



1.储物单元取放装置设计
(1)设计思路 将存放于所设计储物柜中的储物盒进行规定位置变换,因所设计的储物柜为双层结构,故所需运动可简化为层间提升运动和将储物盒取出所在隔层的抽拉运动,之后配合链式水平运动辅助,即可实现在储物柜中任意位置储物盒的存放与取用。
(2)设计方案 储物柜分为两层,层间距为200mm,储物盒尺寸为长340mm、宽240mm、高140mm,壁厚为2mm,最大设计载荷为15kg。升降结构的主要功能是对储物盒的升降平台进行提升,便于物品存取,最大提升距离约为300mm。
1)整体结构设计。整体采用框架结构,以3根光杠作为支撑连接各个平台的主要结构,各层平台采用4mm厚铝板进行加固,并对各功能区进行分层设计。图10-6是输送平台整体结构示意图。
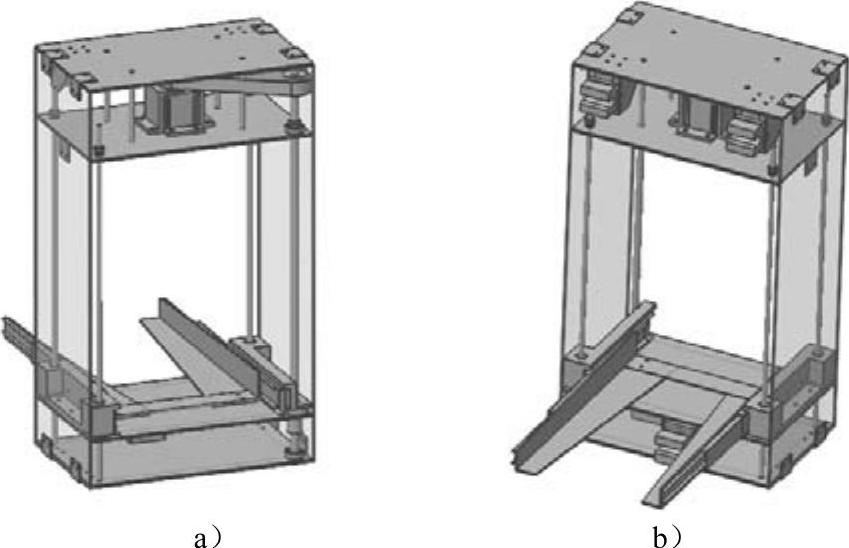
图10-6 输送平台整体结构示意图
a)输送平台背立面图 b)输送平台正立面图
2)输送结构设计。输送结构主体分为2个区域:下侧区域为储物盒升降移动空间,该空间主要对储物升降平台的移动位移进行限制。上侧部分为丝杠驱动部分,步进电动机通过同步带轮将动力传递给丝杠。步进电动机通过4颗螺钉固定在平台上,保证其定位。步进电动机与同步带轮之间通过顶丝进行轴向固定,并提供一定的周向位移限制。丝杠与同步带轮之间通过顶丝相连接,接触面加工一平面,使得顶丝与丝杠之间的周向固定更加牢固。丝杠的轴向固定通过丝杠两端的螺纹来实现。
滚珠丝杠的选择:丝杠主要承受轴向力,提升平台所受重力均为丝杠所承受,另外还需要承受少量径向力。为节约成本,并考虑市场的供货情况,最终选用直径为12mm的滚珠丝杠,丝杠长度为500mm,额定承受载荷为20kg。
3)储物盒取放平台设计。图10-7为储物盒取放平台。取放平台托板采用4mm厚铝板,重量轻,便于加工,并且易于拆卸。平台托板上方固定有导向滑轨支撑架,可以双向滑动带动托板与其上的储物盒进行平移运动,使得储物盒进入储物柜所在支架外侧移动空间,进行储物盒所在空间位置的变化运动。
储物盒存取延伸臂,由两条L型铝材铣削成型,如图10-8所示。延伸臂通过两条双向滚动滑轨进行定位,并且大大减小延伸臂与托板之间所产生的摩擦力,提高整套系统的效率。两套延伸臂之间通过铝材进行连接,保证两侧延伸臂之间的同步。为加强两延伸臂的强度,分别在两侧用延伸臂固定支架进行固定,延伸臂固定支架如图10-9所示。
