



1.控制器的选择及外围电路
壁面清洁智能机器人的控制器采用80C52单片机,如图11-23所示。该类单片机共有1个串口中断,3个定时器中断,2个外部中断,4KB的程序存储容量,最小系统采用的是11.0592M晶振,性能速度等均能满足要求,且价格合理。

图11-23 80C52实物及管脚图
2.电动机驱动方式及电路设计
电动机的驱动采用驱动芯片驱动和继电器驱动相结合的方式。
1)驱动芯片驱动:驱动芯片采用L298N,如图11-24所示。一片L298N可同时驱动转向电动机与升降电动机。L298N的驱动电流最大能达2.5A,而转向电动机与升降电动机的额定电流均为0.7A,因此该芯片完全可以完成驱动任务。L298N的电路图如图11-25所示。
2)继电器驱动:由于前进电动机需要的驱动功率较大,小型驱动难以解决,又考虑到该电动机的控制方式较为简单,故采用继电器驱动。采用的是PNP型三极管对单片机引脚输出的电流进行放大,从而实现单片机直接控制继电器的工作。三极管放大电路如图11-26所示。

图11-24 L298N实物图

图11-25 L298N的电路图
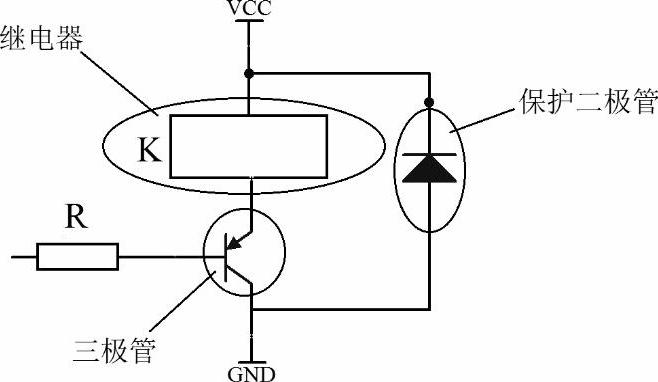
图11-26 三极管放大电路
3.无线通信模块
壁面清洁智能机器人采用UTC1212集成无线通信模块,此模块的功能可以认为是无线串口,开发方便,操作简单。此模块由发射模块和接收模块组成。发射模块只需要插在计算机USB口即可,其内部集成了串口-USB转换电路。接收模块只需要连接7条线,对应关系为GUD-GND,VCC-VCC,TXD-RXD,RXD-TXD,SETA-GND,SETB-GND,AUX-GND,电路简单易操作。图11-27为发射模块实物图,图11-28为接收模块实物图。

图11-27 发射模块实物图
图11-28 接收模块实物图(https://www.xing528.com)
4.上位机的设计
采用PC机作为上位机对壁面清洁智能机器人进行远距离监控。上位机通过无线串口控制机器人的行走,具体操作如下:系统通电进入初始化程序,机器人会以站立姿势等待上位机发送行走指令,这时上位机可以选择发送行走指令,通过电脑键盘上的上、下、左、右键可控制机器人前进、停止、左转和右转。图11-29为上位机界面。
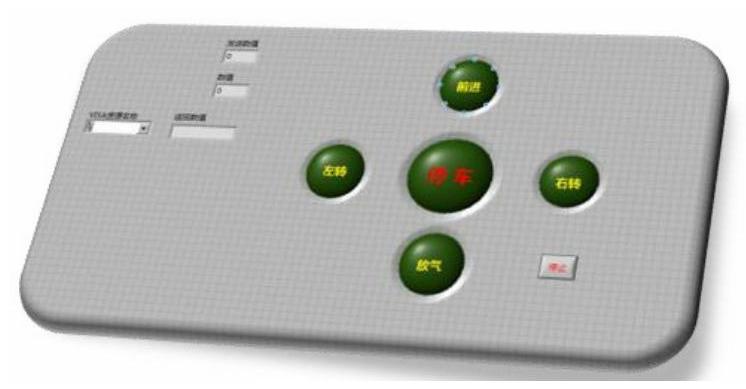
图11-29 上位机界面
上位机程序编写过程运用了VISA资源、键盘检测和其他控件,图11-30为上位机程序界面。

