



开关周期为T、占空比为d的降压变换器,如图12-11所示,需要恒电压来驱动几种不同负载。这些负载中,例如严格调制的电力电子变换器,具有恒功率性质。图12-23等效电路中,P和R分别表示恒功率和恒电压(见图12-23),其上下限为:

为满足稳定条件,取Pmin.和Rmax.分别为零和无穷大。另外设Pmax.=PCPL,max.=PCVL,max.Pmax.对应于所有负载都工作并且都是恒功率性质或者是所有负载都工作并且都是恒电压性质。Pmin.和Rmax.分别发生在没有恒功率负载工作和没有恒电压负载工作情况下,或者系统完全空载。
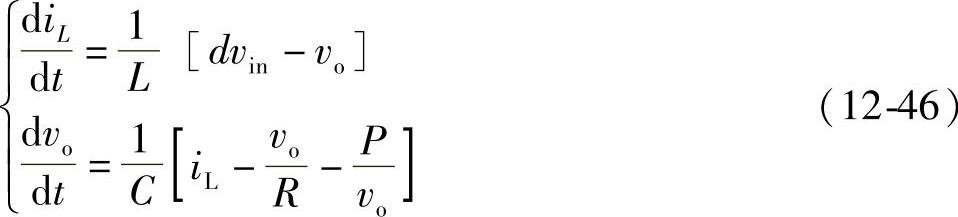
在连续导通模式下,利用状态空间平均法,可将DC/DC变换器的状态方程写为:
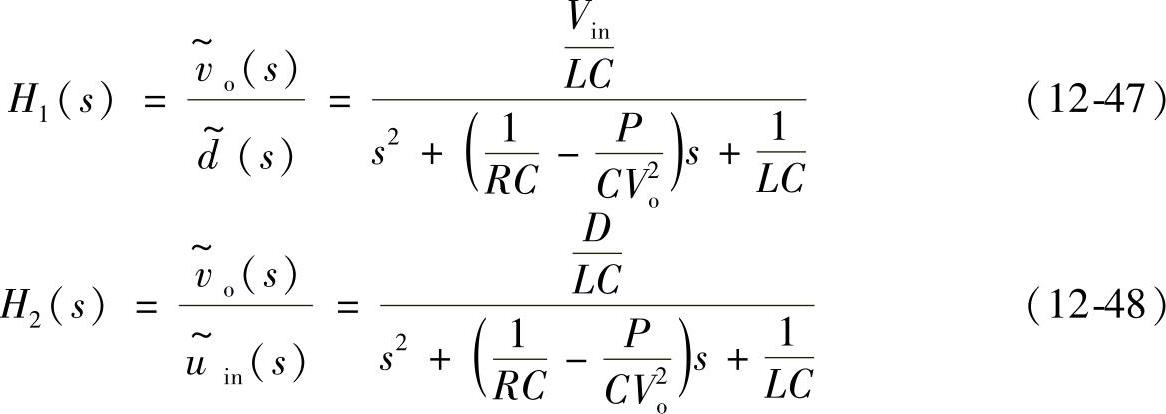
假设电压和占空比分别受到微小扰动,式(12-46)所示系统的小信号传递函数分别为:
系统稳定的充分和必要条件由下式确定,即传递函数的极点实部为负数:

式(12-49)和式(12-33)的稳定条件完全相同。这说明如果恒功率负载的总功率小于恒电压负载的总功率,我们就可以采用诸如PI控制器等来控制DC/DC变换器,而不会引起不稳定。下一节我们将采用反馈线性化技术设计图12-11中带不同负载DC/DC变换器的负阻抗稳定控制器。
反馈线性化技术
这一节,我们用反馈线性化技术来控制变化器[18,19]。我们寻找一种非线性反馈,以抵消式(12-46)中的非线性项。由微分方程式(12-46)可以看出,输入项(dvin)和非线性项(P/vo)之间没有直接联系,鉴于此,引入以下变化

式中 VORef.——减压变换器的输出参考电压。
由式(12-50),状态方程式(12-46)可写为:

