



【摘要】:图11-12给出了转矩—转速特性曲线。可将转矩—转速平面分为5个区域。图11-12 SRM的转速—转矩特性图11-13 SRM的磁滞电流控制如果转速继续增加,运动反电势大于母线电压,电机运行于单脉冲模式下。因此电流控制是不可能的,只有通过调节θon和θoff才能获得最优转矩。在这个区域,转矩与转速成反比,所以,这个区域亦称为“恒功率区”。在恒功率区进一步增加转速,在线计算转子位置的时间将受到限制。
图11-12给出了转矩—转速特性曲线。可将转矩—转速平面分为5个区域。在基速以下,转矩恒定;基速(ωb)是获得最大功率的最小转速。在这个区域内,可灵活进行电流控制或者磁滞控制,以获得理想的电机性能。控制参数有Imax、θon和θoff。采用磁滞控制时,我们定义Imax和Imin或者ΔI。ΔI减小,开关频率增加。需要注意的是极低转速(区域1和2)时,运动反电势远小于母线电压以至于可以忽略。随着转速增加,运动反电势迅速增大,必须增加电流的关断角获得最大平均转矩。磁滞电流控制比较简单,开关频率可变。剩余电流纹波如图11-13所示。
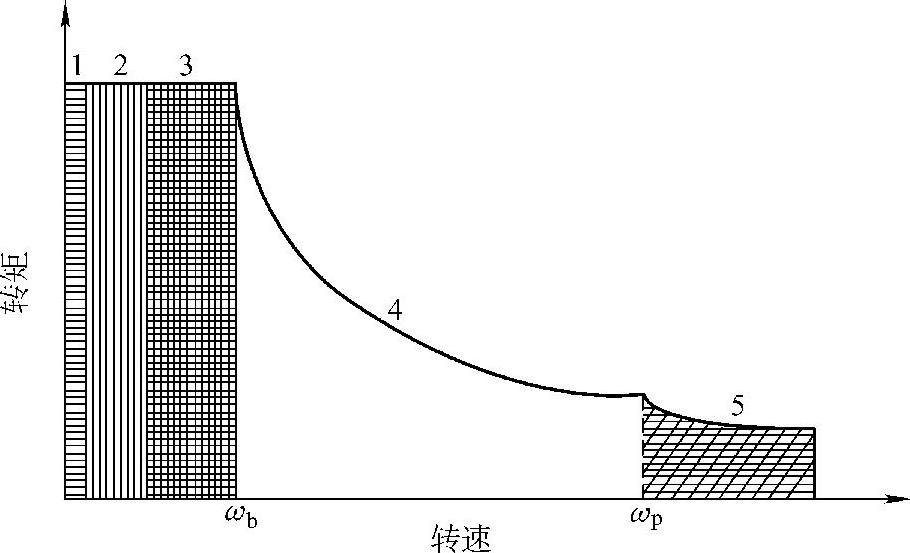
