



玻璃幕墙凭借其清新的特点,并且具有防雨、防晒、防噪声等优点,而且可以经过特殊的加工过程得到各种各样的形式,因此近年来得到了建筑师的青睐。然而,玻璃壁面的清洁工作也成为家庭生活或公共场所的一大难题。室外玻璃窗面的污染主要来自于空气中的粉尘、灰尘以及雨水沉积的污渍等,长期的窗面污染使玻璃幕墙的美观度越来越低,更重要的是透明度的削弱使玻璃幕墙的功用大幅较小。
很多大中城市都有明确规定,这种高层建筑需要定期进行清理。然而由于目前并没有能够很好适应现状的壁面清洗机器人,以至于所有的清洗几乎都是由人工采用吊缆的方式手工进行的,如图11-1所示。面对这样的高楼大厦,人工清洗不仅在效率上得不到很好的保证,而且高空吊缆很容易造成人员伤亡事故。
图11-1 传统壁面清洁模式
以此为背景,研究人员提出了多种有关壁面清洗机器人的方案,但仍存在着一定的局限性。如磁力吸盘爬壁机器人,它只能用于导磁金属壁面,而对普通玻璃墙壁却无法适用,许多大型悬挂清洗机器人要求有楼顶悬挂机构,吊缆式的高空玻璃清洁机器人虽然可以代替人工,减少伤亡事故的发生率,提高清洁效率,但是这类清洁机器人无法摆脱吊缆的控制,不具有智能识别和清洗的功能,为其普及应用带来了困难。(https://www.xing528.com)
为使壁面清洁机器人能够具有更好的适应能力和清洁能力,项目组设计和开发了一种履带吸盘式壁面清洁智能机器人。此机器人可以摆脱吊缆的束缚,即采用无缆式控制,而且具有一定的越障和自动识别功能,能在低功耗的情况下,完成需要的工作量。另外,相比于四足式爬壁机器人,如图11-2所示,具有更好的工作平稳性和安全性。该作品的研究对于提高壁面清洗效率、减少人员伤亡、扩大清洗范围、提高壁面清洁机器人的智能化水平具有重要意义。此外,履带吸盘式壁面吸附平台还可推广应用于消防探测、油罐检测、道路除冰及南极科考等工作。
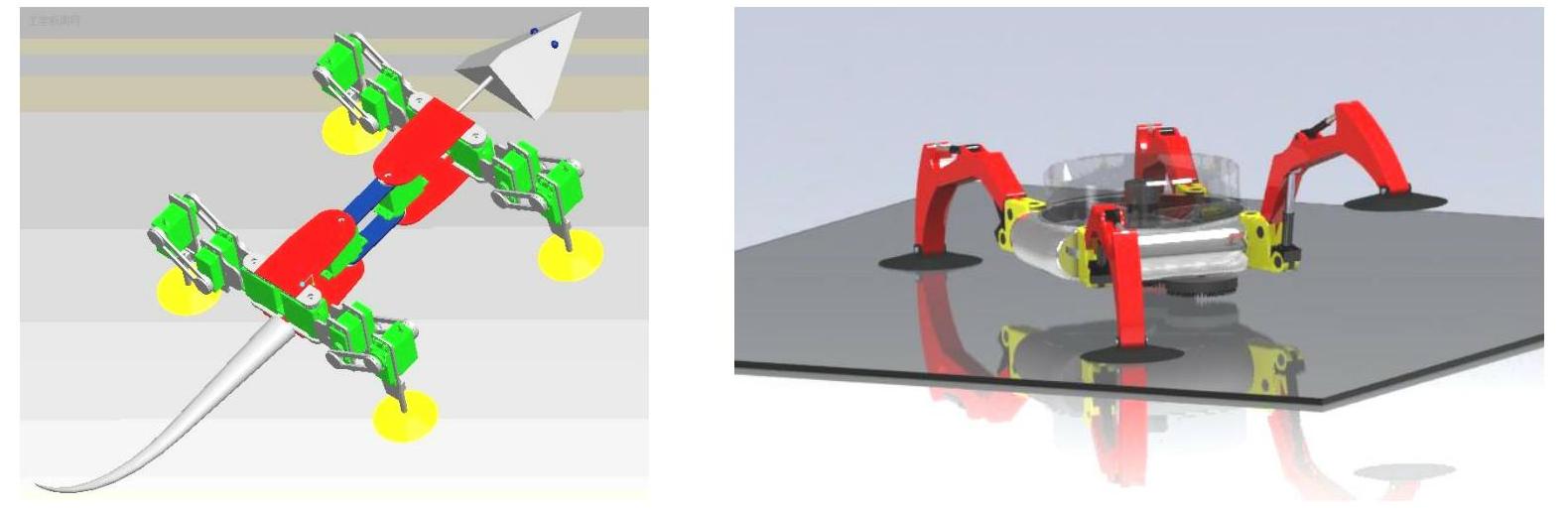
图11-2 四足爬壁机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。