



最初的车身姿态控制系统中纵向加速度传感器、横向加速度传感器和横摆角速度传感器都是单独实现的。随着科技的发展,现在基本都使用了传感器总成(sensor cluster)的模式,即将其中的两个或三个传感器设计为一体与ECU连接。最常见的组合传感器为横向加速度传感器和横摆角速度传感器的组合。
与ECU连接通信的方式有两种:一种是普通线束连接;一种是采用新兴的CAN(控制器局域网)总线与控制单元间以双绞线进行通信。
1.使用一般电线连接的组合传感器
一汽马自达6轿车的DSC系统采用了组合传感器,组合传感器安装在驻车制动杆的左侧,由横向加速度传感器与横摆角速度传感器组合而成,用以探测车辆横摆率(车辆转角速度)以及横向惯性力并把信号传输给DSC HU/CM(动态稳定控制液压控制单元)。当传感器探测到旋转转向叉的转动速度所产生的自转偏向力(科氏力),就会按比例形成横摆角速度。当传感器探测到作用在硅检测部件上的惯性力时,就会按比例形成横向惯性力。当车辆保持静止,组合传感器输出横摆角速度信号和横向惯性力信号电压为2.5V,并随着横摆角速度以及横向惯性力变动。组合传感器的外形与输出特性如图8-72所示。
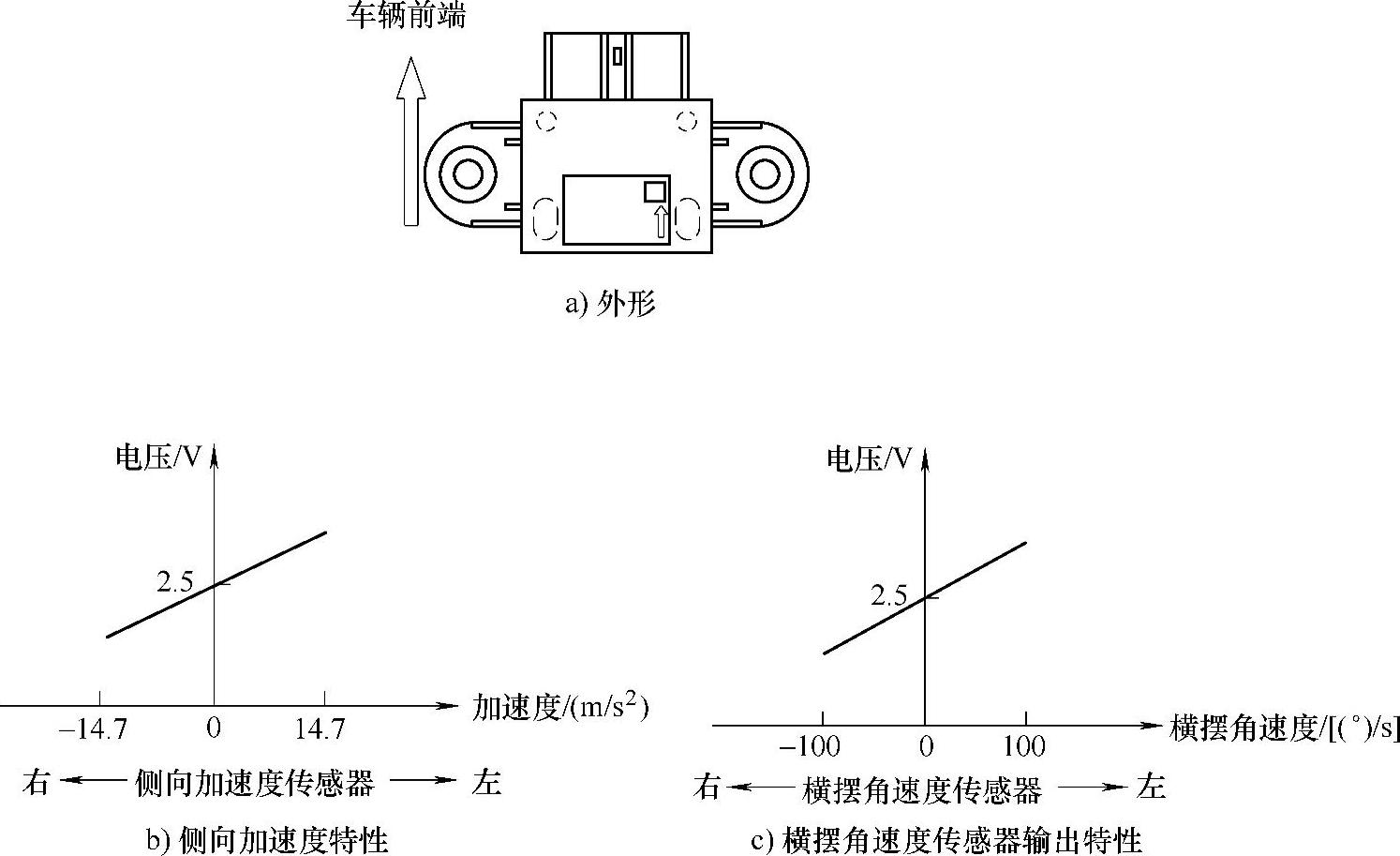
图8-72 组合传感器的外形与输出特性
组合传感器与DSC HU/CM的连接和各端子的功用见图8-73和表8-6。
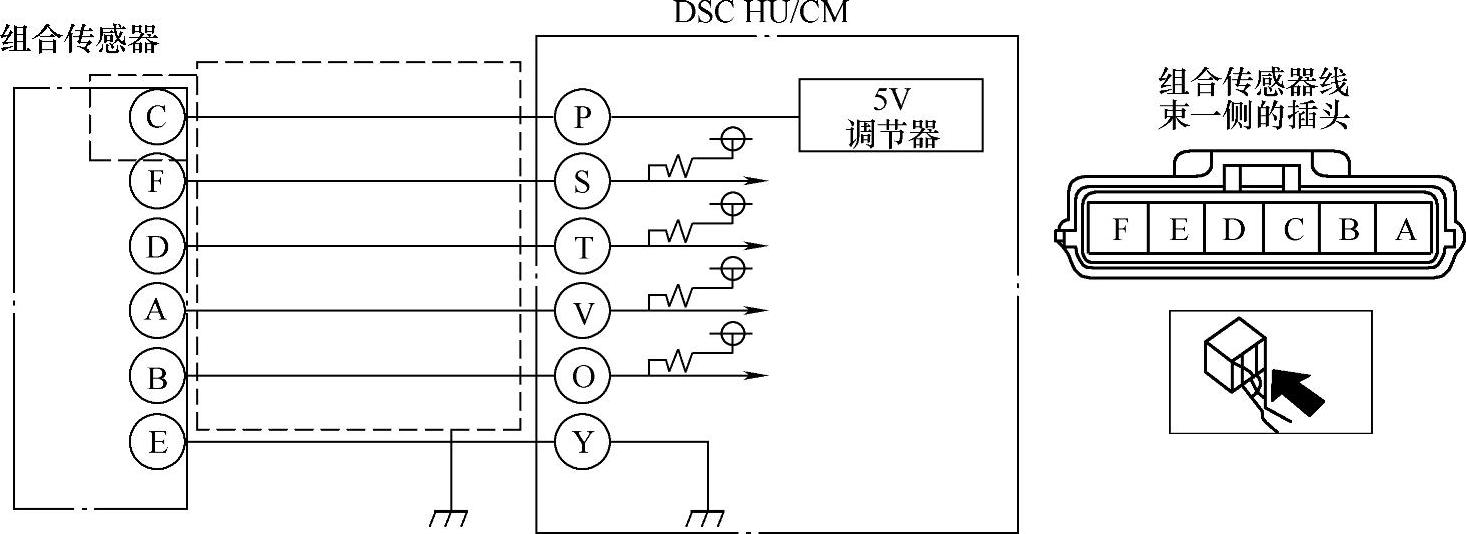
