



1.吸盘吸附幕墙的力学参数
根据吸盘选用样本,计算吸盘的吸附力
F=SP/μ (11-14)
垂直起吊时理论起吊力(吸附力):真空吸盘吸附力与吸附物以及吸盘吸附面的摩擦力即为维持物体的力(吸附力)
F=0.1μSP (11-15)
式中 F——理论起吊力(N);
μ——摩擦系数;
S——吸盘的吸附面积(cm2);
P——真空压力(kPa)。
2.机器人安全性论证
(1)摩擦力的校核 根据式(11-15),取摩擦系数μ=0.3,负压P=-50kPa,可以得到每个吸盘对壁面的吸附力的大小
F=0.3×0.1×π×(4/2)2×50N=18.84N (11-16)
正常运行时,机器人吸附在壁面上的吸盘共有10个,则吸盘能提供的吸附力总大小为F′=188.4N。
机器人的自重为
G=7.5×9.8=73.5N<F′ (11-17)
因此摩擦力足够。
(2)翻转力矩的校核 由前面分析可知,要使机器人在运行时不发生翻转,只需满足式(11-8)即可,现在
5Vp/d=5×18.84×0.05/0.06N=78.375N (11-18)
因此G<5Vp/d满足,机器人在运行时不会发生翻转。
(3)其他强度参数校核 由式(11-13)可得主动轮轮齿底部受到的切应力为(https://www.xing528.com)

电动机输出的扭转力矩为
T=9549×P/n=(9549×10×10-3/6)N·m=15.915N·m (11-20)
主动轮轮轴受到的最大切应力为

取安全系数k=2,则τmax/k=46.5MPa。
(4)仿真软件模拟校核 借助Solidworks等相关软件,可以很好地模拟相关零件的受力情况,从而进行模型优化。壁面清洁智能机器人的底盘模型如图11-18所示。图11-19和图11-20分别为优化前与优化后底盘模型的受力与变形图。