整个储物盒取放平台需要实现整体平稳的运动,而各层平台通过3根圆柱滑轨支撑实现各个平台的稳定。普通的滑动接触在现有的条件下无法取得预期的目标,且滑动接触的润滑在家庭条件下不容易进行维护,润滑不足会导致平移不够流畅,因此采用直线轴承进行连接。直线轴承是一种以低成本生产的直线运动系统,用于无限行程与圆柱轴配合使用,钢球以极小的摩擦阻力旋转,从而能获得高精度的平稳运动。由于平台使用三根偏置圆柱支撑,会产生一定的弯曲应力,因此选用加长型方法兰的直线轴承LM8LUU。
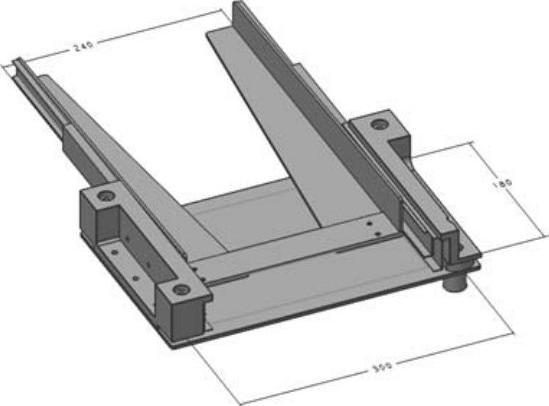
图10-7 储物盒取放平台
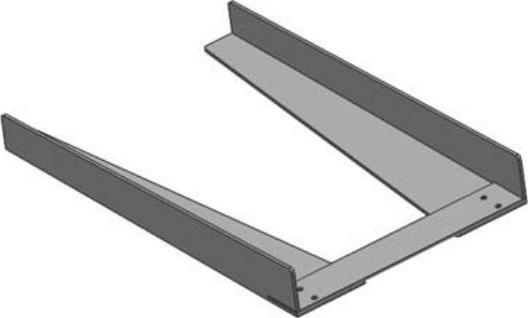
图10-8 延伸臂
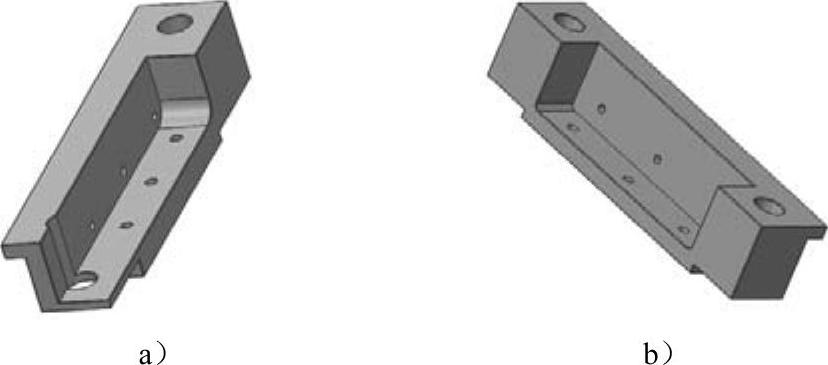
图10-9 延伸臂固定支架
a)延伸臂左固定支架 b)延伸臂右固定支架
由于加工误差,圆柱滑轨的平行度在运行时并不十分准确,使得各高度的圆柱导轨的中心矩会产生变化,使得平台运行时产生挤压变形,增加摩擦力,影响平台的流畅运行,因此在设计时直线轴承在竖直方向上进行过盈配合,但在水平方向上留有一定间隙,使得整体系统中不会对圆柱导轨产生较大的内部零件之间的应力。中心调整装置如图10-10所示。
(3)同步带传动机构设计
1)设计功率。在家庭环境下,传动机构的工作条件良好且不会大功率连续工作,所以选择工况系数KA=1。工作时,步进电动机的最大输出功率为9.2W,因此设计功率约为Pd=KAP=9.2W。
2)小带轮转速计算。将托板的上升速度设计为50mm/s,则小带轮转速为托板上升速度除以丝杠导程(4mm),求得转速为12.5r/s(750r/min)。
3)同步带选型。根据圆弧齿同步带(见图10-11)的选型原则,选择3M圆弧齿同步带,小带轮齿数为30。
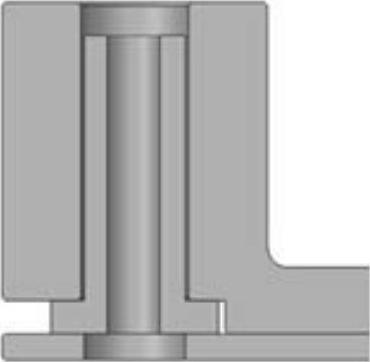
图10-10 中心调整装置
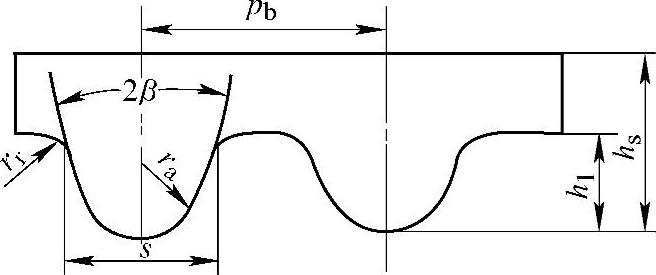
图10-11 圆弧齿同步带
圆弧齿同步带带齿和带宽尺寸(依据JB/T 7512.1—1994)
带型:3M
节距pb:3
齿高ht:1.22
齿顶圆角半径ra:0.87
齿根圆角半径rr:0.24~0.30
齿根厚s:1.78
齿形角2β:14°
带高hs:2.40
带宽:6,9,15
4)小带轮节圆直径