图8-73 组合传感器与DSC HU/CM的连接和端子示意图
表8-6 组合传感器、DSCHU/CM各端子功用

在检测组合传感器时,应注意不能让传感器跌落,如果传感器受到强烈冲击,应更换。
组合传感器的检测方法如下:
1)电源检测。将点火开关旋转到接通的位置(发动机关闭),测量组合传感器的端子C(线束一侧)和地之间的电压,电压应在4.5~5.5V之间。
2)搭铁电路检测。将点火开关旋转到断开的位置,断开组合传感器,测量组合传感器线束侧的端子E与蓄电池负极之间的导通性,正常应导通。
3)横向加速度传感器的检测。连接插头,接通点火开关,根据下列内容检查端子B和E之间的电压。如果不满足要求,说明横向加速度传感器有故障,则应更换横向加速度传感器。
①水平,B和E之间的电压应为2.4~2.6V。
②顶面向上(与水平面上倾90°),B和E之间的电压应为3.3~3.7V。
③顶面向下(与水平面下倾90°),B和E之间的电压应为1.3~1.7V。(https://www.xing528.com)
4)横摆角速度传感器的检测。在静态条件下,测定横摆角速度传感器的电压。当摆动速率传感器左右旋转时,测量端子D与E之间电压应符合规定,即:向右旋转,在2.5~4.62V之间波动;向左旋转,在2.5~0.33V之间波动。
如果不符合,则应更换横摆角速度传感器。
注意:应注意旋转横摆角速度传感器时的旋转位置,因为旋转方向和电压方向相反,所以旋转位置处于相反状态。
