



对机动性进行研究的历史可追溯到20世纪初。尤其是以贝克(M.G.Bekker)为代表的一批科学家在地面力学以及车辆可行驶理论方面的努力,为机动性的研究作出了开拓性的贡献。早在1913年,德国科学家伯恩斯坦(R.Bernsiein)提出了被动车辆下陷深度和地面接地压力关系的研究;此外,还有1944年英国战车研究所与发展机构的密克莱威(E.W.E.Micklethwait)对驱动车轮土壤推力的研究;以及1950年以后贝克对土壤下陷和行驶阻力以及随后对车辆与地面之间关系的一系列重要研究成果。
说到机动性分析就不能不提20世纪70年代以来,以美国陆军为首的机动性研究计划。该计划产生了至今仍然对军用车辆具有深远影响的机动性分析模型。美军出于其全球战略的需要,十分重视车辆越野机动性能力的研究,早在第二次世界大战期间,为了获得最佳的车辆设计和车辆性能所需的定量资料,美军就开始了车辆地面可行驶性地图的绘制。早在20世纪60年代前,美军就开始对军用车辆的机动性能展开了系统的研究,目的是为军用车辆的设计、采购和部署提供依据。20世纪60年代以后,伴随车辆-土壤模型和车辆-地形模型的相继建立,用计算机来评定和研究车辆越野机动性的方法逐渐取代了原来的半经验性质的研究方法。20世纪60年代中期,为辅助军用车辆设计、采购和部署的决策,美军装备部(AMC)制定并执行了一项地面机动性的研究计划。该计划由美军工程部队水道试验站(WES)、美军寒区研究及工程实验室(CRREL)和史蒂文斯技术研究所(STI)承担。研究结果形成了以计算机模拟为基础的越野机动性分析模型,先后正式发布了AMC-71和AMM-75两个版本。这种用计算机来模拟车辆越野机动性的研究首次由称为AMC-71机动性模型的计算机程序来实现。该模型于1971年启用,根据启用后的鉴定试验结果和用户意见,为使该模型精度更高,适用范围更广,于1975年研制出了第二代越野机动性模型:Army Mobility Model-75(AMM-75)。在AMM-75模型中比AMC-71多了一个新的越障模块,该模块用于模拟二维(中心线平面)车辆在通过任何外廓形状的单个障碍或任意顺序的这种单障碍组合时的车身俯仰角、位置、干涉情况和驱动力要求。AMM-75模型的建立,标志着美军对车辆越野性能的研究日益成熟。1978年,AMM-75推荐给北约作为标准的机动性模型,同时,还专门组织了由北约成员国、美军坦克汽车司令部(TACOM)、WES及陆军研究实验室下的AMSAA组成的技术委员会监督MRMM的技术工作。该模型更名为北约参考机动性模型(NATO Reference Mobility Model,NRMM),1979年发布第一版,较新的版本有NRMMⅡ(1992)版本,并作为美国陆军和北约成员国的军队进行机动性评估的标准分析模型。NRMM是一个对车辆在道路和越野条件进行机动性能分析预测的综合软件包。