为消除式(12-51)中的非线性项,采用如下非线性反馈,即
式中 k1、k2和 ——待设计控制器的参数。
——待设计控制器的参数。
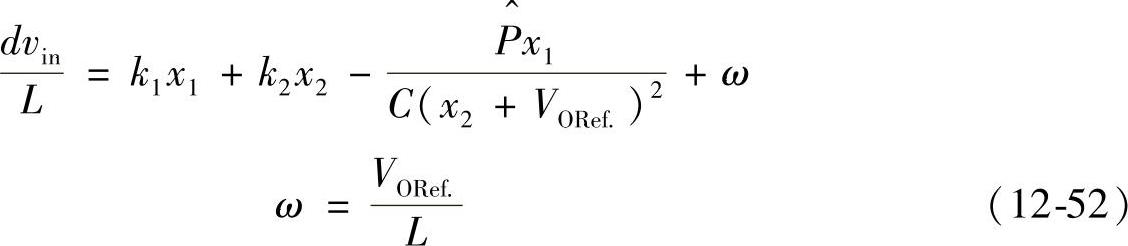
基于以上非线性反馈,式(12-51)重写为

如果 ,系统就是线性的。由此可调节控制器的其他参数(例如k1、k2),使系统极点发生在合理的位置。但是并不是说负载可以任意控制,因为它们是变化的。下一节我们讨论变化负载的系统稳定问题。
,系统就是线性的。由此可调节控制器的其他参数(例如k1、k2),使系统极点发生在合理的位置。但是并不是说负载可以任意控制,因为它们是变化的。下一节我们讨论变化负载的系统稳定问题。
12.7.1.1 稳定性分析
为了评估变换器的稳定性,定义连续可微正定函数V(x):

式中K>0、k2<1/L;因此,V(x)为正定函数,其导数为:
 (https://www.xing528.com)
(https://www.xing528.com)
为保证变换器稳定,V(x)的导数应为负定,因此控制器的参数应满足:

结合式(12-45)给出的P和R的上下限及逆变器电感和电容的数值变化,稳定的控制参数如下:

