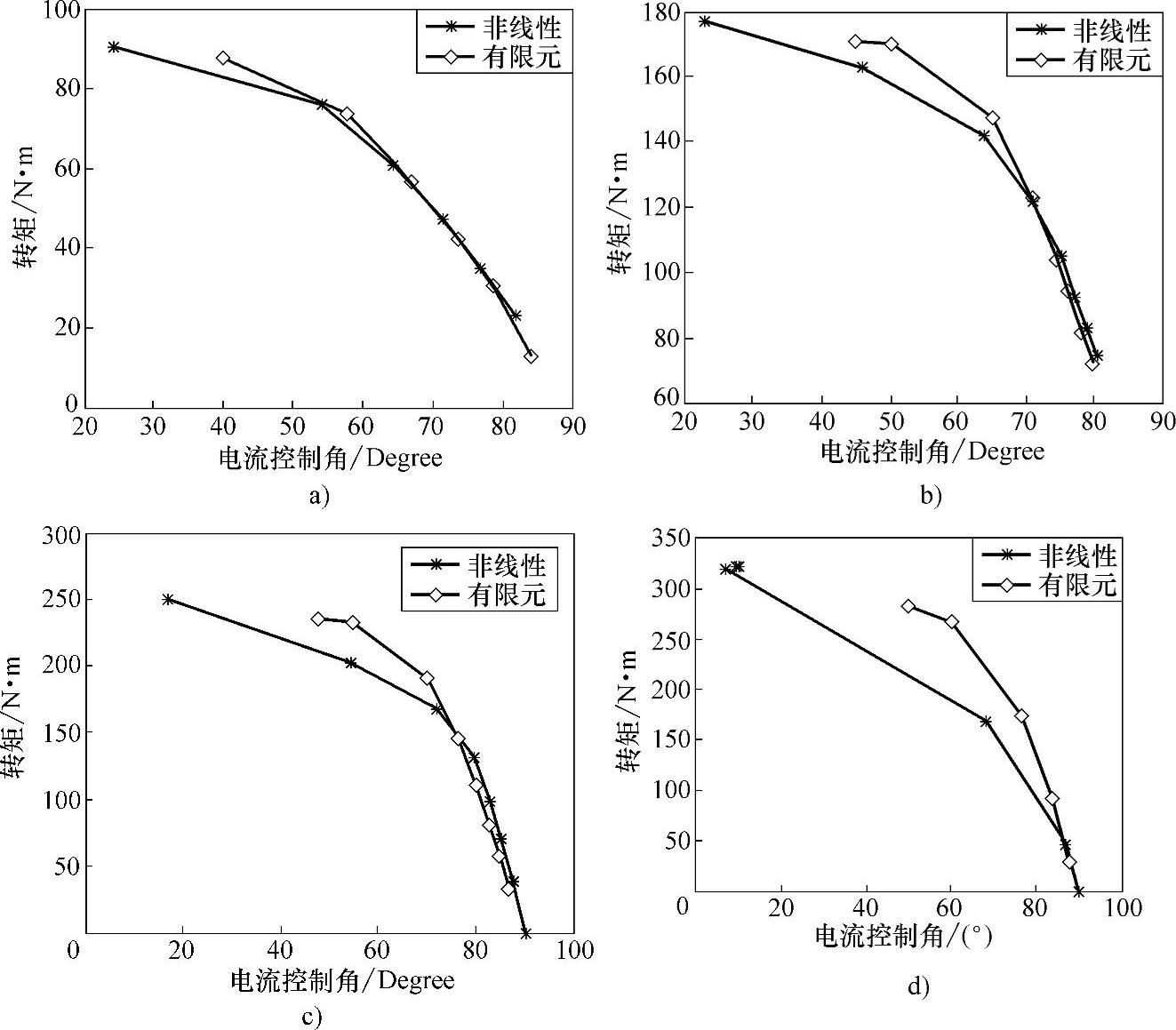
图3-19 不同电流幅值下非线性和有限元角度—转矩特性曲线比较
a)100A b)200A c)300A d)400A
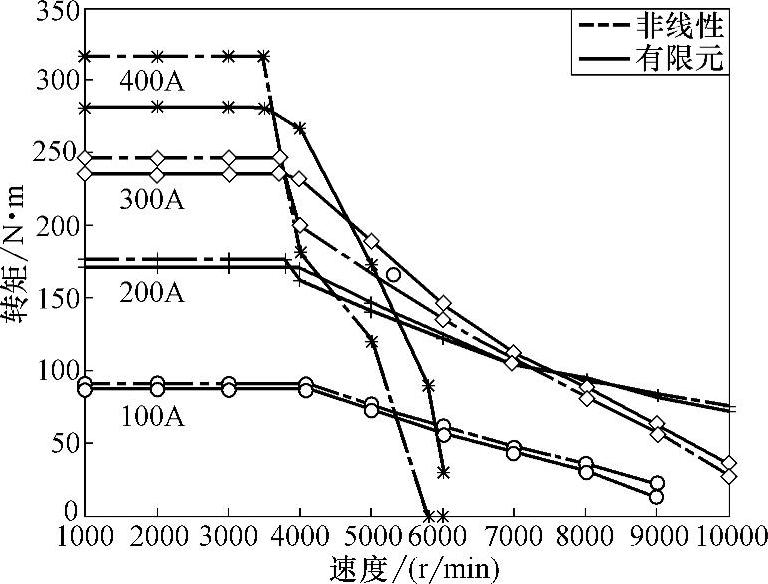
图3-20 速度—转矩特性曲线
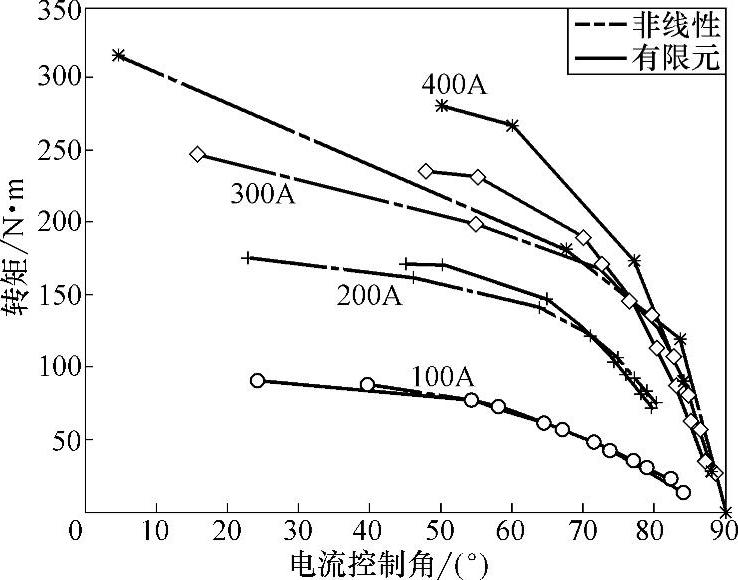
图3-21 电流控制角—转矩特性曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。