



1.四肢机构设计
“外骨骼”智能健身与康复机器人如图9-12所示。
(1)四肢机构设计思路 根据9.3.1节所确定的人体模型,设计出如图9-13所示的“外骨骼”机器人四肢杆件结构,并对人体模型进行虚拟造型,并与四肢机构进行虚拟动态拟合实验,验证机构设计合理性。
肩部与臀部机架的设计灵感来源于承载式车身,如图9-14所示。在承载式车身中,工程师们通过利用不同形状的钣金件,将其互相进行点焊连接,组合成一体式的中空框架结构。这种结构的优点,其一,可以在中心部腾出较大空间,可以安放各种设备或乘客;其二,该结构又具有很高的强度和刚性,可以承受外来的较大载荷;其三,该结构有效利用了功能件的结构特性,充分发挥了所有零件的结构承载功能。
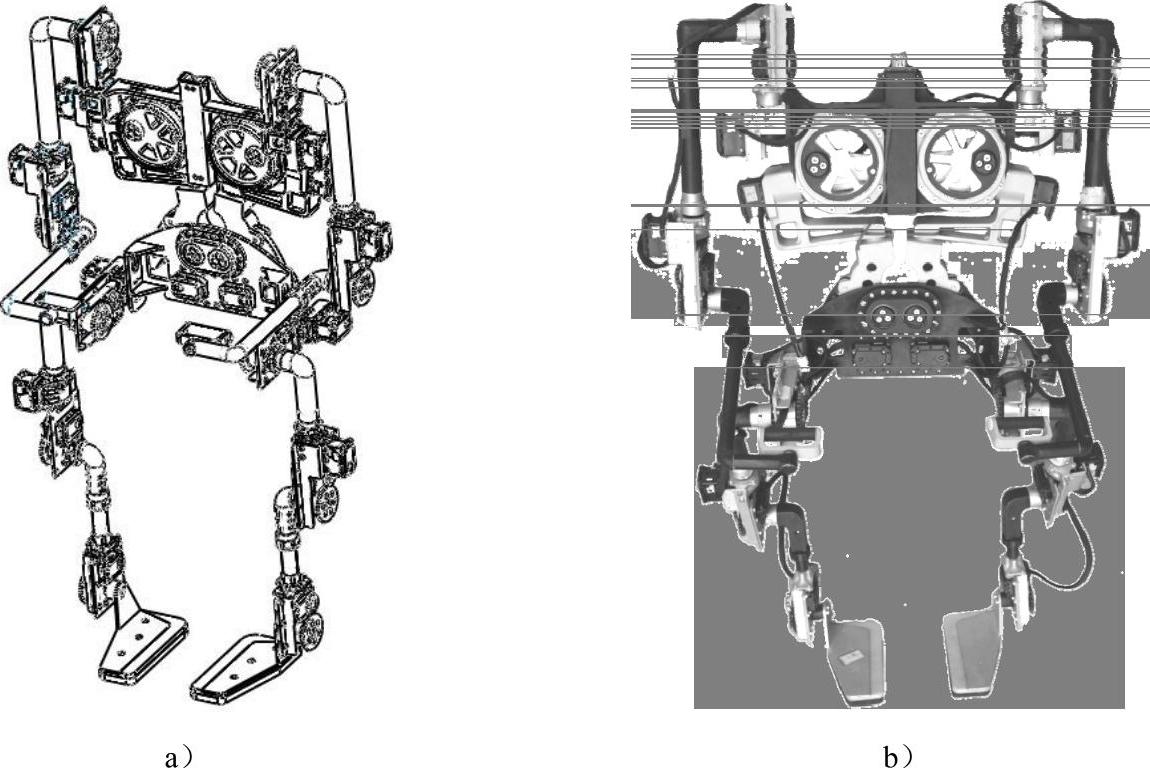
图9-12 “外骨骼”智能健身与康复机器人
a)设计整体效果图 b)实物样机图
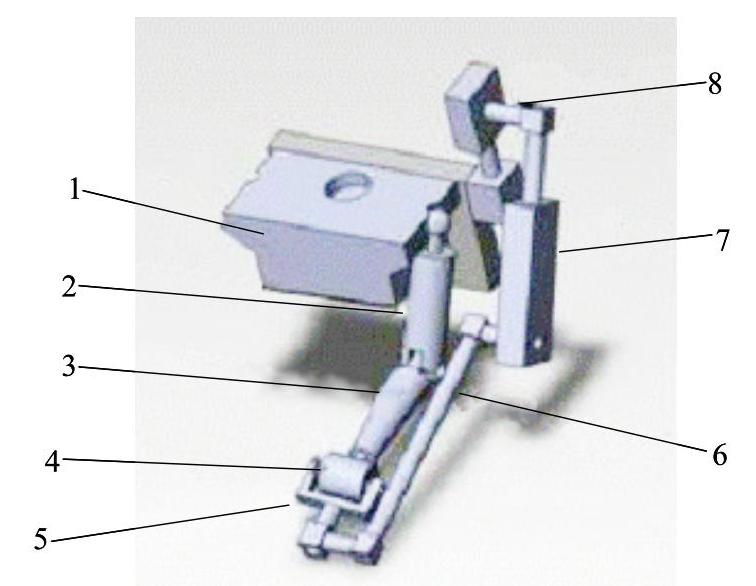
图9-13 “外骨骼”机器人四肢杆件结构