其中,Lmax.和Cmax.为L和C的最大值。 为负定函数,相应地,V(x)为李亚普诺夫函数。因此,闭环系统为渐进稳定,工作点为稳定平衡点。
为负定函数,相应地,V(x)为李亚普诺夫函数。因此,闭环系统为渐进稳定,工作点为稳定平衡点。
12.7.1.2 仿真结果
我们设计了基于反馈线性技术的负阻抗控制器和PI控制器,参数见表12-5,对其特性进行了仿真。为研究变换器的动态特性,令恒功率和电阻负载发生变化。仿真结果如图12-29~图12-31所示。
表12-5 降压变换器和稳定控制器参数
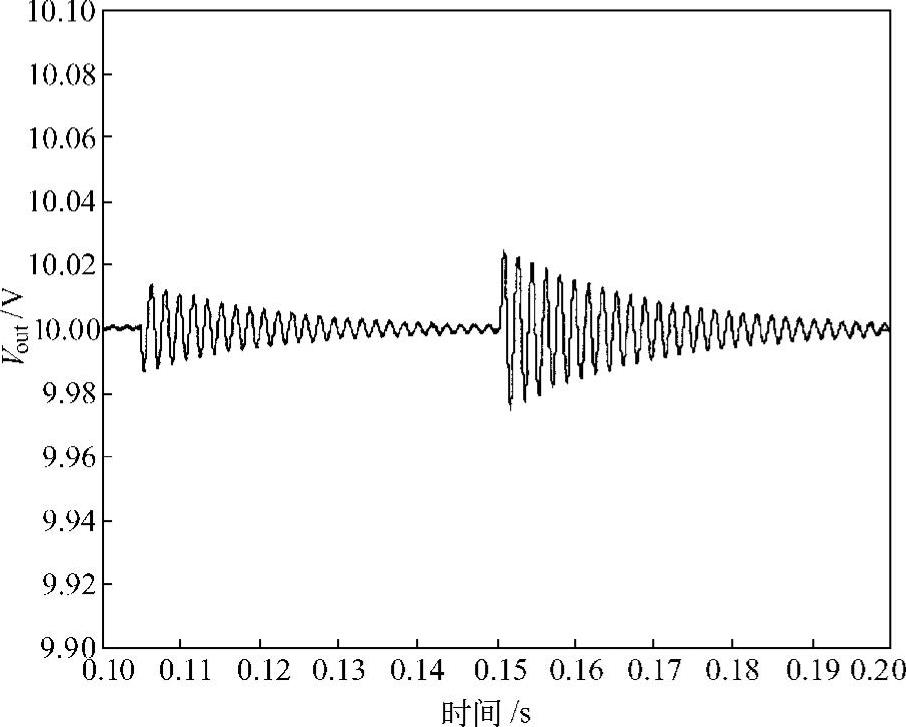
图12-29 降压变换器控制器的动态响应,负载由P=10W,R=20Ω变为P=10W,R=10Ω和P=10W,R=100Ω
需要指出的是,很多恒功率负载在启动时阻抗增量为正值。因此,功率持续增加直到达到标称功率。此后,功率将保持恒定,阻抗增量变成负值。在图12-32的仿真结果中,在恒功率负载的启动阶段,我们假设v-i特性曲线为直线。
