



针对安全性考虑一节中讨论出的可能发生的危险情况,设计出相应的应对策略,提高机器人安全性能。①关节死区:尽管目前电路控制技术已日趋完善,可以从控制层面完成对机械关节“转动死区”的控制。但是由于自身信号传导的缺陷与程序设计的不完善,这种死区控制方法依然不能完全保证其可靠性。因此必须从机械层面,设置限位机构,使得各机械转动副的运动受到可调整的限制。②穿戴器械跌倒:通过常识可以得知,在人体自由运动的状态下,一旦出现站、坐姿失去平衡的情况,可以通过运动肢体、调整支撑重新获得平衡。在实际使用该作品的过程中,使用者的脚部是被捆绑粘扣牢牢固定在机器踏板上的。尽管目前已有一些国家的动力器械公司(如美国的Boston Dynamics)已研制出可以自动保持并恢复平衡的两足行走人形机器人,但是这一技术在本作品进行设计的当前阶段远远不能被掌握。因此无法靠对机械肢体的动作控制来完成对躯体平衡的重新获得。必须通过机械保护装置的手段,尽量避免人体在使用过程中背负着器械坠地的情况发生。③控制系统故障与紧急停机:对系统紧急停机按钮的设定当然是必不可少的。但是由于用户在使用过程中,双手往往紧握手柄,同时脚部的活动也受到捆绑带的限制。所以单纯靠设置紧急停机按钮或踏板来实现停机功能是远远不够的,必须找到其他使用指令的传播途径,不依靠手脚触碰按钮来实现机器人的紧急停机。
1.四肢各驱动单元保护装置
在一号、二号圆柱直齿轮传动副上,分别在齿轮与钣金框架上设置会发生机械干涉的挡片,用来在输出轴的活动范围内制造运动“死区”,与人体各关节的“死区”相对应。在一号、三号圆锥直齿轮传动副上,在大齿数锥齿轮上设置了一挡片,来阻止此处大小锥齿轮的啮合。这个挡片同样像圆柱齿轮输出轴一样,可以在轴的转动中制造“死区”。直齿轮挡片和锥齿轮挡片截图分别如图9-47和图9-48所示。

图9-47 直齿轮挡片截图

图9-48 锥齿轮挡片截图
2.躯干后倾与侧摆保护装置(https://www.xing528.com)
为防止上部躯干出现向后倾倒的情况,通过在8R连杆机构相应的转动副上添加止动螺钉,在此转动副上制造出“死区”,通过机械干涉防止出现上躯干后倾的现象。腰部止动螺钉如图9-49所示。

图9-49 腰部止动螺钉
对于腰部侧倾的保护,通过改变8R连杆下部的外形设计,根据其下部运动规律,在其运动到侧倾极限位置时,依靠两根杆件间的互相干涉来阻止这一运动副的继续运动。图9-50所示为腰部侧摆极限位置。
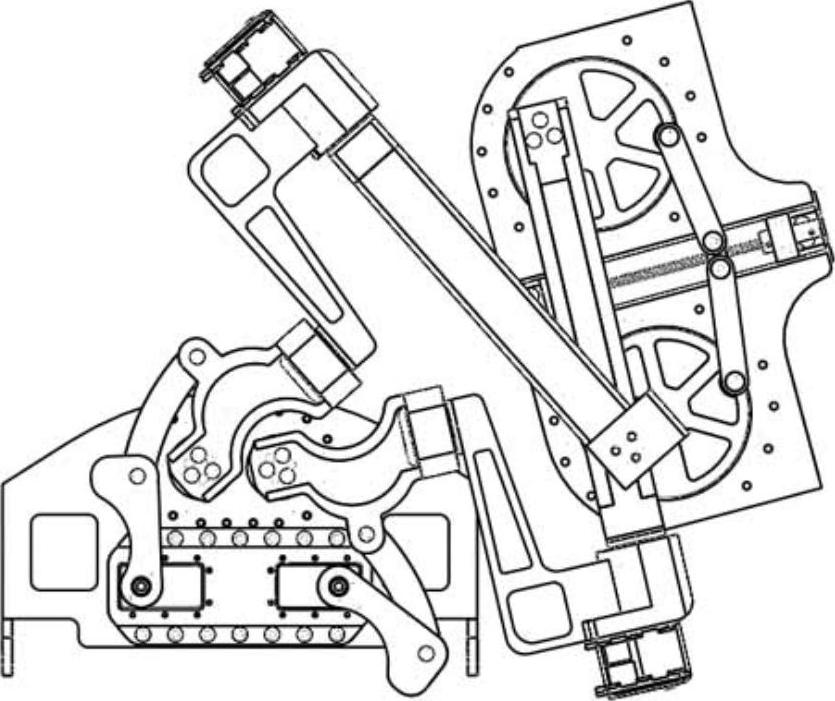
图9-50 腰部侧摆极限位置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。