5)解码检测。诊断DSC系统时,可用WDS读取故障码,然后根据相关故障码的含义进行相应的维修。当诊断到故障码DTC1280、DTC1730、DTC1951、DTC1952和DTC1959时,参考表8-7故障码设置说明,对组合传感器进行更换或检测线路。
表8-7 故障码与设置说明

2.使用CAN-BUS连接的组合传感器的检测
新皇冠采用CAN-BUS连接的组合传感器,其电路图和端子形状如图8-74所示。
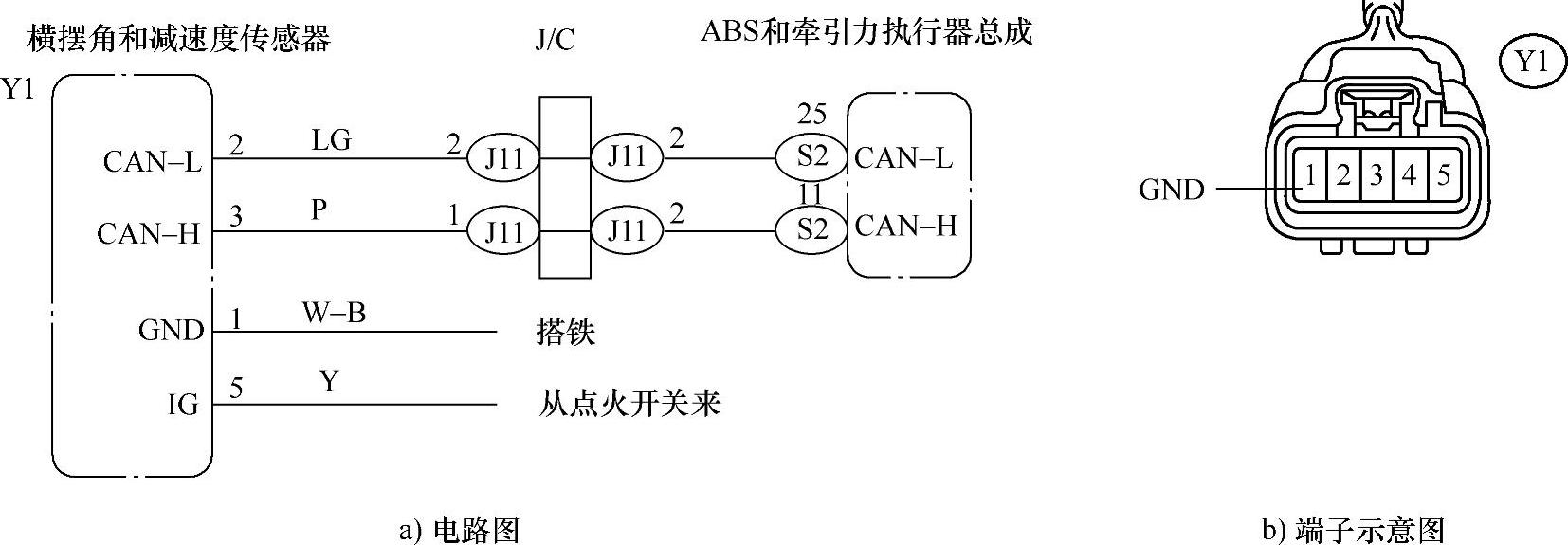
图8-74 新皇冠采用CAN-BUS连接的组合传感器电路图和端子示意图
检测方法如下:
1)电源检测。关闭点火开关,断开横摆角和减速度传感器插头,打开点火开关,用万用表电压档测量线束端5号端子与搭铁间电压,正常值应在10~14V之间。
2)搭铁检测。关闭点火开关,断开横摆角和减速度传感器插头,用万用表电阻档测量线束端1号端子与搭铁间电阻,正常电阻值应小于1Ω。
3)解码器检测。由于该组合传感器使用CAN-BUS进行通信。因此检测主要应依靠解码器来进行。组合传感器的故障码见表8-8。
表8-8 组合传感器的故障码

注:C1243/43、C1245/45、C1232/32具体故障点需查阅维修手册。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。