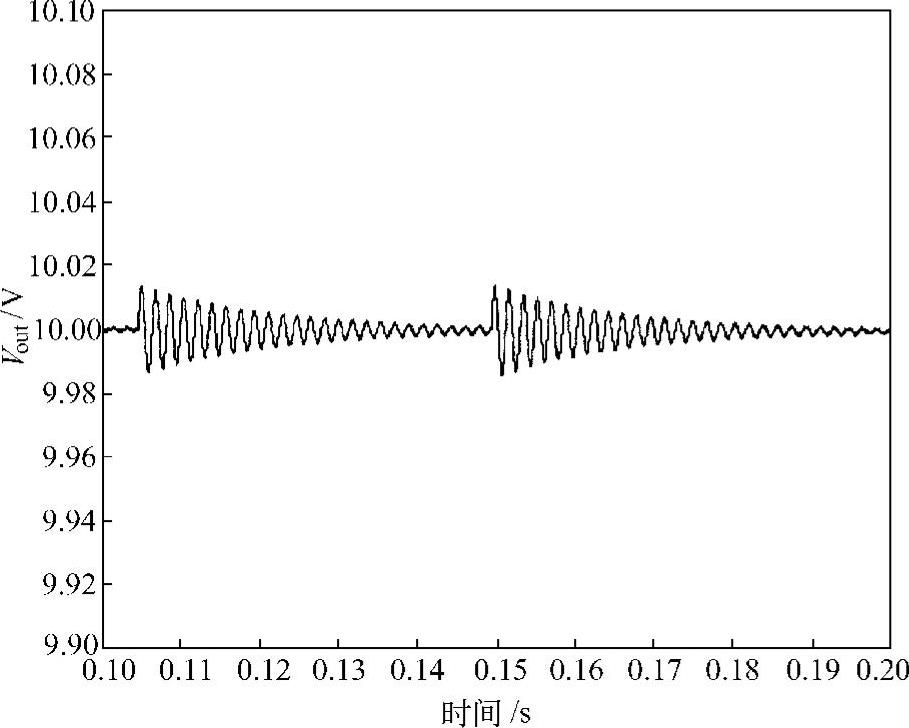
图12-30 降压变换器控制器的动态响应,负载由P=0W变为P=5W和P=10W(R=20Ω,即P恒电压负载=5W)
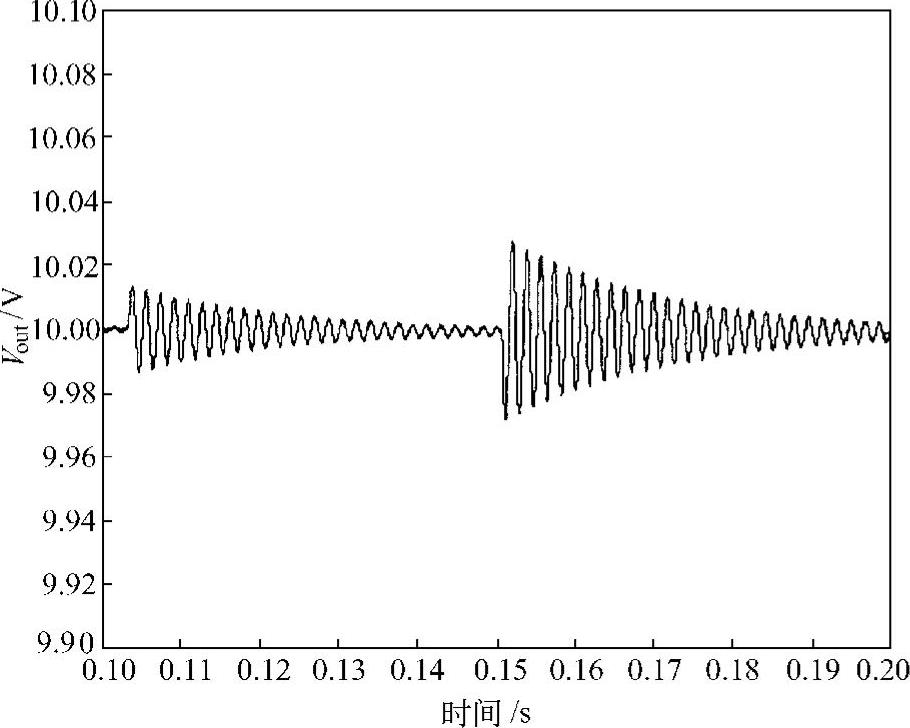
图12-31 降压变换器控制器的动态响应,负载由P=10W,R=20Ω变为P=10W,R=1000Ω和P=20W,R=1000Ω
可以看出,这一节讨论的控制器具有大信号能力。如果DC/DC变换器负载变化不大,我们可以选用基于线性状态变量反馈方法的简单控制器[19],其框图如图12-25所示。采用线性状态变量反馈方法,我们分别设计了带恒功率负载的降压变换器控制器以及同时带恒功率负载和恒电压负载的降压变换器控制器。图12-33和图12-34为其仿真结果。可以看到,控制器在微小扰动时仍可正常工作。因此,当变换器在标称电压下运行且负载变化不大时,可选用简单控制器。
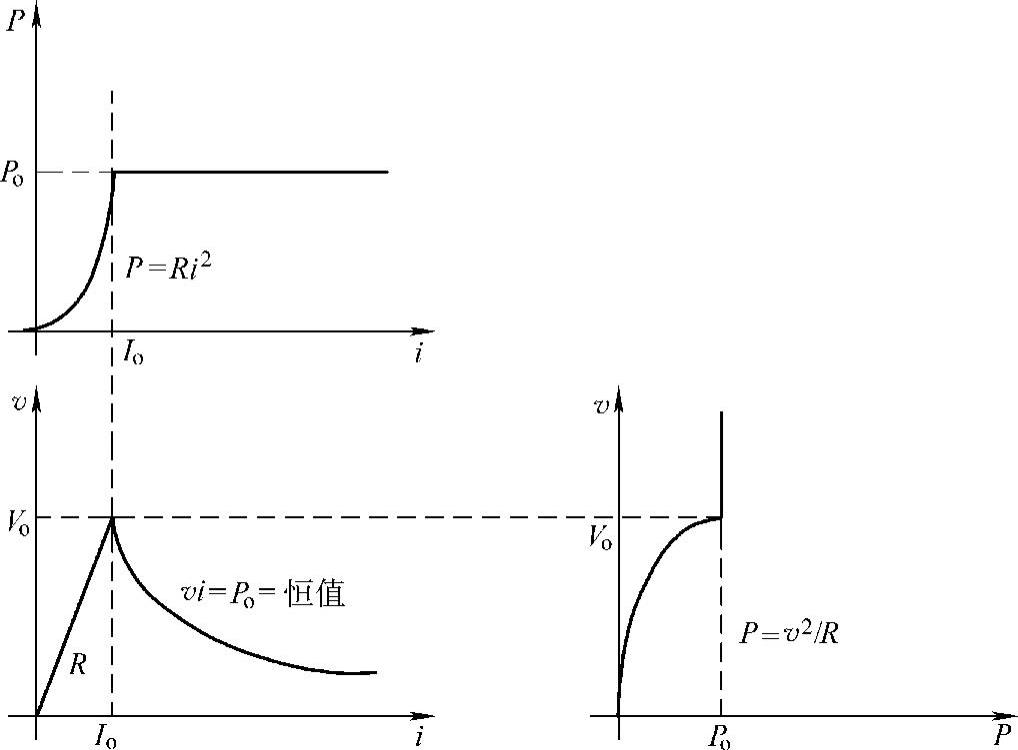
图12-32 实用恒功率负载的v-i特性
