



(1)特性说明驾驶员奖励特性通过鼓励节省燃油,进而修正驾驶员的行为。理想的驾驶行为是这样的:怠速时间百分比低、高速档时间百分比高和每加仑燃油行驶里程数高,会被奖励更高的道路车速调速器(RSG)、巡航控制的极限值。驾驶员用ESP操纵发动机也会被奖励在转矩传送期间加快向高转矩输出转换。该特性监测正常间隔时的驾驶员的行驶燃油经济性和行驶怠速时间百分比,并将它们进行平均,一旦达到客户选择的阈值标准,就给予驾驶员奖励。监测的行驶信息持续将驾驶员效率数据进行平均,并据此更新奖励水平,直到使用服务软件复位。当行驶信息复位时,完成“驾驶员奖励记录”设定。在安装了选装件康明斯“RoadRelayTM”时,驾驶员可以持续读取自己的实时表现和当前的“驾驶员奖励”水平。驾驶员在获得预编程的公司燃油经济性和所用的怠速时间标准后,可以受到速度奖励,对装有ESP的车辆,可以受到加快向高转矩转换的奖励。
对于没有取得预编程的公司燃油经济性和所用的怠速时间标准的驾驶员,会受到降低最大车速的惩罚,对装有ESP的车辆,将延长向高转矩转换来给予惩罚。
配置“驾驶员奖励”可分两步完成,首先设定公司燃油经济性和怠速时间标准,然后再设定“驾驶员奖励”选项和级别。要设定公司燃油经济性和怠速时间标准,以便确定具体的“驾驶员奖励”,必须设定性能目标和定义最佳、良好、期望的燃油经济性和怠速标准。
如果车辆配备有ESP,可通过改变向高转矩转换的应用来给予额外的奖励或惩罚。选择的速度值指示激活ESP前所需的速度下降。奖励越高下降越少。
(2)可调参数
1)名称:驾驶员奖励。
范围:启用。
说明:此参数在ECM中打开此特性。
2)名称:速度奖励模式。
范围:RSG模式、巡航控制模式或两者兼备。
说明:当驾驶员在燃油经济性和怠速时间都达到了确定的标准时,可以受到RSG、巡航控制或两者同时提供的速度奖励。选择最符合驾驶员要求的速度奖励模式。
3)名称:燃油经济标准—期望。
范围:0~50mile/gal。
说明:确定驾驶员可以合理地期望达到的每加仑燃油行驶里程数为单位的燃油经济性标准。期望的燃油经济性标准可以设定为0~50mile/gal中的任何值。
4)名称:燃油经济性标准—良好。
范围:0~50mile/gal。
说明:确定等于或大于已经确定的燃油经济性标准的每加仑燃油行驶里程数为单位的燃油经济性标准。良好的燃油经济性标准可以设定为0~50mile/gal中的任何值,但必须等于或大于期望的燃油经济性。
5)名称:燃油经济性标准—最佳。
范围:0~50mile/gal。
说明:确定等于或大于期望和良好的燃油经济性标准的每加仑燃油行驶里程数为单位的最佳燃油经济性标准,此标准可设定为0~50mile/gal中的任何值,但必须等于或大于期望和良好标准值。
6)名称:怠速标准—期望。
范围:0%~100%。
说明:确定以驾驶员可以合理地期望达到的总行驶时间百分比为单位的发动机怠速运行时间标准。期望标准可设定为0%~100%之间的任何值。
7)名称:怠速标准—良好。
范围:0%~100%。
说明:确定等于或好于已经确定的期望值,以总行驶时间百分比为单位的发动机怠速运行时间的时间标准。良好标准可以设定为0%~100%之间的任何值,但必须等于或低于期望怠速标准。
8)名称。怠速标准—最佳。
范围:0%~100%。
说明:确定等于或好于期望和良好的怠速标准,以总行驶时间百分比为单位的发动机怠速运行时的最佳时间标准。最佳标准可设定为0%~100%之间的任何值,但必须等于或低于期望标准。
9)名称:速度奖励—期望。
范围:-20~20mile/h。
说明:根据大于调速最大速度的每小时里程数选择额外的速度值,一旦达到期望的公司燃油经济性和怠速标准,驾驶员就可以选择。可编程期望的速度奖励范围是从低于最大车速20mile/h到高于最大车速20mile/h。(https://www.xing528.com)
10)名称:速度奖励—良好。
范围:-20~20mile/h。
说明:根据调速最大速度而且也大于期望的速度奖励的每小时里程数选择额外的速度值,一旦达到良好的燃油经济性和怠速标准,驾驶员就可以选择。可编程良好速度奖励范围是从低于调速最大车速20mile/h到高于调速最大车速20mile/h。
11)名称:速度奖励—最佳。
范围:-20~20mile/h。