5)大带轮齿数

6)大带轮节圆直径

7)带速

8)初定轴间距

由式(10-5)得:53.501mm≤a0≤152.86mm,根据设计意图,选定a0=152.8mm。
9)带长

根据“圆弧齿同步带长度系列”选取标准,节线长Lp=459mm
10)带齿数

11)实际中心矩

12)安装量和调整量的计算
通过JB/T 7512.2—1994查表得,安装量I=1.02+6=7.02(双边挡圈),调整量S=0.76。因此
amin=a-I=162.36mm (10-10)
amax=a+S=170.14mm (10-11)
13)啮合齿数

14)啮合齿数系数
zm=14>6→啮合齿数系数Kz=1
15)基本额定功率。查表“基本带轮功率(JB/T 7512.3—1994)”得,P0=0.068kW。
16)带宽

计算得:bs0=6mm,bs=9.42mm,bf≥bs,因此选择bf=15mm的同步带。
(4)动力装置选择 因整套装置主要应用于家庭环境,故动力系统的体积不宜过大。另外,因设计载荷相对较小,因此选用步进电动机进行驱动。为使系统较为安全,并降低运行时的噪声,采用低电压直流输入。升降结构传动采用丝杠传动,传动效率高,灵敏度高并且定位准确,满足所需的结构要求。滚珠丝杠的导程为4mm,驱动扭矩为

式中 Fa——轴向负载,N;
I——丝杠导程,m;
n1——丝杠正效率。
升降平台步进电动机的选择:根据厂家提供的电动机参数,选择57BYGH301混合式(永磁感应子式)步进电动机,具体参数见表10-2。
表10-2 57BYGH301混合式步进电动机参数

根据步进电动机的频矩特性,该步进电动机在较低转速条件下的转矩较大,整体性能满足设计要求。
取放平台步进电动机的选择:15kg重物,摩擦系数约为0.05,则所受摩擦力约为7.5N,由于安装误差,实际摩擦力最大为10N,所选用同步带轮直径为50mm,则所产生的转矩约为7.5N×0.05m=0.37N·m。根据此转矩的大小,选取的电动机为42BYGH混合式步进电动机,其基本参数见表10-3。
1)电动机型号:42BYGH403。
2)应用场合:监控设备、医疗仪器、工业自动化设备。
3)步进角:1.8°。
4)温升:65K。
5)绝缘电阻:DC·500V100MΩ(最小)。
6)工作温度:-10~55℃。
表10-3 42BYGH403混合式步进电动机的基本参数

