



本节中,我们应用广义状态空间平均法得到了多变换器电力电子系统的建模方法。例如第12章中,我们对图12-1中的典型系统进行了建模。我们还对比了系统出现不同动态过程时的响应。模块化方法被用于多变换器电力电子系统的建模和分析。变换器和系统的子系统模块化后再互连形成整个系统。将系统模块化为变换器和子系统有几个优点:①变换器和子系统的模型可用于不同的系统;②通过对相对简单的子系统进行建模,减少了大系统建模的复杂性;③在容易控制的测试条件下可修改提出的模型。
图7-13所示为多变换器电力电子系统中互连的变换器。每个变换器都与处于同一级的其他变换器一起从前级变换器取电压源,然后输出到下级阻性负载和负载变换器1,…,N。所有的阻性负载都用电阻R表示。
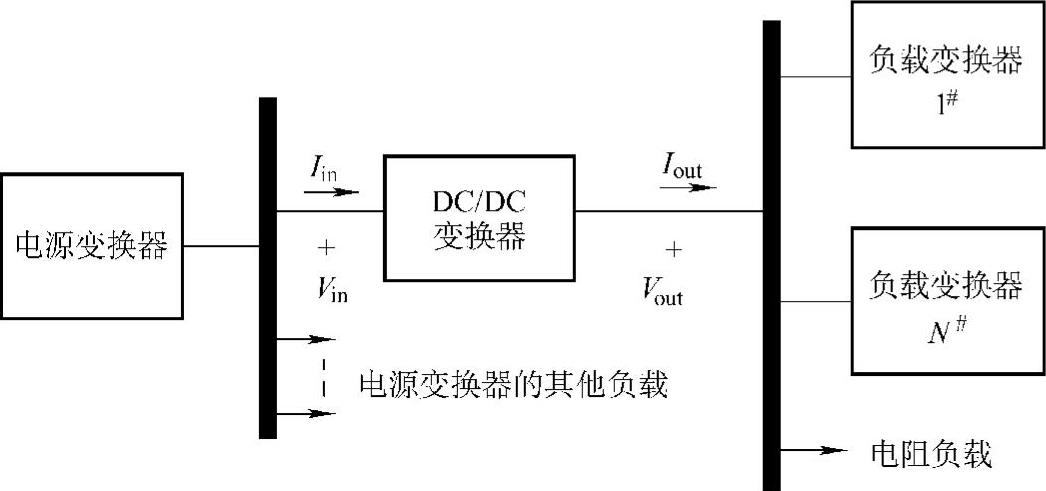
图7-13 多变换器电力电子系统中的互连变换器
7.4.3.1 多变换器电力电子系统中的DC/DC变换器
本节中,我们假设图7-13中的变换器是工作在连续导电模式下的PWMDC/DCBuck、Boost、Buck-Boost或Cuk变换器。它的开关周期为T,占空比为d。为了采用广义状态空间平均法,首先定义一个换算函数u(t):