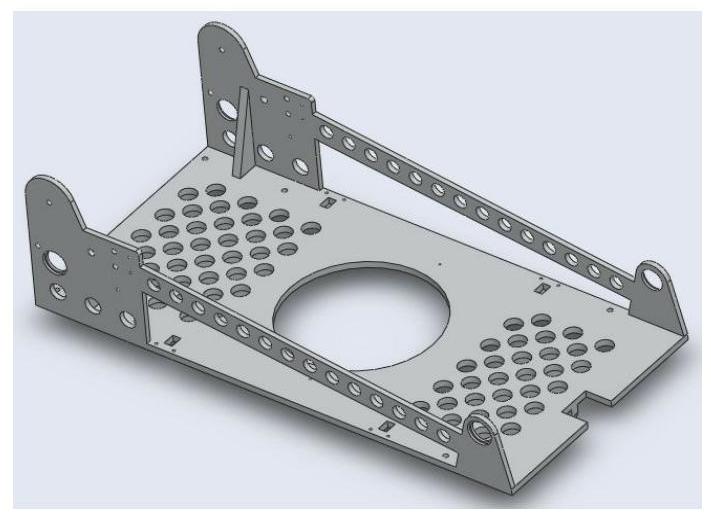
图11-18 壁面清洁智能机器人的底盘模型
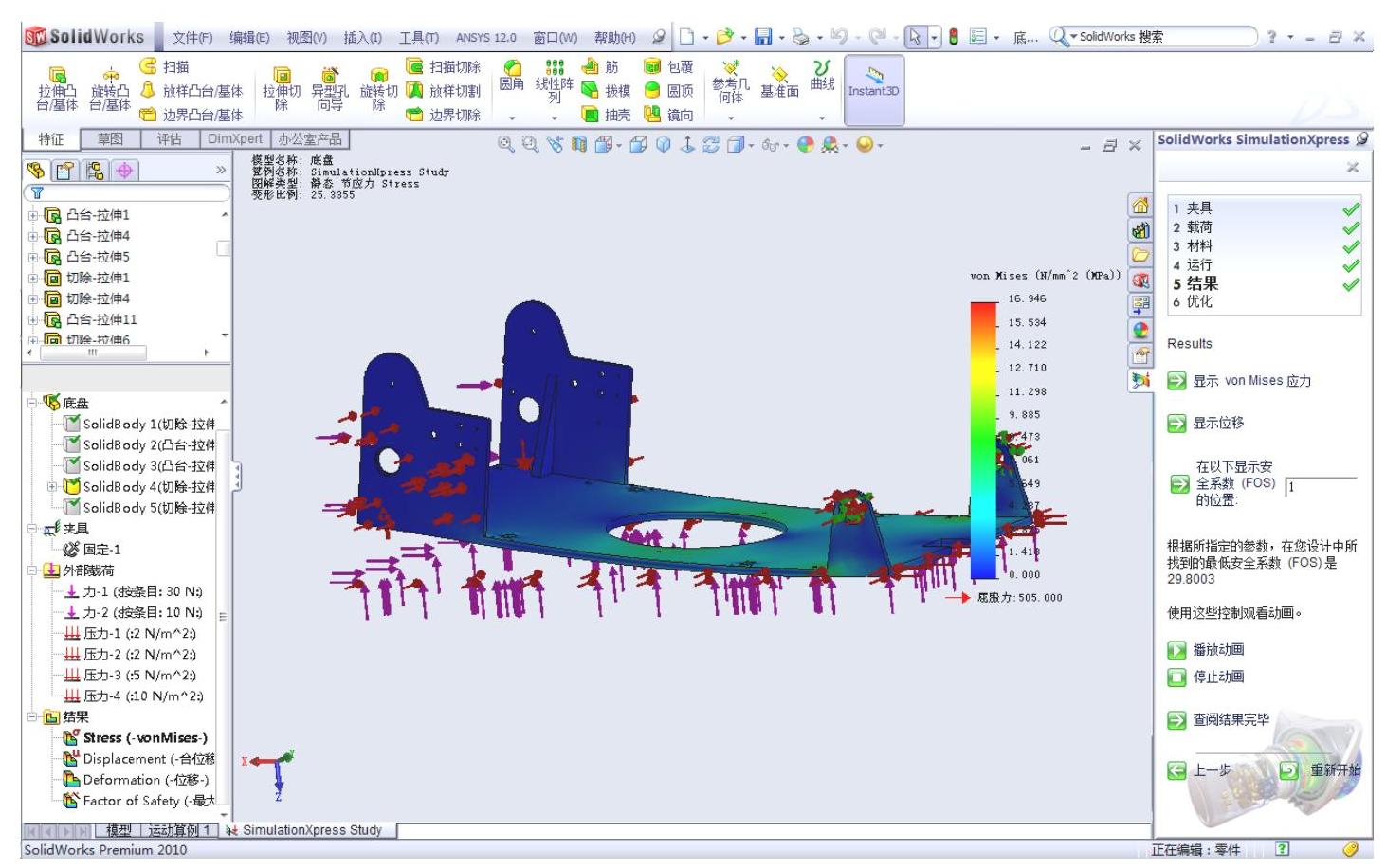
图11-19 优化前底盘原始模型受力与变形分析
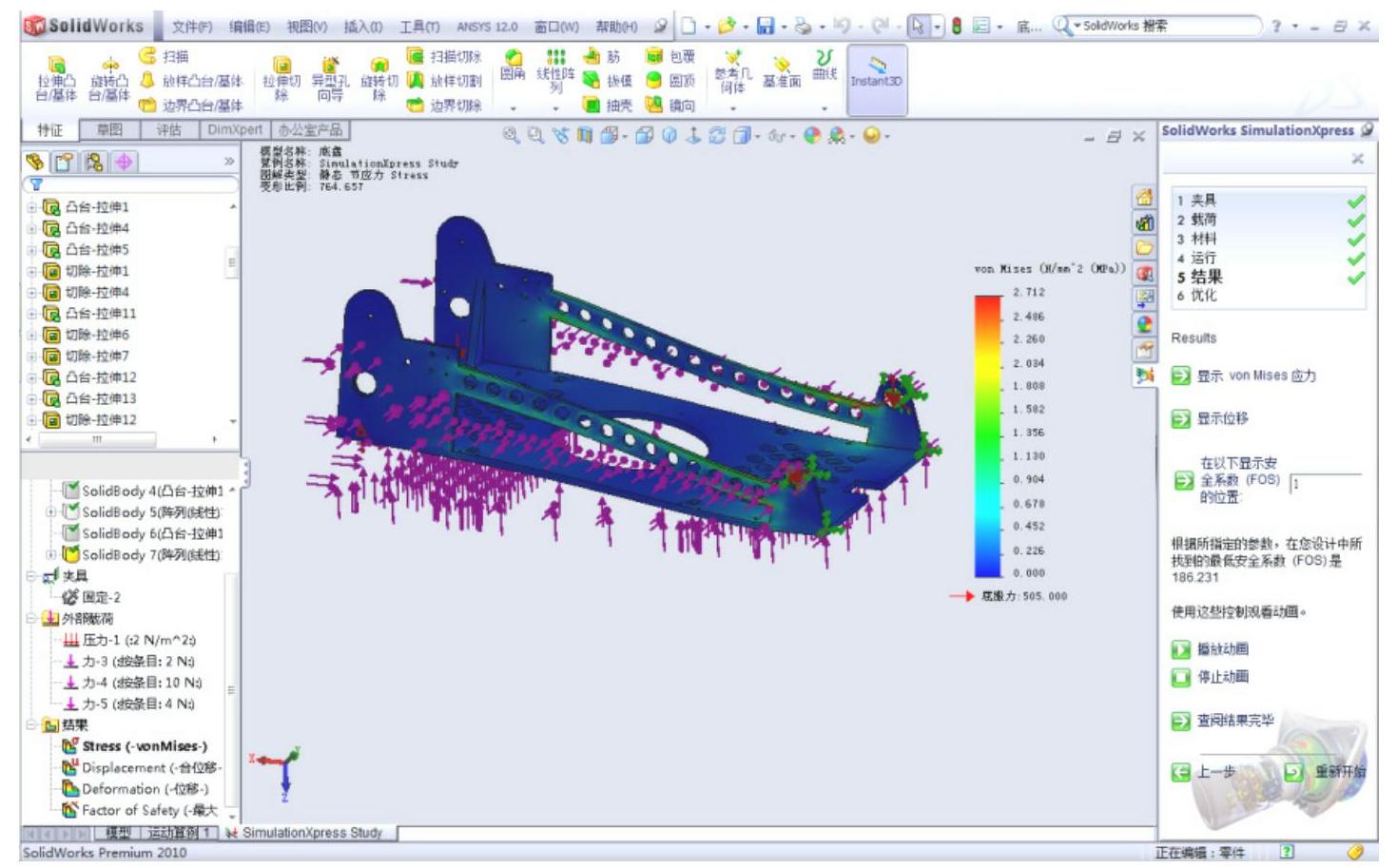
图11-20 优化后底盘模型受力与变形分析
完成相关的力学分析与安全性论证之后,所搭建的壁面清洁智能机器人实物样机如图11-21所示。图11-22为样机在各种壁面上的吸附情况。
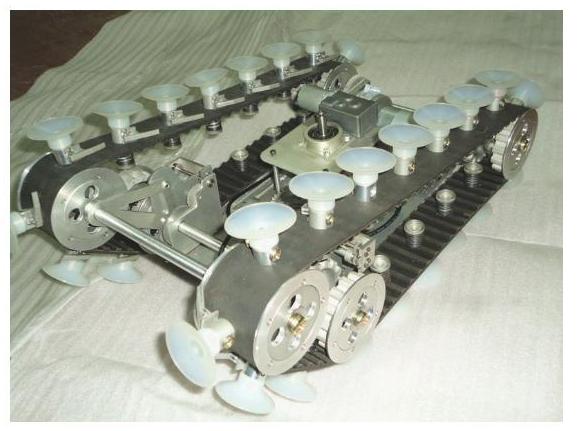
图11-21 壁面清洁智能机器人实物样机

图11-22 壁面清洁智能机器人在各种壁面上的吸附情况
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。