2.竖直升降装置设计
(1)设计方案 悬挂货架左上方用螺丝固定平板,在平板上方固定电动机,同步带轮Ⅰ、同步带轮Ⅱ分别与同步带相啮合构成同步带机构,同步带轮通过键配合安装在传动轴上,传动轴则通过固定轴承安装在平板上,其上还安装有卷线筒和齿轮,钢丝绳的一端固定在传动轴的卷线筒上,另一端通过定滑轮固定在用于容纳储物单元的托盘上,电动机转动通过同步带机构降速传到传动轴上,使卷线筒转动,进而带动托盘升降。托盘背部安装着的两个滑块,可沿焊接在悬挂货架后方的两根直线导轨滑动,以此保证储物单元在竖直运动中的平稳性。平板上锁死机构的衔铁在系统断电后将脱离电磁铁的吸附,卡住传动轴上的齿轮,使传动轴终止转动,防止托盘在储物单元及自身的重力下突然滑下伤及用户。(https://www.xing528.com)
(2)动力装置选择 托盘、储物单元及物品的总质量为20kg,产生的外力为F=200N。托盘带动储物单元作匀速升降运动,高度为1.5m,用时5s,因此速度为v=0.3m/s。图10-12为竖直升降装置机构运动简图。
1)电动机类型选择。电动机选用永磁感应子式步进电动机。
2)确定电动机功率。
传动装置总效率:η总=η带×η轴承×η卷线筒=0.96×0.992×0.95=0.89。
电动机所需功率:Pd=Fv/η总=200×0.3/×0.89=67.4(W)。
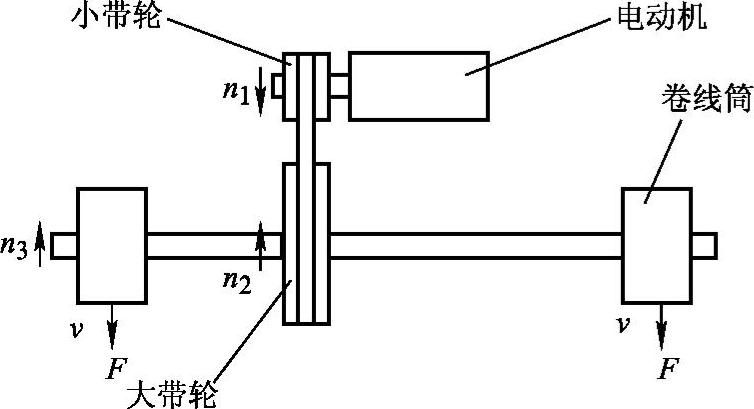
图10-12 竖直升降装置机构运动简图
3)确定电动机转速。设小带轮、大带轮、卷线筒的半径与转速分别为r1、r2、r3和n1、n2、n3,三者之间的关系为

