



电机既可以运行在发电模式,也可以运行在电动模式。在电动模式下,可以利用电能驱动机械负载,而在发电模式下,则可以利用机械原动力产生电能。图3-1和图3-2是电机运行的典型图形表示。图3-1和图3-2描述的是三相电源,还有单相或直流供电的。在下一章节,我们将会考察这些电机的基本运行原理、特性和驱动方程。
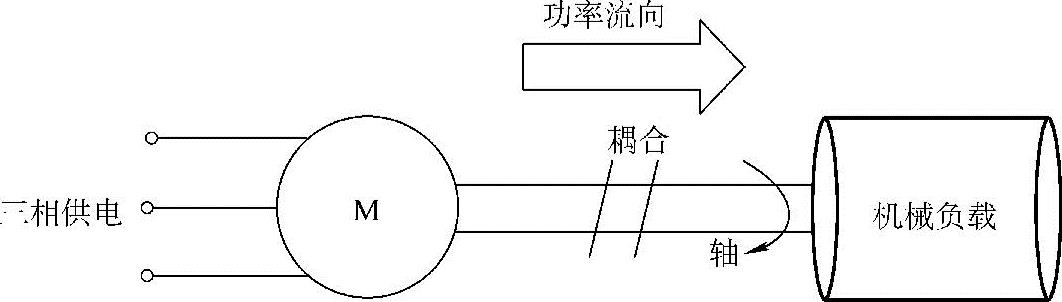
图3-1 电动模式下典型电机示意图
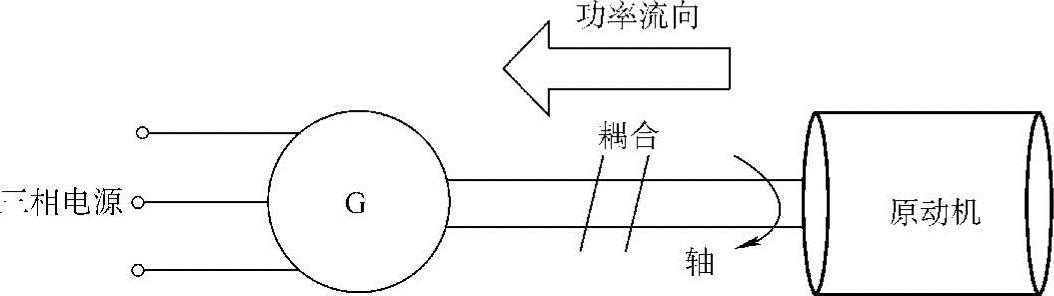
图3-2 发电模式下的典型电机示意图
在机电系统中,我们感兴趣的基本参数是位置、速度、加速度、转动惯量、摩擦力和转矩。明晰这些参数之间的关系式是非常重要的。下式定义了这些参数之间的关系。
加速度:a=dω/dt
角速度:ω(t)=ω(0)+∫a(τ)dτ
位置:θ(t)=θ(0)+∫ω(τ)dτ
