



1971年,德国学者Blaschke提出了对交流电机进行矢量控制的思想,它的出现对交流电机控制技术的研究具有划时代的意义,使得交流电机的控制与直流电机一样简单。矢量控制的基本思想是在磁场定向坐标下,将电流矢量分解为产生磁通的励磁电流分量id和产生转矩的转矩电流分量iq,它们相互垂直,彼此独立,对id和iq的控制,就是对定子电流空间矢量和相位的控制[5,6]。
由式(2-7)dq坐标系下电压方程,可建立内置式永磁同步电机有限元模型,其电流矢量控制向量图如图3-1所示。
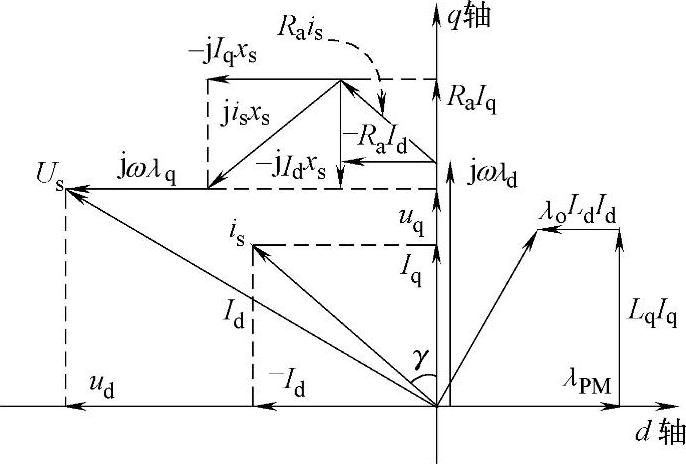
图3-1 内置式永磁同步电机的电流矢量控制向量图
图3-1中,γ是电流控制角,is是三相合成电流。由图3-1可得到电机矢量控制的d轴和q轴电流与定子电流矢量关系为

式中 id,iq——d轴和q轴控制电流;
γ——电流控制角。
在有限元分析中,激励源为三相定子电流,因此要将在dq坐标系下的id和iq变换到三相静止坐标系下的ABC三相电流iA、iB和iC、其表达式为

式中 θ——转子位置角;
Is——电流有效值。
建立内置式永磁同步电机二维瞬态场有限元模型的步骤如下:
1)结合AutoCAD在Maxwell 2D设计界面中,绘制二维电机模型,然后对模型进行分组和重命名,如将定子绕组分别划分为A相、B相和C相绕组这三组,这样便于后面的材料和激励源设置,提高工作效率。
2)选择求解器类型,根据需要选择瞬态求解器。(https://www.xing528.com)
3)对几何模型的各部分进行材料设置,特别是对每个永磁体还要建立各自的面坐标系,该坐标系为永磁体磁化方向的基准方向。
4)对绘制好的几何模型进行边界条件和激励源的设定,其中定义绕组激励源时采用的是电流源激励。
5)设定边界条件(band)、转子的速度和初始位置角θ0,如图3-2所示。
6)对几何模型进行自适应网格剖分,设置好求解时间和步长,进行有限元计算。
7)计算完成后,进行后处理,得到需要的仿真结果。
8)要求电机初始角要为零度,即零时刻d轴和A相轴线重合,因此要对转子的初始位置进行确定,即设定初始位置角θ0。

图3-2 初始位置角设定示意图
在有限元分析软件中,转子位置角θ计算式为
θ=6pnt-(90°-δ) (3-3)
式中 δ——电流控制角;
p——电机的极对数;
n——转速;
t——时间。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。