当v=0.3m/s时

n1即为竖直升降装置所用电动机的转速,可通过控制频率来控制电动机转速。
4)确定电动机型号。根据以上选用的电动机类型、所需的额定功率及同步转速,选定永磁感应子式步进电动机,型号为85BYGH203,如图10-13所示。其主要性能参数为:4相制,24V工作电压,4A工作电流,功率为96W,静转矩为5.0N·m,步距角为0.9/1.8º。
电动机驱动器使用两相混合步进电动机驱动器,型号为SH2046M,该驱动器具有噪声低、效率高、电压范围宽、设置灵活、运行平稳、定位准确等优点。
①输入电源接口:采用直流供电,DC:24V,3A。
②电动机接口:85BYGH203步进电动机为二相四线电动机,可直接与驱动器相连。
③输入信号接口:SH2046M型步进电动机驱动器内部的接口电路都采用光耦信号隔离,当信号幅度为5V,不加外接限流电阻。
④相电流设定:SH2046M型细分驱动器采用拨位开关设定相电流及细分数,其中拨位5是半流使能,拨位6是单双脉冲设定。驱动器细分设定后电动机的步距角等于电动机的整步步距角除以细分数。
⑤安装:驱动器采用带散热器的外壳结构。
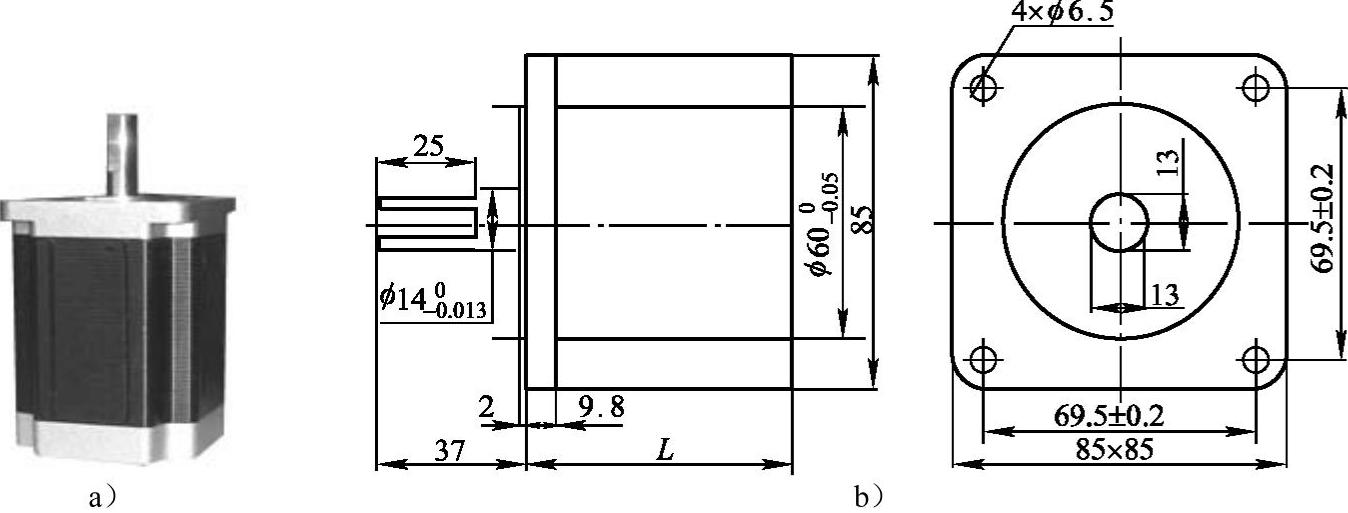
图10-13 85BYGH203电动机
a)电动机实物图 b)电动机结构尺寸图
(3)同步带轮传动机构设计 同步带轮传动机构由一根内周表面设有等间距齿的封闭环形胶带和相应的带轮组成。运动时,带齿与带轮的齿槽相啮合传递运动和动力,是一种啮合传动,因而具有齿轮传动、链传动和平带传动的各种优点。
采用同步带传动具有准确的传动比,无滑差,可获得恒定的速比,传动平稳,能吸振,噪声小,传动比范围大,一般可达1:10。允许的线速度可达50m/s,传递的功率从几瓦到几百瓦,甚至上千瓦,传动效率高,一般可达98%,结构紧凑,无需润滑,无污染,一般使用温度为-20~80ºC,v<50m/s,P<300kW,i<10,对于要求同步的传动也可用于低速传动,因此可在不允许有污染和工作环境较为恶劣的场所下正常工作。表10-4为同步带轮传动机构设计参数。
表10-4 同步带轮传动机构设计参数