这个换算函数取决于电路开关控制,电路开关控制要根据电路拓扑结构的改变来确定。
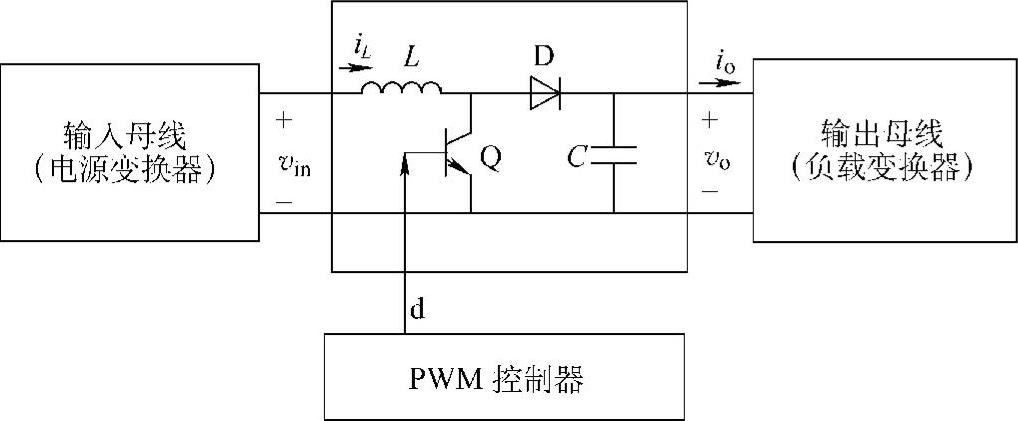
1.Buck变换器
图7-14所示为一个DC/DC PWM Buck变换器。通过将式(7-6)代入两组拓扑电路的状态空间方程可得一组统一的电路状态变量等式。
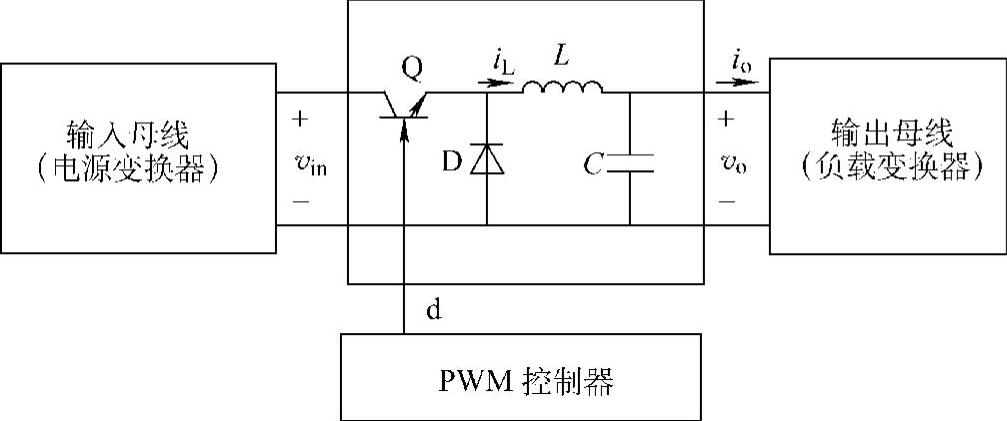
图7-14 DC/DCPWMBuck变换器
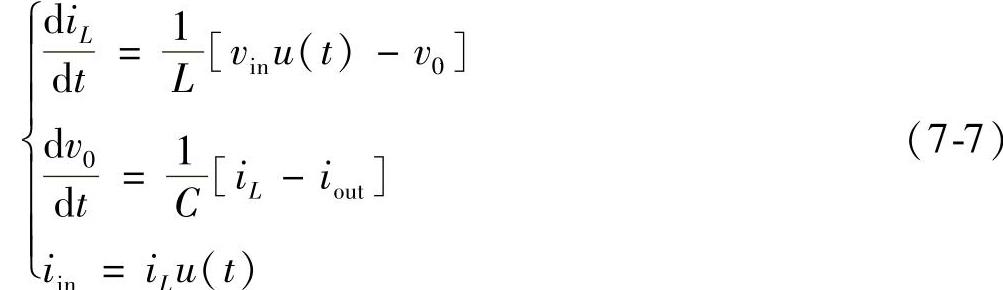
在广义状态空间平均模型的方程组中,真正的状态变量为电路状态变量的傅里叶系数,在这种情况下为iL和v0。用一阶近似可得到iL和v0,从而得出下列6个实状态变量:

因为iL和v0为实数:

式中 “∗”——共轭复数。
利用式(7-7)中傅里叶系数的时间导数,进一步替换换算函数u(t)的傅里叶系数:
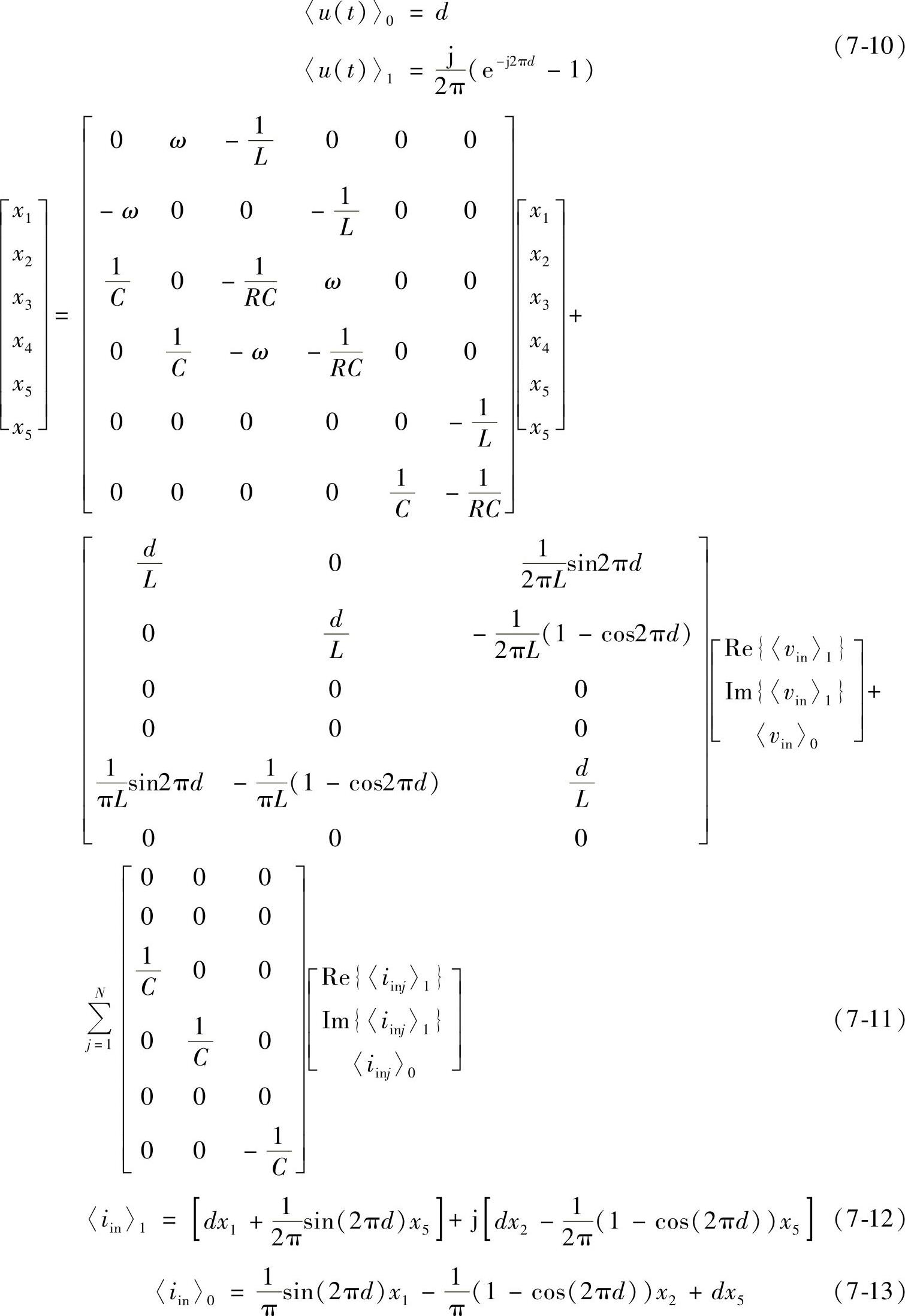
式中 iinj——第j个负载变换器的输入电流,R——变换器的阻性负载。式(7-11)~式(7-13)反映的是Buck变换器的状态空间平均模型。电路状态变量计算式如下:

2.Boost变换器
图7-15所示为一个DC/DC PWM Boost变换器,将式(7-6)代入两组拓扑电路状态空间方程可得一组统一的电路状态变量等式:

与Buck变换器一样,采用广义状态空间平均法可得如下变换器的状态空间方程:
 (https://www.xing528.com)
(https://www.xing528.com)
图7-15 DC/DC PWM Boost变换器
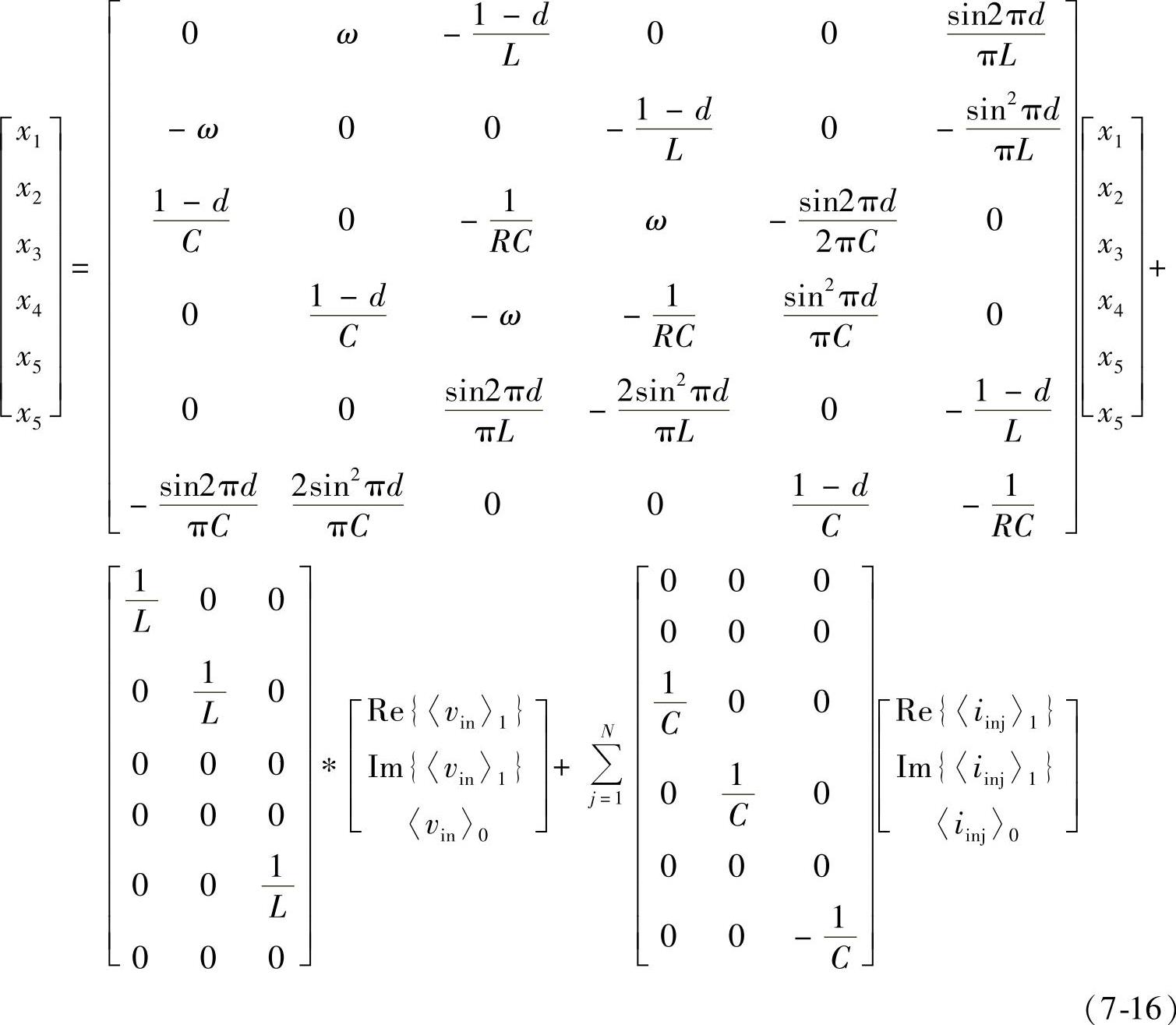
3.Buck-Boost变换器
图7-16所示为一个DC/DC PWM Buck-Boost变换器,将式(7-6)代入两组拓扑电路状态空间方程可得一组统一的电路状态变量等式:
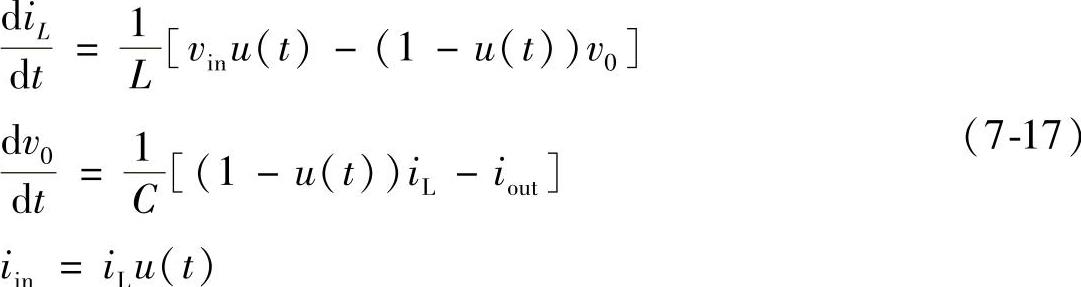