说明:根据大于最大车速而且大于期望和良好的速度奖励的每小时里程数选择额外的速度值,一旦达到最佳燃油经济和怠速标准,驾驶员就可以选择。可编程最佳速度奖励范围是从低于最大车速20mile/h到高于最大车速20mile/h。
12)名称:速度奖励—惩罚。
范围:-20~20mile/h。
说明:根据小于最大车速的每小时里程数选择惩罚速度值,如果没有达到期望的燃油经济性和怠速标准,驾驶员就会受到限制。可编程惩罚速度范围从低于最大车速20mile/h到高于最大车速20mile/h。
13)名称:ESP奖励—期望。
范围:0.2~20mile/h。
说明:根据从最大车速减小的每小时里程数选择一个速度值,一旦达到期望的公司燃油经济性和怠速标准,将激活ESP向高转矩转换。可编程的车速下降范围从0.2~20mile/h。
14)名称:ESP奖励—良好。
范围:0.2~20mile/h。
说明:根据最大车速减小的每小时里程数选择一个速度值,一旦达到良好的公司燃油经济性和怠速标准,将激活ESP向高转矩转换。针对良好ESP奖励级别选择的速度值小于期望的ESP奖励级别的速度值。这会导致加快向高转矩输出转换。可编程的车速下降范围从0.2~20mile/h。
15)名称:ESP奖励—最佳。
范围:0.2~20mile/h。
说明:根据最大车速减小的每小时里程数选择一个速度值,一旦达到最佳公司燃油经济性和怠速标准,将激活ESP向高转矩转换。针对最佳ESP奖励级别选择的速度值必须小于良好和期望的ESP奖励级别的速度值。这会导致加快向高转矩输出转换。可编程的车速下降范围从0.2~20mile/h。
16)名称:ESP奖励—惩罚。
范围:0.2~20mile/h。
说明:根据最大车速减小的每小时里程数选择一个速度值,如果没有达到期望的燃油经济性和怠速标准,将延迟ESP向高转矩转换。对惩罚级别选择的速度值必须等于或大于期望的奖励级别速度值。可编程的车速下降范围从0.2~20mile/h。
(3)驾驶员启用/停用驾驶员可以激活“驾驶员奖励”特性,但只能用康明斯服务软件激活。
(4)与其他特性和参数的相互作用驾驶员奖励可以和车辆速度、巡航控制和ESP产生相互作用。与车辆速度和巡航控制一起使用时,驾驶员奖励能在巡航控制中的最高档和最大转速时产生最大车速,可以超过由客户确定的奖励级别。与ESP一起使用时,驾驶员奖励能缩短向高转矩输出的转换时间。
一旦达到一个奖励水平,奖励会保持有效,直到达到一个新的奖励水平或复位行驶信息。
(5)特别说明行车信息复位时,驾驶员奖励记录也将自动复位。要允许系统初始化,必须确保行驶信息在完成一次行程前复位,然后至少行驶81km。在行驶第一个81km后,系统将开始另一个行驶间隔,在此期间会监测和分析行驶数据。行驶信息的累积和平均将继续下去,直到当行驶信息记录复位时驾驶员奖励记录复位。使用服务软件可以复位这些记录。驾驶员奖励定期监测和分析驾驶员的行驶燃油经济性和行驶怠速时间,在满足选择的公司临界标准后,提供相应的速度奖励或惩罚。当驾驶员效率数据累积超过一个行驶区间时,程序将信息平均并更新驾驶员奖励级别。行驶信息的累积和平均会持续,直到复位驾驶员奖励记录。
(6)缺点车速增加是一种对节省燃油的驾驶习惯的奖励。启用该特性,最大车速和巡航控制车速毫无疑问会超过这些参数的设定值。
驾驶员奖励是考察与燃油经济性和怠速时间百分比有关的驾驶员的表现的。这些参数作为平均燃油经济性、怠速时间和行驶时间,累计在行驶信息特性中,直到它们复位。如果打开驾驶员奖励特性,但没有被客户使用,而又没有定期复位,上面提到的行驶参数将累计成大型的行驶信息历史记录,这些记录会使燃油经济性变化,而怠速时间百分比不变。最新的驾驶员的表现,无论好坏,都对燃油经济性或怠速时间百分比影响很小,并且会使在不同的奖励级别之间上移和下调非常困难。
(7)辅助数据燃油经济性或怠速时间百分比不同组合奖励标准见表2-6。
表2-6 燃油经济性或怠速时间百分比不同组合奖励标准
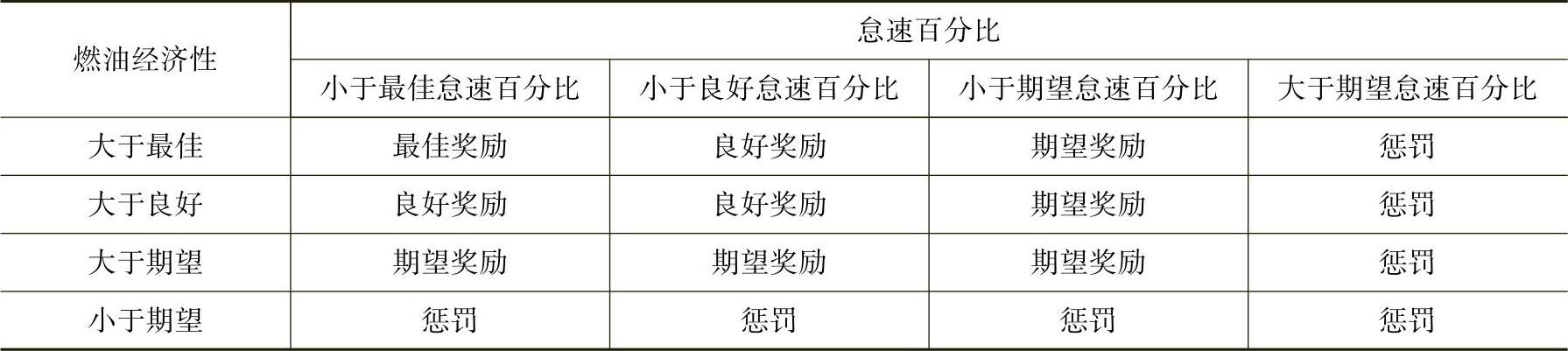
这些小于或大于的数值是基于客户设定的目标。驾驶员奖励定期监测和分析驾驶员的行驶燃油经济性和怠速时间,在满足选择的公司临界标准后,提供相应的速度奖励或惩罚。当驾驶员效率数据积累超过一个行驶区间时,程序将信息平均并更新驾驶员奖励级别。在可以选择相应的奖励前,驾驶员必须同时满足特定水平的燃油经济性和怠速时间的表现标准。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。