图11-30 上位机程序界面
图11-31为整个控制系统的示意图。壁面清洁智能机器人的控制对象主要包括:低压电源供给、巡回路径规划、行进速度控制、监控测障处理、转向电动机控制及信号识别处理等,以目前的功能要求对于信息的需求量和处理量不是很大。
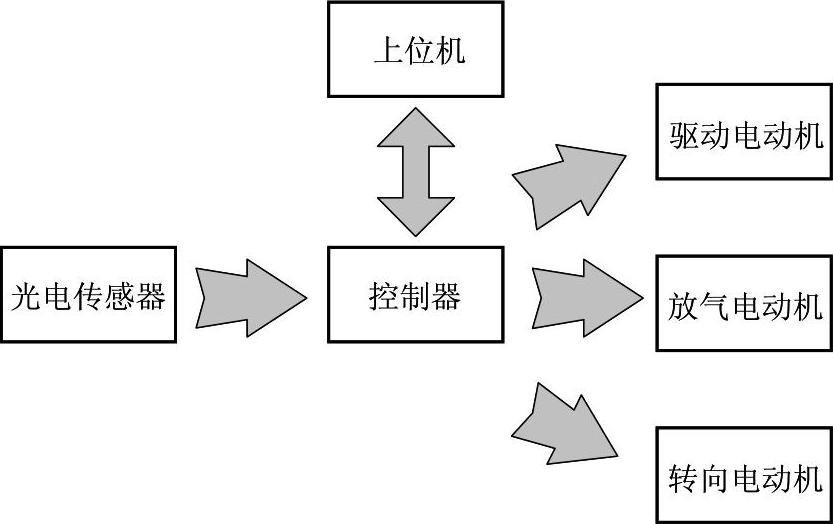
图11-31 壁面清洁智能机器人控制系统示意图
壁面清洁智能机器人的整个工作过程可描述如下:
1)开启电源,启动机身的测障系统;起动气泵马达使气泵开始工作,供履带吸盘吸气的真空发生器(真空泵)打开,连接中央吸盘的气管电磁阀关闭;同时人为将机器人按压于幕墙上。
2)起动清洁系统滚刷驱动电动机,滚刷开始旋转工作,同时启动喷水装置。
3)起动主驱动电动机,履带主动轮转动,机器人开始正常行进,吸气系统同步工作。
4)在正常工作与行进过程中,当测障(可以考虑遥控)系统接受并判断需要转向时,履带主驱动电动机停止运行,清洁系统的滚刷和喷水装置停止工作,供履带吸盘吸气的吸气系统停止工作。
5)中央吸盘的气管电磁阀打开,供转向吸盘吸气的真空发生装置处于工作状态;机身升降电动机起动,驱动中央吸盘垂直幕墙向靠近幕墙的方向运动,中央吸盘完成吸附过程后,机身升降电动机停止运行(运动时间控制参数根据实际情况确定);起动履带吸盘放气杠杆舵机,使两侧履带吸盘同时放气,放气完成之后履带放气杠杆舵机复位。
6)机身转向电动机起动,机身开始转向,转向完成之后转向电动机停止,机身升降电动机起动,驱动机身向靠近幕墙的方向运动,下压履带吸盘,当履带吸盘完成被动吸附之后机身升降电动机停止;起动中央吸盘杠杆舵机给中央吸盘放气,放气完成之后此杠杆复位;转向电动机复位以准备进行下一次转向。
7)再次起动清洁系统滚刷驱动电动机,滚刷开始旋转工作,启动喷水装置,开始喷水。起动主驱动电动机,履带主动轮运行,机器人开始行进。如此不断循环,直至工作完成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。