经过多年的改进,现今NRMM已被U.S Army Waterways Experiment Station(WES)和U.S Army Tank-automotive and Armaments Command(TACOM)发展成为一项成熟的技术,成为美国陆军和北约成员军队进行机动性评估的标准分析程序。该程序中的分析模型主要依据包括车辆与地面的详细特征的各种输入数据,以及其他影响车辆速度而与车辆动力无关的因素和人的因素,来预测车辆在指定的地面上“能通过/不能通过”(GO/NOGO),并预测通过的最高车速。
随着NRMM的日益成熟,它的应用也越来越多。采用NRMM可对无人驾驶实验车辆(Experimental Unmanned Ground Vehicle(XUV)DEMOⅢ)的越野机动性能进行全面细致的分析,为性能评估和改进设计提供有力的证据。再如,利用NRMM中的动力学分析模块,还可对重型战术车辆在不平道路上行驶的动态性能进行分析和预测,从而提出改进机动性的建议。
从程序构成来看,NRMM模型具有非常丰富的子程序,如动力传动性能分析子程序、车辆牵引机构/地面作用子程序、坡道行驶分析子程序、车辆/几何障碍分析子程序(越障模块)、车辆平顺性分析子程序、车辆/植物作用分析子程序等。以下对北约机动性分析和预测模型进行一个简要介绍。
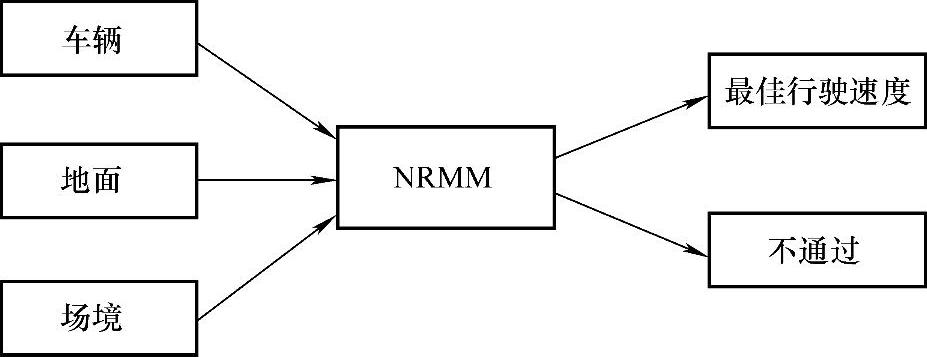
图4-1 NRMM程序总体框架
图4-1为NRMM程序的总体框架。其中,车辆、地面和环境(场景)作为输入的内容,经过NRMM程序运算得到车辆的平均行驶速度和不通过程度(概率)。
其中,车辆的牵引性能分析模型的主要思路为:首先,针对不同的车辆传动系和行驶系以及地面特性得到一个理论牵引特性(牵引力与速度的关系)曲线,再由地面的实际特性(如土壤的承载能力)对理论的牵引特性进行修正(图4-2),得到实际的牵引特性曲线;然后,根据实际情况考虑各种速度影响因素,如由土壤阻力、坡道阻力、凹凸不平地面的阻力、植被阻力、涉水阻力构成的各种阻力,并与牵引特性进行比较得到一个由外力控制的可能的行驶车速;此外,对一些其他速度限制因素进行分析,如越野平顺性、越障冲击、视野范围、需要绕过的树木或障碍、制动性能、轮胎的限制速度等,得到一系列的限制速度(S1、S2、S3……),将以上这些速度进行比较后,得到一个“最佳行驶速度”(Speed-Made-Good)。
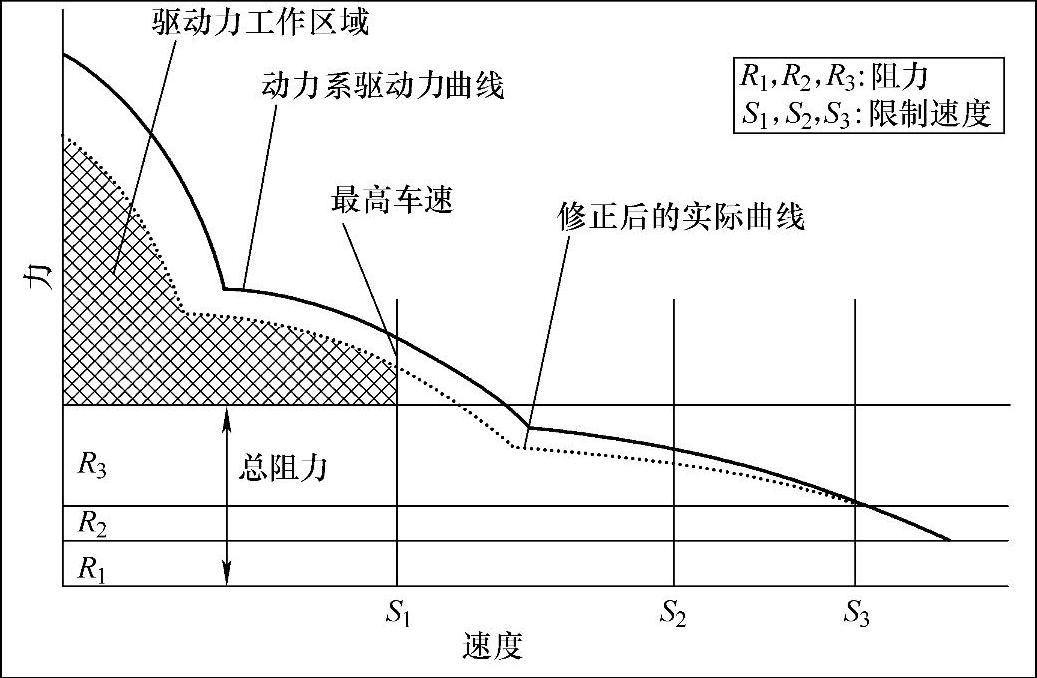
图4-2 NRMM牵引特性
至于在一定的地面上能够通过(GO)或不通过(NO-GO)的预测,主要考虑以下情况:
1)车辆在支撑条件较差的极其松软的地面上行驶时,由于轮胎下沉引起的阻力较大,使得车辆无法通过。
2)车辆通过连续障碍时,车辆底部结构与地面干涉,当干涉量较大时,不能通过,当干涉量较小时,给出了统计形式的NOGO概率。
3)当通过较大的障碍(包括坡度),车辆自身动力无法克服时。
4)树木间隔过于密集的森林。
5)遇到无法通过的水障。
6)在极为恶劣的环境以及危险的情况下。