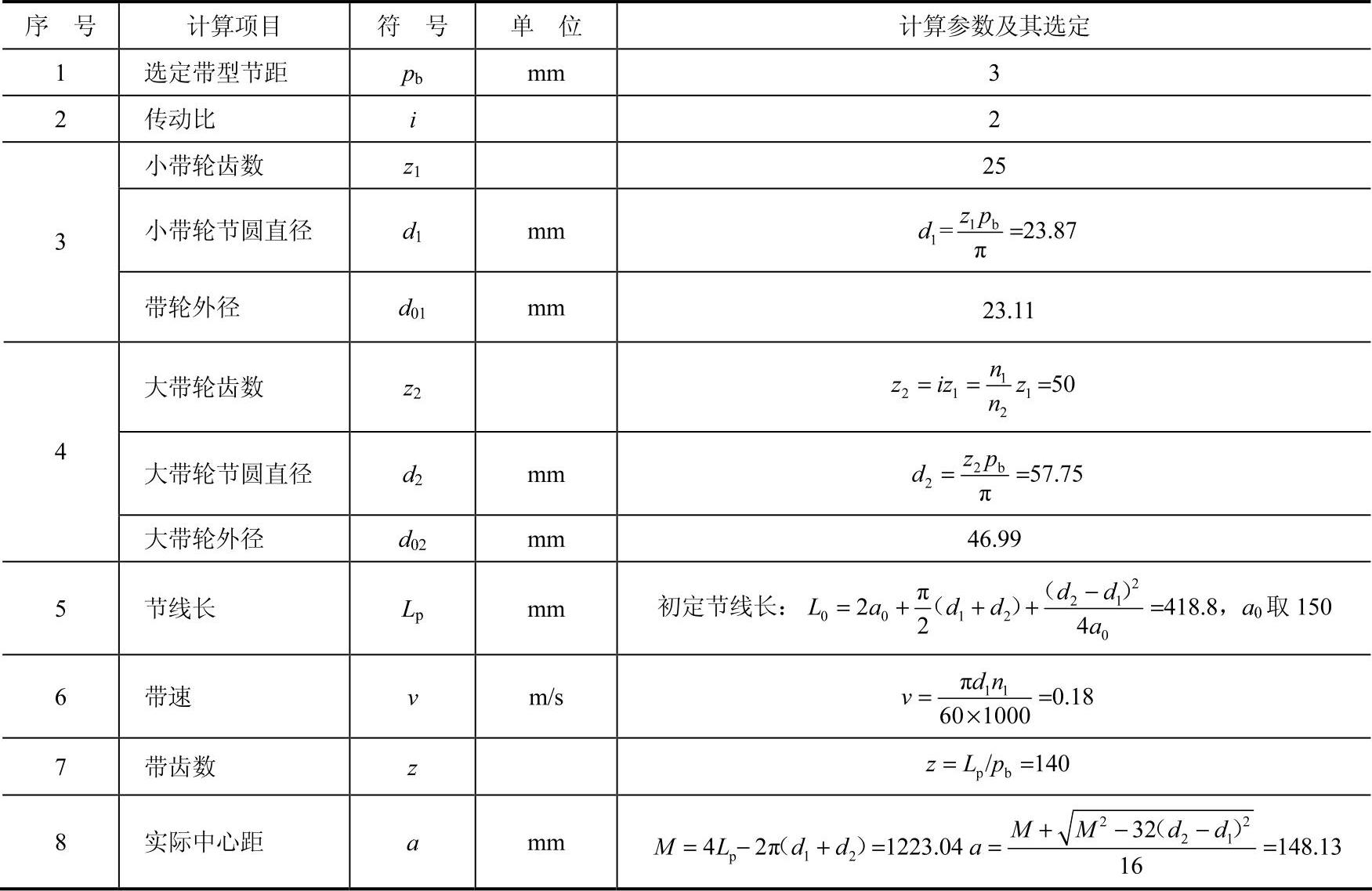
同步带传动机构间的传动比i=z2/z1=2,通过三维建模软件可测得小带轮包角α=134.57°>120°,因此满足设计要求。同步带传动机构的相关设计计算见表10-5。
表10-5 同步带传动机构的相关设计计算
带轮确定后,通过查阅设计手册可确定同步带的相关尺寸,见表10-6。
表10-6 同步带的相关尺寸