电功率:Pem=Temω
负载功率:PL=TLω
动能:K=Jω2/2
角速度会因为功率和转矩而发生变化。一般保持一个参数为常数,而通过改变另一个参数以改变速度,如功率可以定为常数,则速度随转矩线性变化,又或者转矩保持为常数,则速度随功率线性变化。转矩和速度之间的关系可以从下式得到:

式中 T、Tr、n、nr和k——转矩、额定转矩、速度、额定速度和指数因数。不同的转矩-速度特性可能拥有不同的k值。系统瞬态机械方程如下:
 (https://www.xing528.com)
(https://www.xing528.com)
式中 Tem、TL、J和B——电磁功率、负载转矩、转动惯量和轴承摩擦因数。
在机械系统中,为了改变速度往往采用齿轮机构。下面的图示就是解释轴上的齿轮是如何改变速度的。
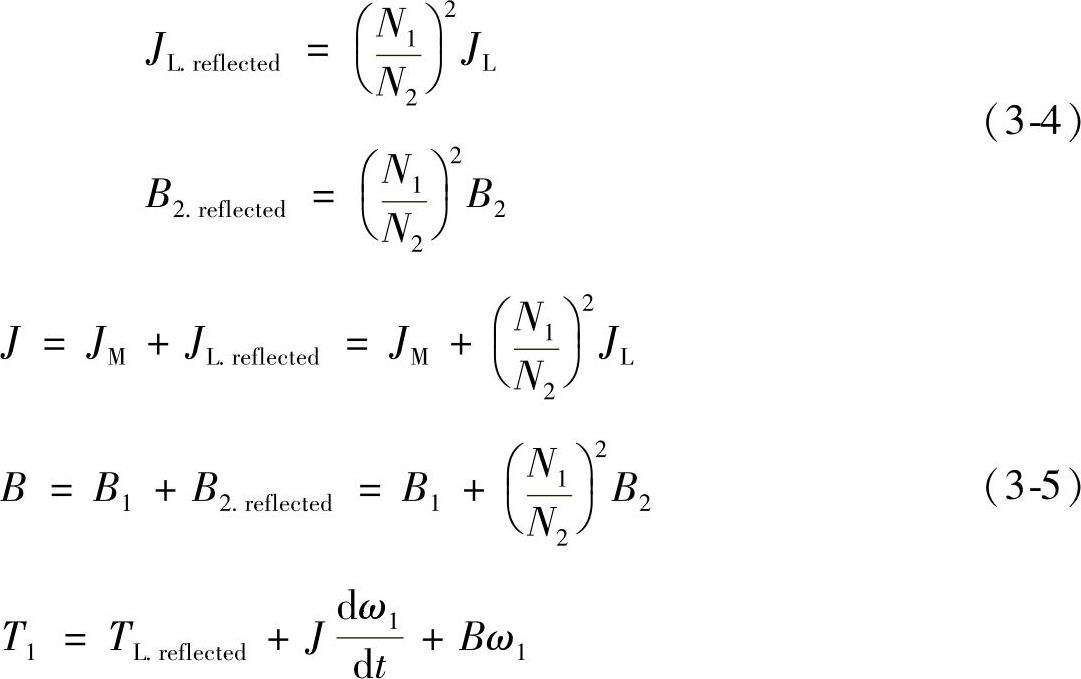