需要输入的车辆参数包括车辆行驶总成的形式和数量、质量分布特性、牵引特性曲线、越障和平顺性的门限值、制动性能信息以及驾驶人的视野信息(如驾驶人眼睛离地高度)等。(https://www.xing528.com)
地面信息是以一个个地面单元的信息组成,每一单元的地面特征是一致的,描述的信息包括坡度、土壤类型、季节性的土壤强度、植物特点(如尺寸和密度)、季节性的能见度、地面的不平度、障碍(突起障碍和壕沟)尺寸和几何参数。
场境数据包括前面天气条件、植物的跨越策略等。例如要考虑是干燥还是湿滑的环境情况;可根据不同的地区,具体到给出是哪一月份的气候条件。
目前,该模型几个子程序有动力传动性能分析子程序、车辆牵引机构/地面作用子程序(软地面和硬地面)、坡道行驶分析子程序(纵向和横向)、车辆/几何障碍分析子程序(地面宏观几何)、越野平顺性分析子程序(地面微观几何)、车辆/植物作用分析子程序、制动分析子程序、曲线运动分析子程序和通过水障分析子程序。其他还包括空气阻力计算、轮胎阻力计算、最大轮胎行驶速度、铲土阻力计算等各个子程序,雪地行驶阻力计算子程序是新完成的子程序。以下为几个主要子程序的功能:
(1)动力传动性能分析子程序 可以通过传动系部件的参数计算预测理论牵引力和速度,传动系部件包括发动机(主要通过转矩与转速)、变速器(主要是传动比和效率),还可以计算液力变矩器、主减速器和滚动半径等,最终得到牵引力与速度的关系曲线。程序也可以使用野外牵引试验曲线。
(2)车辆牵引机构/地面作用分析子程序 可以计算土壤或路面所能提供的最大牵引力、运动地面阻力和车轮的滑移率。目前可以针对不同的地面特点对五种地面进行计算,它们是细纱土壤、粗沙土壤、有机土壤、硬地面(道路)和雪地。目前正在研制的有冰冻和融化后土壤以及深雪覆盖土壤的子程序。这些计算将和第一部分的计算合并产生实际可以应用的操作牵引力曲线,然后再与各种行驶阻力一起可以预测车辆的行驶速度。
(3)坡道行驶分析子程序 坡道行驶分析子程序可提供车辆在纵向倾斜平面上行驶时的坡道阻力和牵引力修正系数;对横向坡道行驶可以预测车辆在各种条件下倾翻的临界车速。
(4)车辆/几何障碍分析子程序 主要提供越障时的最大和平均受力以及根据车辆结构和障碍尺寸计算的最小离地间隙。在一段区域中可以提供障碍的间隔密度。计算结果将给出车辆是否可以越过障碍(区)的统计判断。如果能够越过,将提供相应的越障力和由于冲击所限制的最大车速。在障碍之间可以计算加速度和制动;这样可以将车速进行控制,可以预测越障的平均速度。越垂直障碍的极限车速的计算应用到了车辆动力学分析方法。野外试验的结果也可以提供给该子程序。
(5)越野平顺性分析子程序 主要考虑地面不平度带来的影响以及人体承受振动的极限对车速的限制。人体承受振动的极限用平均垂直吸收功率来计算。土壤的信息用土壤表面不平度(均方根值)来计算。土壤的不平度用滤波的方法将波长大于3.048m的波去掉。野外试验的结果也可以提供给该子程序。
(6)车辆/植物作用分析子程序 该程序提供车辆越过一组给定直径和分布密度的植物(树木)所需要的最大推力和平均推力。程序提供车辆是否越过还是绕过的最佳方式。