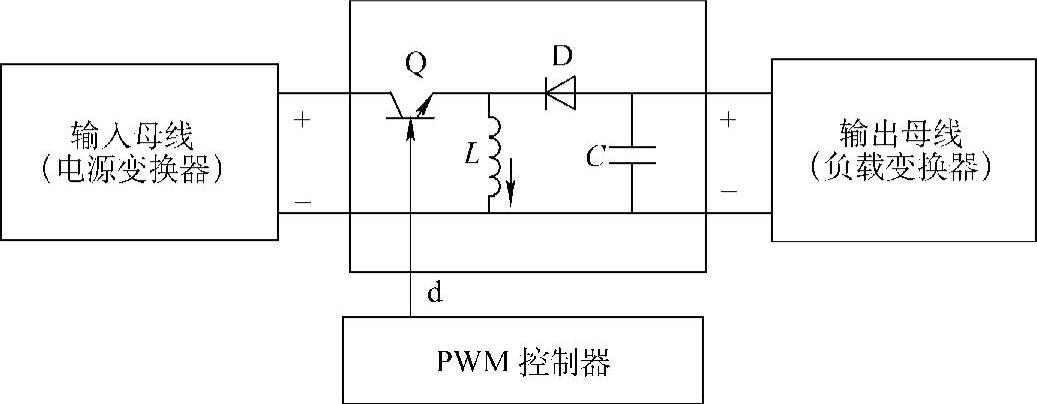
图7-16 DC/DC PWM Buck-Boost变换器
与Buck变换器一样,采用广义状态空间平均法可得如下变换器的状态空间方程。

7.4.3.2 多变换器电力电子系统中的DC/AC逆变器
图7-17所示为一个单相电压源DC/AC逆变器,它连接图12-1中典型系统的3号总线和交流总线。我们假设逆变器的输出侧与一系列RLC负载相连。
根据逆变器的控制特点,便可确定换算函数u(t),可得逆变器交流侧的状态方程:
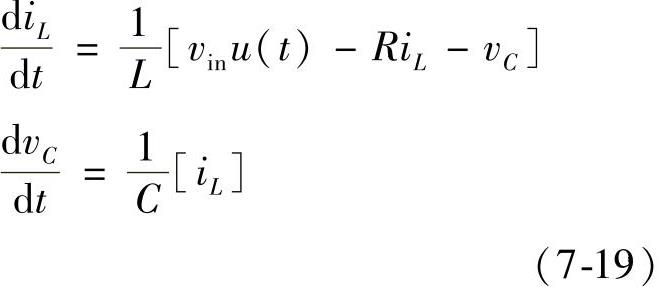
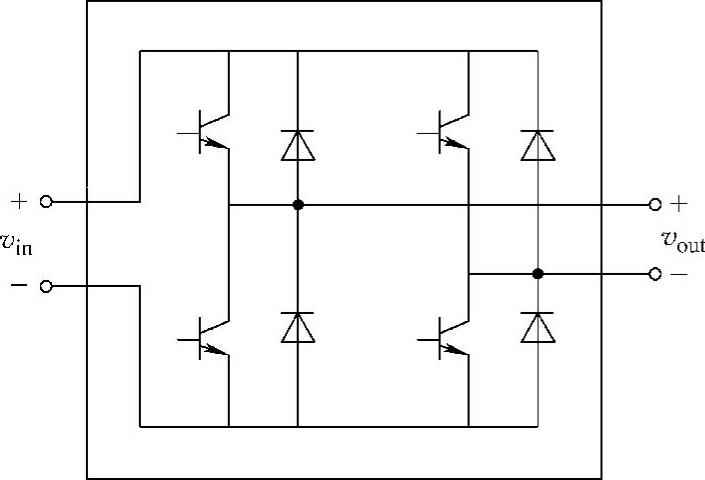
图7-17 单相DC/AC逆变器
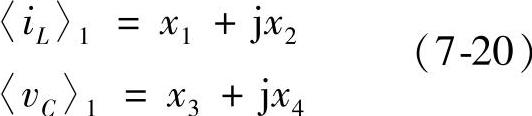
我们使用广义状态空间平均法的一阶近似对逆变器建模。可得如下4个实状态变量:
对于方波逆变器,将换算函数u(t)定义为:

换算函数的一次谐波为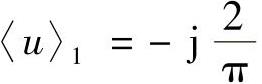 。代数运算后可得最终的状态空间方程为:
。代数运算后可得最终的状态空间方程为:
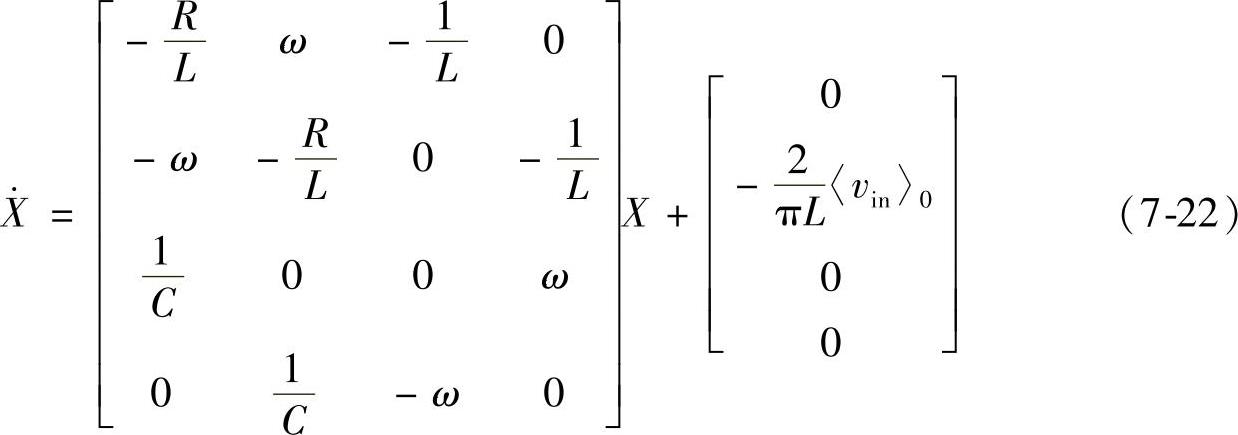
其中ω为方波逆变器的角频率。设ω0为RLC负载的固有频率。当ω≥ω0时,一阶近似可以很好地描述电路的表现。但当ω<ω0时,对于存在的高阶谐波,如对 的三阶谐波来说,会产生很大的误差。这是因为RLC电路带宽不能有效地过滤
的三阶谐波来说,会产生很大的误差。这是因为RLC电路带宽不能有效地过滤 的谐波。
的谐波。
7.4.3.3 参数对广义状态空间平均法的影响
前面已经提过广义状态空间平均法的一种近似方法,即忽略高阶谐波。这种方法与所需的精度有关。如果采用K阶近似,那么就忽略比K更高阶的傅里叶系数。但另一方面,状态变量波形的快速变化依赖于高阶傅里叶系统。所以一阶或二阶近似不能完全反映波形的快速变化。由于感性电流波形有尖峰,当采用上述方法计算电流波形时会产生很大的误差。而输出电压变化较慢,所以误差较小。
从单独运行状态下单只变换器的仿真可知,当开关频率略微高出固有频率时,近似阶数的多少对提高模型的精度很重要,尽管提高阶数会增加计算量。另外还可以看到当占空比在0.5附近(无偶次谐波)时,对于特定变量而言,一阶近似的广义状态空间平均模型得出的结果比相应拓扑模型更准确。同时还可以看到,与元件数量相关的拓扑结构的复杂程度并不能确定近似阶数,所以不能得到一个令人满意的模型。
变换器动态变化越复杂,它达到稳定位置就越慢。状态空间矩阵的非零项代表了变换器的动态复杂性。另一点值得一提的是,除了变换器的动态性,状态变量的类型对暂态衰减速度也有影响。例如,容性电压的衰减速度就比感性电流高得多。
此外,假设变换器的参数保持不变,当变换器复杂程度增加时,一般会产生更大的误差。例如,Buck-Boost变换器的误差就比Buck变换器要大。换言之,变换器的动态特性会影响模型的精度。这是因为它可以被分解为一系列低阶系统。根据系统控制理论,方阵的非对角项(如Jordan块之外的项)越多,系统就越复杂。这和所谓的变换器动态复杂性是同样的问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。