(4)传动轴设计及校核 传动轴的结构尺寸如图10-14所示。
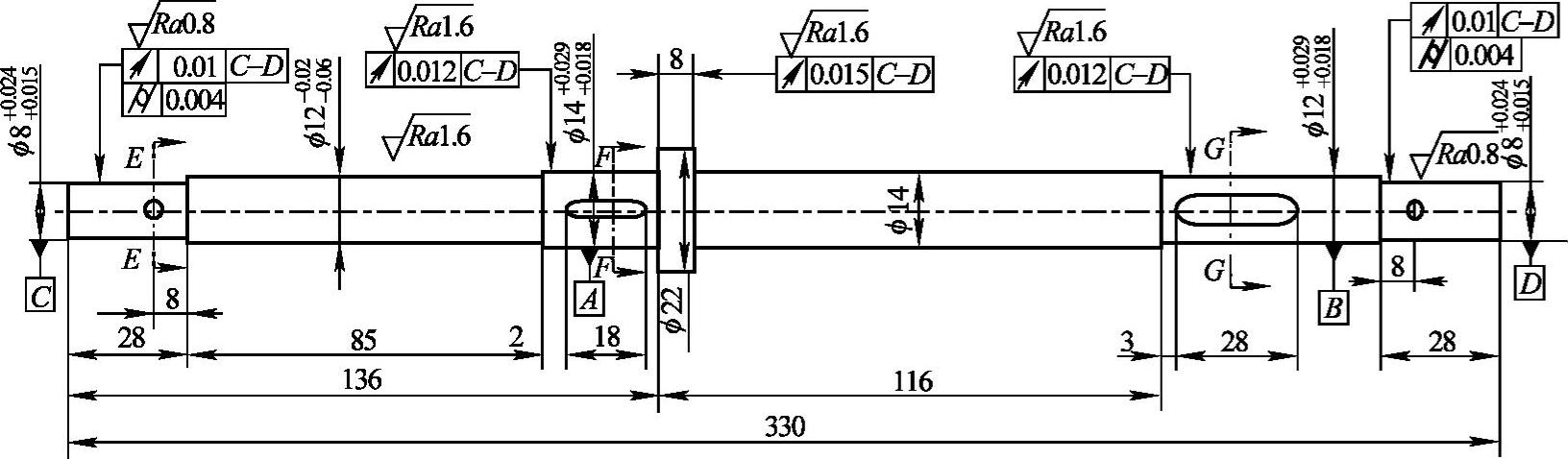
图10-14 传动轴
将传动轴转化成横截面积A=πD2/4=π×82/4=50.3mm2,长度L=330mm的光轴,即按阶梯轴处为最小横截面积进行校核。
按照步进电动机输出最大功率P1=96W计算,传动轴上功率P2=92.16W,则有
转矩:
圆周力:Ft=2T/d=2×7.33/8=1.83N
径向力:Fr=Fttanα=1.83N×tan20°=0.67N
绘制水平面弯矩图,如图10-15a所示。
轴承支反力

截面C左右侧弯矩
MH=MH,C-=MH,C+=FNH1×124.5=221.61N·mm (10-19)
绘制垂直面弯矩图,如图10-15b所示。
轴承支反力:

截面C左右侧弯矩:
MV=MV,C-=MV,C+=FNV1×124.5=603.83N·mm (10-22)
校核传动轴:转矩产生的扭剪应力按脉动循环变化,取a≈0.6
C截面右侧为危险截面,由强度校核公式

因此,用传动轴最小截面进行校核时满足设计强度要求。
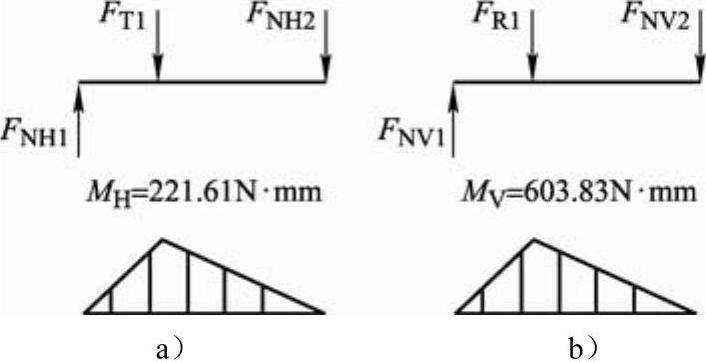
图10-15 弯矩图
a)水平面弯矩图 b)垂直面弯矩图
校核带有固定架的轴承:轴端直径d=8mm,传动轴转速n=120r/min,初选1200型调心球轴承,由于只承受径向力,所以X=1,Y=0,查表得:Cr=5.5kN。
在水平面上的径向载荷