(7)制动性能分析子程序 该程序提供在给定的安全距离范围内,车辆的速度限制。安全距离由地面的视野距离和驾驶人的视野进行比较后确定。
(8)曲线运动分析子程序 该程序计算车辆在一给定的转向半径上,避免滑移、滑转和倾翻所限制的车速。该程序也可以不通过计算,直接由美国高速公路和运输机构(Amerian Assosiation of State Highway and Transportation Officials,AASHTO)提供速度限制数据,但该信息一般过于保守。
(9)通过水障分析子程序 该程序提供由于水的浮力和流体动力学影响造成的牵引力的变化。GO/NOGO界限根据水深和车辆的涉水能力来确定。
(10)后处理程序 NRMM具有强大的后处理程序,以满足不同用户的需要。输出可以以报告的形式,提供各种统计预测的结果。可以模拟车辆从一个地点到另一地点的运动轨迹,加速和减速(制动)乃至整个时间历程都可以模拟出来。
行驶速度模式和机动性评估速度可以通过专门的后处理程序输出并提供报告。另外,还有一个显示程序可以形成一个彩色的地图显示车辆的平均行驶速度和NOGO区域。
自从1979年公布了NRMM第一个版本后,相关组织定期召开会议,程序也在不断进行更新和功能的增强。改进的内容包括程序算法的改进、模型的改进和输出形式的改进等。每年由各个部门(包括USAE、WES等)专家组成的相关的委员会都要对修改的版本进行表决。例如最近的一次重大改进包括:①建立了基于土壤和车辆的随机数据库的随机机动性车辆速度分析模型;②提出了更先进的机动性模型的算法,减少了原先的一些基于经验数据的算法,这使得程序对机动性分析更加准确可靠,不仅适用于机动性评估,而且适用于作战部门、装备研发部门以及政府使用,其中的分析结果和方法已经逐渐成为有关部门依据的标准;③增加了一些新的行驶条件和分析的模型,如雪地行驶模型。
国内学者对机动性的研究主要是在20世纪70年代以后。例如,原吉林工业大学的庄继德教授,多年从事地面力学以及与车辆通过性相关的研究工作。军内专家在我军轮式车辆分类、机动性概念的阐述与分级等方面进行了诸多探索和研究工作。我军汽车试验场自20世纪60年代开始就一直致力于军用车辆考核与评价的条件建设,目前已具备了相当的实力。例如:试验场具有泥泞路、沙地、沼泽地、水网稻田等多种地面通过性考核设施;结合战场环境,建设了弹坑、路沟、凸岭、水池等多种地形;此外,还建设了砂石路、碎石路、坑洼路、连续迹弯道、起伏路、侧坡等多种道路。其科研团队在多年为军队承担定型、鉴定试验的过程中积累了丰富的理论和实践经验。总后车船研究所和总后汽车试验场还曾根据计划项目89185-5起草了GJB 1380-1992《军用越野汽车机动性要求》,并由国防科学技术工业委员会于1992-07-18发布,1993-03-01实施。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。