



11.1.2.1 无刷直流电机驱动分析
无刷直流电机驱动分析基于如下假设和简化条件:
1)电机不饱和;
2)定子三相绕组电阻相等,自感互感为常数;
3)逆变器中的功率开关器件为理想状态;
4)忽略定子铁耗。
基于上述假设,无刷直流电机可以表示为:

式中 ea、eb和ec——反电势;
L——定子每相自感,L-M=Ls。
电磁转矩为

Te和负载转矩的相互作用决定了电机转速:

式中 TL——负载转矩;
J——总的转动惯量;
B——摩擦系数。(https://www.xing528.com)
参照图11-6的等效电路用拉普拉斯变化表达的系统方程可写为:
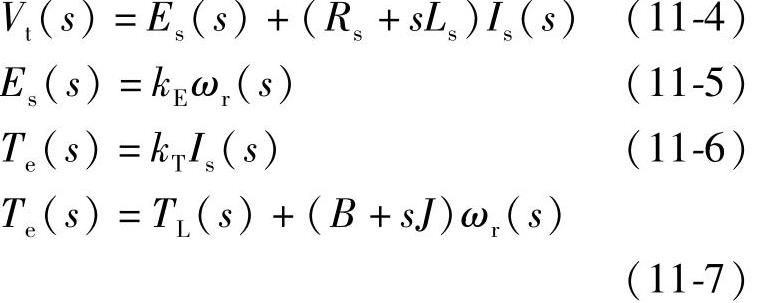
由上述公式可得驱动系统的传递函数:
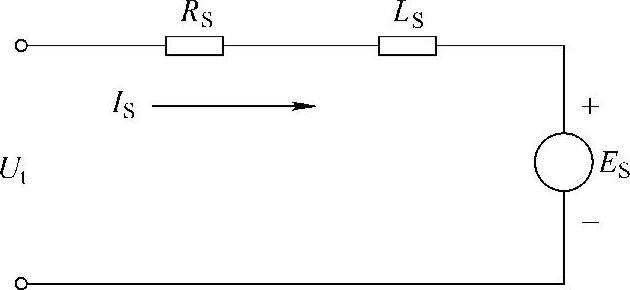
图11-6 无刷直流电机的简化等效电路

电气时间常数和机械时间常数的物理意义是:
1)电气时间常数反映了恒转速时,电枢电流响应端电压的变化所用的时间;
2)机械时间常数反应了转速响应电机转矩变化所用的时间。
11.1.2.2 无刷直流电动机驱动
图11-7为典型无刷直流电动机驱动位置和速度控制框图。如果只需要速度控制,那么位置控制器和位置闭环可以省略。通常,位置和速度反馈变换器对于高性能位置控制器而言是必不可少。没有速度传感器的位置传感器必须通过位置信号的微分获取速度。这种做法将增大模拟系统中的噪声。在数字系统中,这通常不是什么问题。但是位置和速度控制的无刷直流电机需要位置传感器,或者其他获取位置信息的措施。
很多高性能应用采用带有电流反馈的转矩控制。至少,需要直流母线电流反馈来保护驱动系统和电机,以防过电流。控制单元中的“位置控制器”、“速度控制器”和比例—积分控制器或者更高级的控制器(如人工智能控制器)一样,都是经典控制器。电流控制器和序列器为三相逆变器提供合理的序列门级信号。比较传感电流和参考电流,通过磁滞控制法或其他方法可实施电流控制。根据转子位置信息,类似于传统直流电机机械换向,序列器触发逆变器电子换向。定子每相绕组的换向角由单位电流安培数产生最大转矩来选择。
位置传感器通常是3只霍尔效应传感器或者光编解码器,也可以是分解器。相对于转子位置,电流脉冲可以发生超前相移。由于电气时间常数的影响,超前相角是需要的,因为电流建立需要一定时间。高速时,建立电流的时间缩短。而且,随着转速增加,逐渐增大的反电势将抵消电流的增加。这称为无刷直流电流的弱磁运行。和直流电机弱磁运行一样,这种运行的问题是每电流安培数产生的驱动转矩较低。
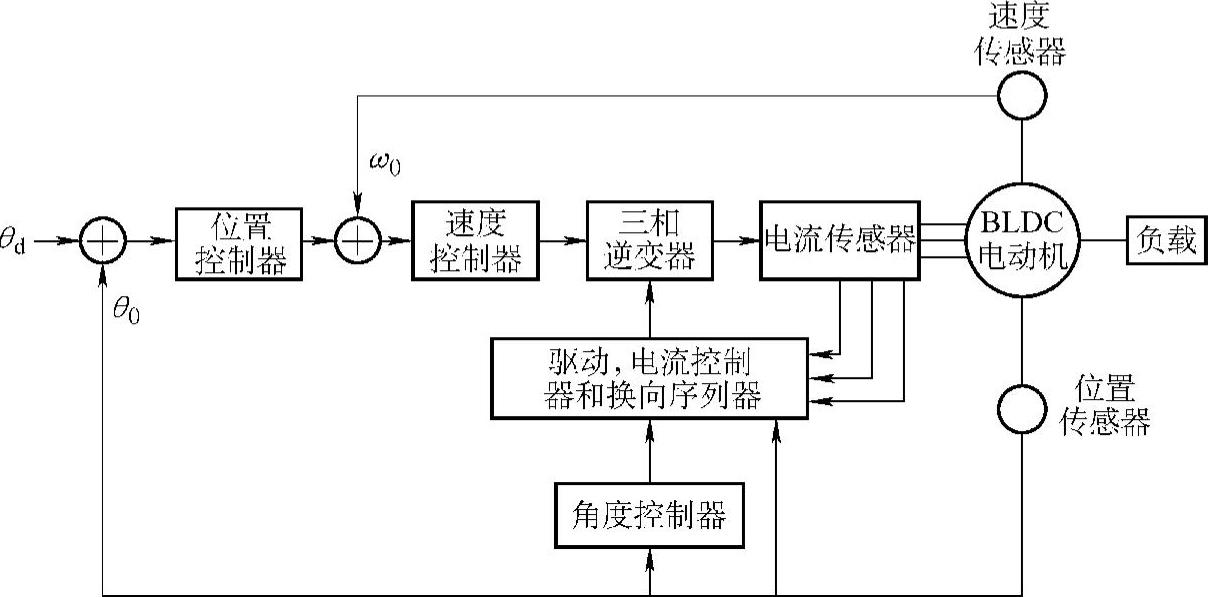
图11-7 无刷直流电机经典速度和位置控制框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。