图11-12 SRM的转速—转矩特性
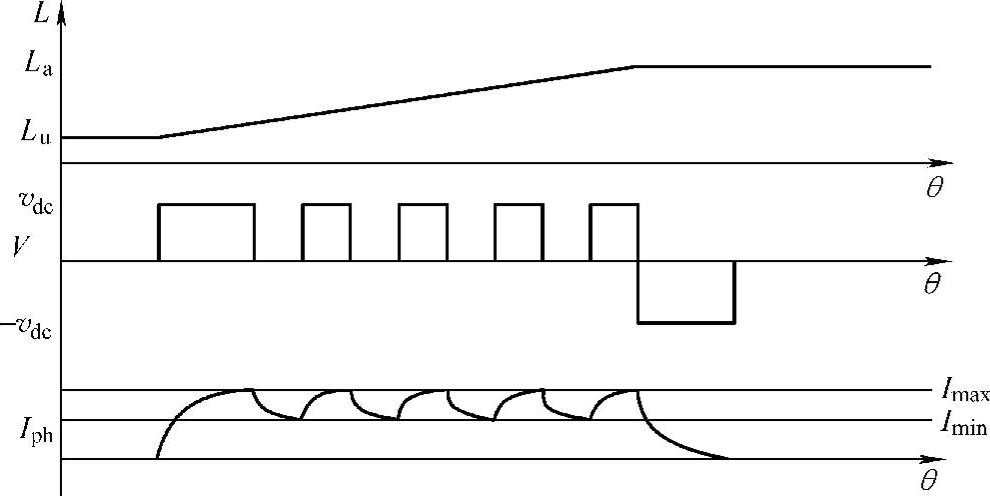
图11-13 SRM的磁滞电流控制(https://www.xing528.com)
如果转速继续增加,运动反电势大于母线电压,电机运行于单脉冲模式下。此时,受反电势的限制,电流永远不会达到额定值。因此电流控制是不可能的,只有通过调节θon和θoff才能获得最优转矩。通常,高速运行需要在定转子磁极完全错开前增加开通角(见图11-14)。在这个区域,转矩与转速成反比,所以,这个区域亦称为“恒功率区”。在恒功率区进一步增加转速,在线计算转子位置的时间将受到限制。定子相的同步导通将导致定子磁轭非正常的磁场分布。这种运行模式成为“超高速运行”(区域5)。需要注意的是,这种运行模式可终止所有定子相电流的连续导通。
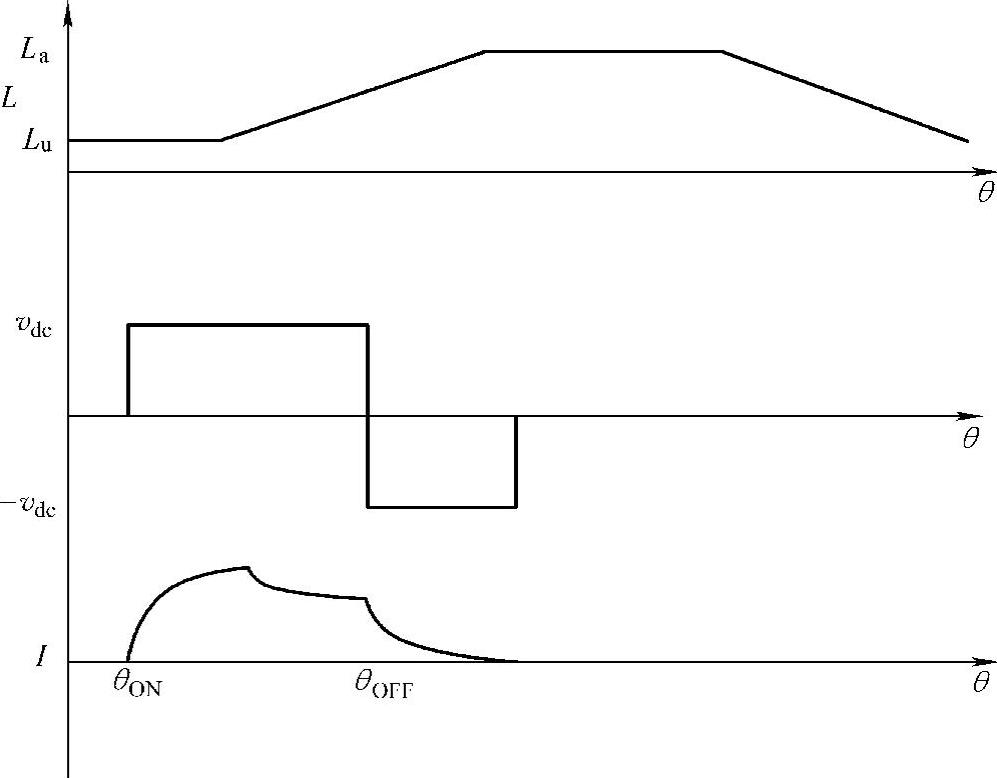
图11-14 SRM的单脉冲运行
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。