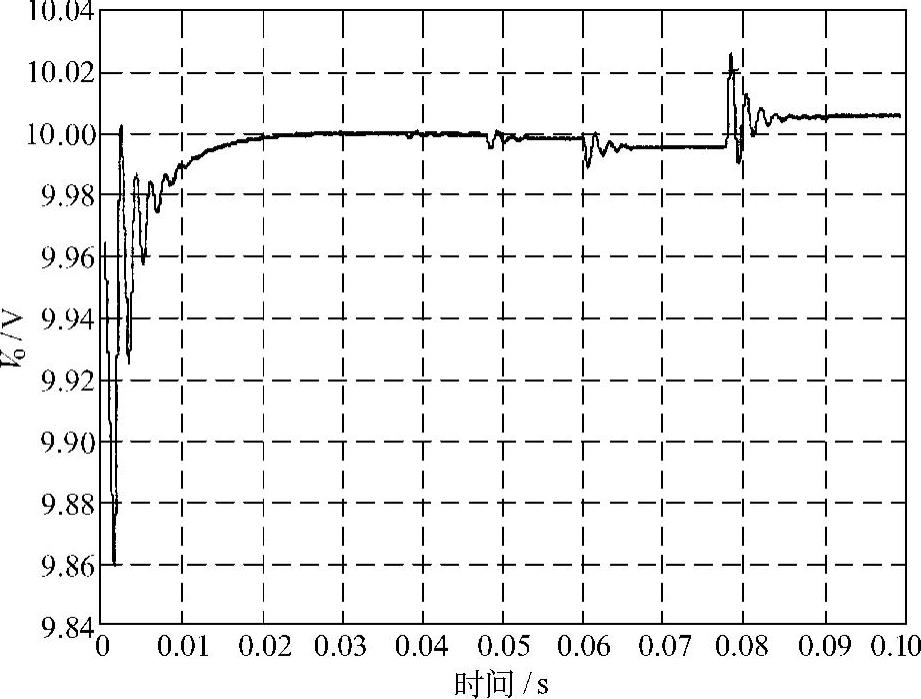
图12-33 线性状态变量反馈控制器动态响应,降压变换器只带恒功率负载
(Vin=20V,L=1mH,C=10mF,P=10W,f=10kHz,Vo,ref.=10V,KI=200,KP=1,K1=0.01,K2=1),功率由P=10W依次变为P=10.5W,P=12W,P=15W,P=5W。
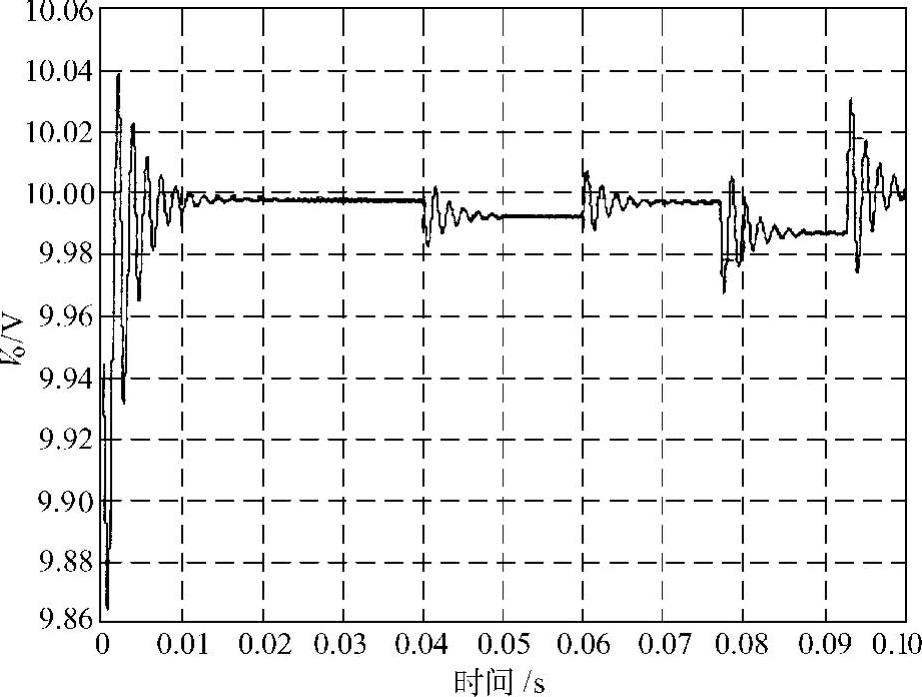
图12-34 线性状态变量反馈控制器动态响应,降压变换器同时带恒功率负载和恒电压负载
(Vin=20V,L=1mH,C=10mF,P=10W,R=20Ω,f=10kHz,Vo,ref.=10V,KI=500,K1=0.01,K2=1),功率由P=10W,R=20Ω依次变为P=10W,R=10Ω,P=5W,R=10Ω,P=15W,R=10Ω,P=0W,R=10Ω。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。