对于图3-3的齿轮系统,有如下公式:

式中 N1、N2——齿轮数;
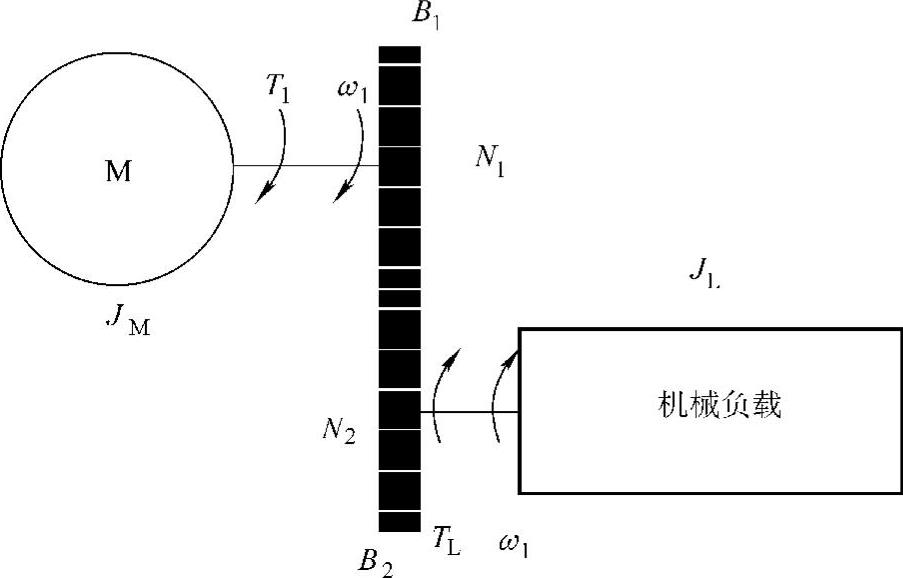
图3-3 采用齿轮的典型机械连接
ω1、ω2——电机和负载的角速度;
B1、B2——电机和负载的轴承摩擦因数;
T1、TL——额定电磁和负载转矩。
电机系统应该对机械系统运行做出响应,因此需将机械系统侧参数折算到电机侧。
根据转矩方向或轴旋转方向,电机既可以工作在电动模式也可工作在发电模式,相应的机械系统既可以工作在负载也可以工作在原动机模式下。将它们综合,可以得到电机系统四象限状态图,如图3-4所示。
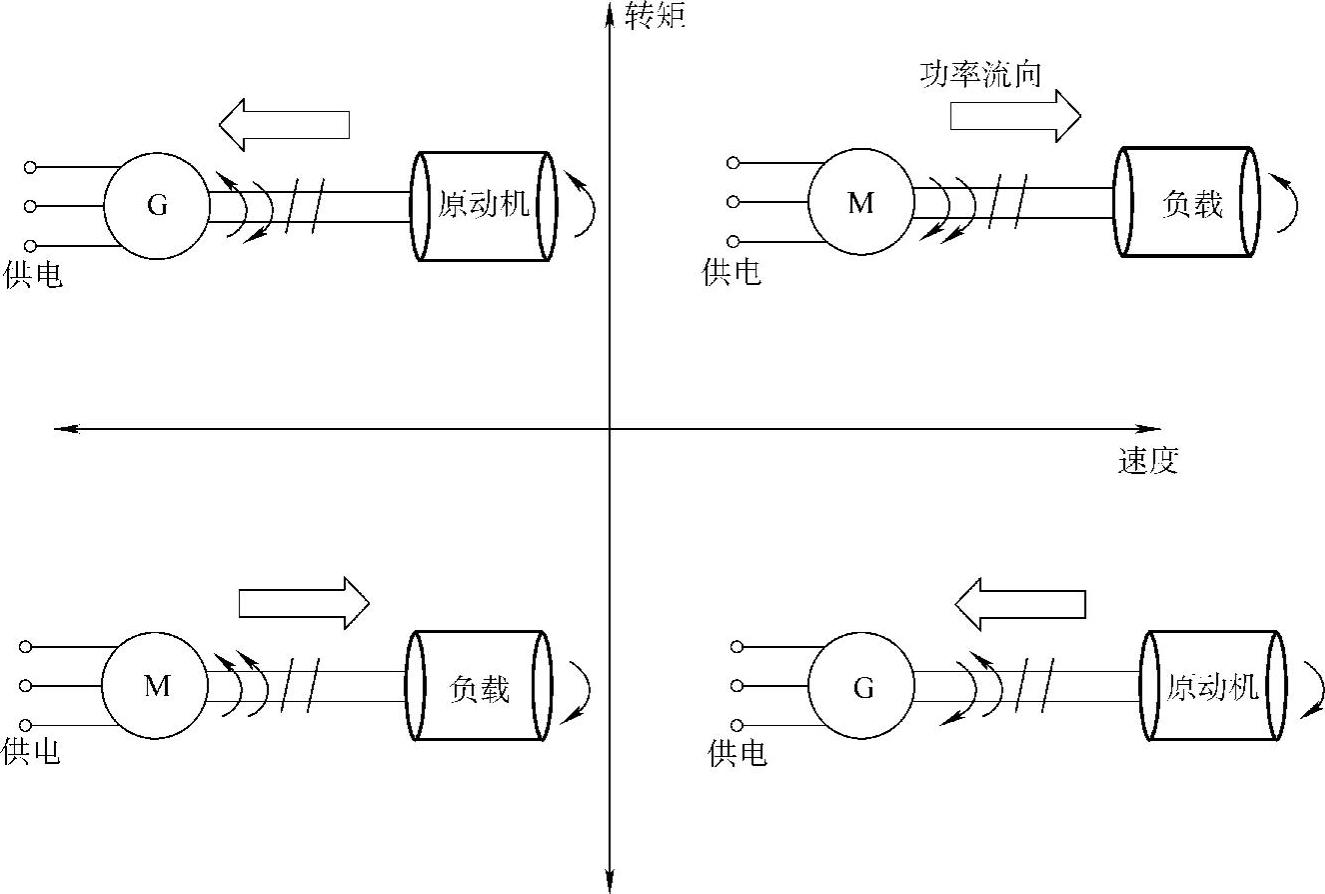
图3-4 四象限状态图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。