在铅垂面上的径向载荷

可得两轴承处的径向载荷
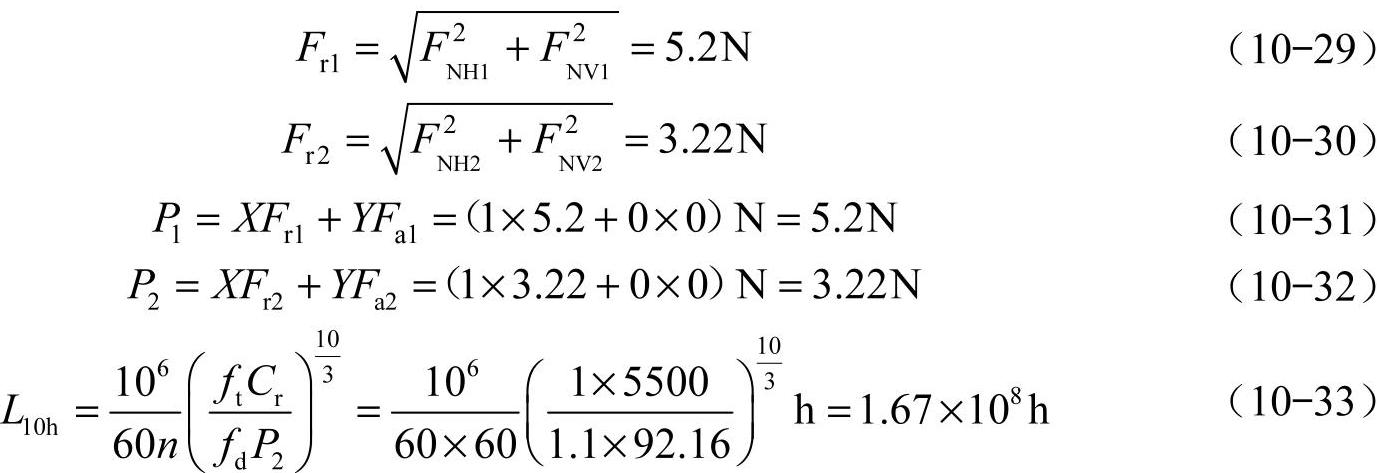
结果显然满足使用要求,故1200型调心球轴承符合寿命要求。
3.水平拖动装置设计
(1)设计方案 水平拖动装置主要由步进电动机和悬挂货架上的若干定滑轮组成,电动机固定在平板上,其转轴上安装有卷线筒,钢丝绳依靠定滑轮的导向作用,可带动储物单元取放装置的滑块作水平运动。
(2)动力装置选择 动力装置选用85BYGH101型步进电动机。
1)转矩校核。储物单元取放装置在开始l1=0.2m内完成加速,用时t1;在最后l1′=0.2m内完成减速,用时t1;中间l2=0.8m为匀速运动,用时t2,整个水平运动要求5s内完成,得以下方程组

解得
储物单元取放装置及载荷的极限重量为Fn=200N,滑块与导轨的摩擦系数取0.3,则水平方向的摩擦阻力为f=µFn=0.3×200N=60N。
设水平方向的拉力为F,由F-f=ma,可得F=65.12N。又卷线半径r=17.5mm,因此,需要的转矩为T=Fr=65.12×0.0175N·m=1.14N·m。
卷线筒卷线的最大线速度即为0.32m/s,所以角速度为

转速为

因为步进电动机85BYGH101步距角为0.9/1.8°,所以400pps(脉冲数/秒)对应转速为1r/s,当转速为2.9r/s时,对应的频率为1.16kpps,查图10-16得此时电动机能提供的转矩为2.1N·m>1.14N·m,因此满足转矩要求。又考虑到在使用中柜子水平方向的长度会更大,因此需要的转矩会比理论计算值稍大一些,故选用此步进电动机,可保证足够的转矩余量。
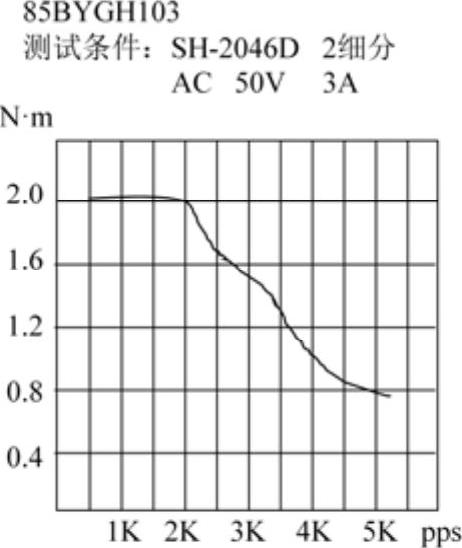
图10-16 85BYGH系列电动机矩频特性图
2)功率校核。储物单元取放装置水平方向运动的最大速度为0.32m/s,受到的最大拉力为F=65.12N,因此,水平运动的最大功率为
P=Fv=65.12×0.32W=20.84W (10-37)
对于85BYGH101步进电动机,当角速度ω=18.29rad/s,对应的频率为1.16kpps,同样查图10-16,可得此时电动机能提供的转矩为2.1N·m,因此它能提供的功率为
P=ωT=18.29×2.1W=38.4W>20.84W (10-38)
因此85BYGH101步进电动机满足实际需要的功率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。