



1990年日本学者S.Morimoto对永磁电机运行区域进行了分析总结,首次提出弱磁运行的三个运行区域(模式Ⅰ、模式Ⅱ和模式Ⅲ)[18]。由于设计的不同,对于特定的永磁电机系统,三个运行区域并不一定都存在。如图1-20a和图1-20b所示两种情况的电机只存在两个运行区域,而图1-20c所示的三个运行区域不存在。
学者S.Morimoto所给出的三个运行区域划分具体如下。
1.模式Ⅰ:恒转矩运行区
在该运行区域,随着转速升高,电机输出转矩可维持额定输出转矩不变。从零速到基速,控制电流在最佳电流角γ获得最大输出转矩,即单位电流输出最大转矩控制(MTPA)。电流矢量的计算方程由6.2节电流控制策略中给出的式(6-4)、式(6-5)和式(6-7)计算确定。计算方程中,定子电流矢量幅值is等于最大限制电流幅值,输出电压Uo小于或等于电压限制幅值,且随着转速的升高而增大,当电机转速达到基速时,输出电压幅值等于电压限制幅值。在模式I下电机定子电流矢量工作点轨迹为转矩曲线和电流限制圆切点轨迹,如图1-20中所示A点。
2.模式Ⅱ:恒功率弱磁运行区
在该运行区域,随着转速升高,电机输出功率恒定不变。在电机基速以上,由于电压限制,需利用去磁的d轴电枢反应使电压满足最大限制的要求。在某一特定速度ω时,优化电流矢量产生最大输出转矩的给定值,可按6.2节电流控制策略中给出的式(6-11)、式(6-12)和式(6-13)计算。模式Ⅱ情况时电机定子电流矢量工作点轨迹为电压限制圆和电流限制圆的交点,沿着定子电流限制圆的圆周移动,其幅值保持最大电流限制不变,电流控制角γ随着速度的增加而增加,如图1-21、图1-22和图1-23中的电流控制角曲线。
对应M点在电流电压轨迹圆的位置不同,其分析如下:
1)当电压限制圆中心点M位于电流圆外时,即图1-20a所示情况,电流矢量轨迹沿A→B→C,在C点,即iq=0,id=-Imax,γ=90°,电机输出功率达到零,电机运行速度达到最大值。
2)当M位于电流圆上时,即图1-20b所示情况,则随着速度的增大,电流矢量轨迹沿A→B→M,在M点电机,即iq=0,id=-Imax,γ=90°,电机输出功率为零,电机运行速度达到无限大。(https://www.xing528.com)
3)当M位于电流圆内时,即图1-20c所示情况,则随着速度的增大,电流矢量轨迹沿A→B→D,在D点电机,即iq=0,id=-Imax,γ=θx,电机输出功率为零,电机运行速度达到模式Ⅱ和模式Ⅲ的切换点。
3.模式Ⅲ:弱磁运行的高速运行区
在该运行区域,随着转速升高,电机输出功率逐渐减少。此运行区并非所有的永磁电机都存在,只有当电压限制圆圆心M位于电流限制圆内时,即λPM/Ld<Imax,才存在。优化电流矢量产生最大输出转矩的给定值,可由6.2节中给出的式(6-16)、式(6-17)和式(6-18)计算得到。模式Ⅲ下电机定子电流矢量工作点轨迹为恒转矩曲线和电压限制圆的切点轨迹,沿着位于定子电流限制圆内的一条曲线移动,如图1-20c中所示的D→M段曲线,因此在此运行区,电机的运行只需考虑电压约束条件即可。
三种运行模式下,电机转矩、功率、电压、电流和输入功率因数对应关系如图1-24所示。
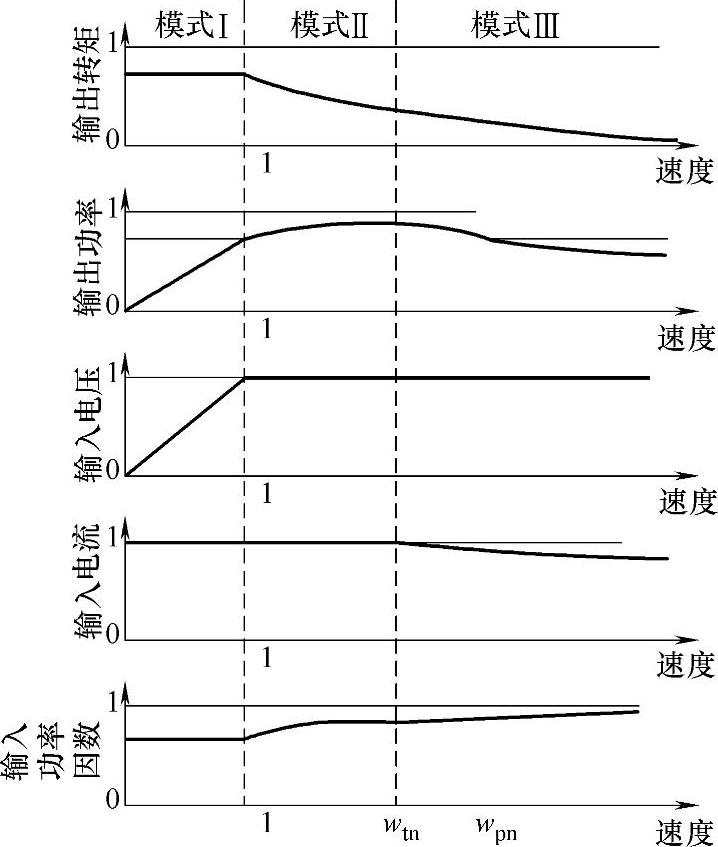
图1-24 弱磁控制的三个区转矩、功率、电压、电流和功率因数对应关系
图1-24中转矩、功率、电压和电流均采用其额定值进行标幺化的形式表示。从图中可以看出,在模式Ⅱ中,由于电机损耗等影响,电机的输出功率并不能维持平直的直线;而电机的输入功率按模式Ⅰ、模式Ⅱ和模式Ⅲ的次序逐渐增加,逼进于1。
由于一般情况下永磁体作用在d轴上,所以一般d轴电感较小,对于大多数永磁电机一般不能满足Ld>λPM/Imax,即λPM/Ld<Imax,所以模式Ⅲ的运行方式一般不存在,即使电机满足了Ld>λPM/Imax,即存在模式Ⅲ运行区,实际控制也很难做到无限速度运行。因此永磁电机的运行区域主要为模式Ⅰ和模式Ⅱ的控制模式,本书也将重点讨论这两种模式下电机的控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。