1—当量人体躯干 2—当量大臂 3—当量小臂 4—当量手部(握拳姿态) 5—机器人手柄 6—机器人小臂 7—机器人大臂 8—大臂-肩部连接杆(不属于肩部以下部分)
在对肩部及臀部机架的设计中,利用相近的设计思路,采用将钣金件(或其他方法成型零件)进行焊接或进行螺栓连接的形式。对于钣金基体件,根据机械结构安置要求,结合其易成型特点,将其弯折成了类似于图9-14中“底板部件”的形状,即空间板材;同时,在钣金件周边通过焊接方式布置加强肋,以增强机架承受各个方向弯扭的能力;“套盘座”、“轴承座”、“电动机架”等功能性零件,利用其不同方向的结构特性,将其与机架结合,最大限度地利用这些零件的结构性能,以增强机架的承载能力;根据增强后机架的承载能力,结合电动机、套盘等零件的安放位置需求,在其上确定安放位置,并在钣金基体上设置相应的镂空部位;最后,根据整体机架(包括轴承座等附属零件)的受载荷情况,在应力较小的部位设置相应的镂空孔。
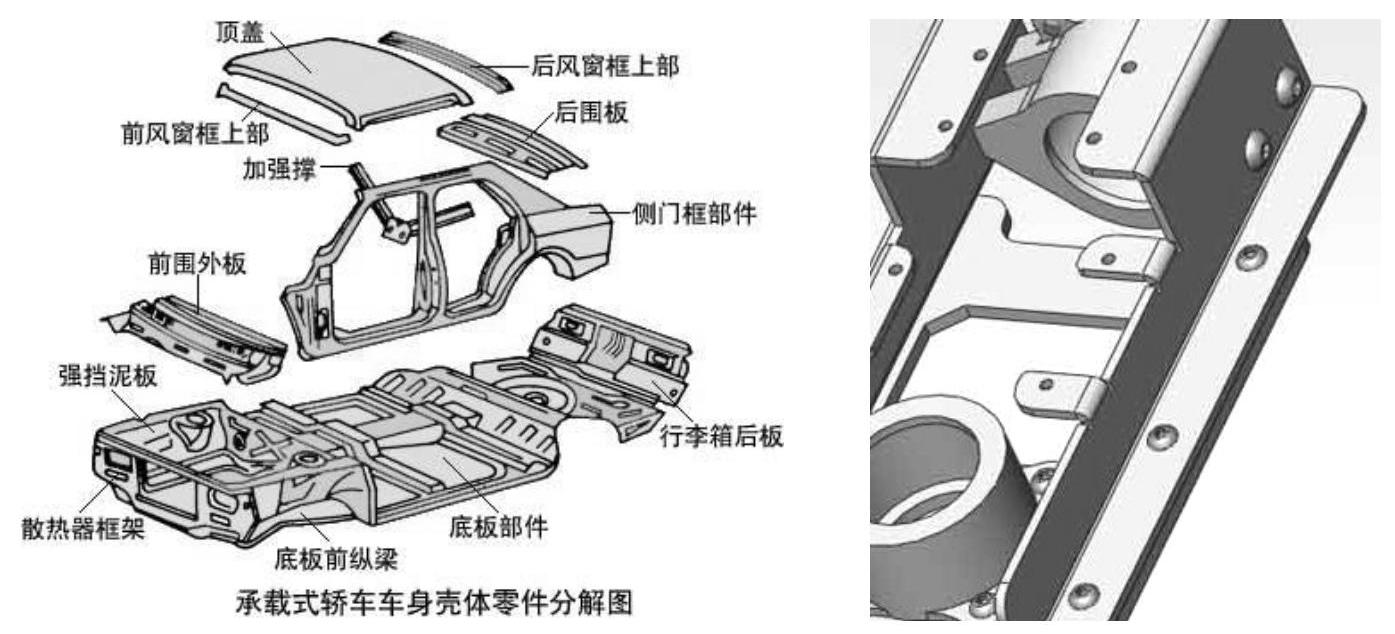
图9-14 四肢机架设计思路示意图
(2)四肢结构的具体设计
1)手臂整体结构示意图如图9-15所示。
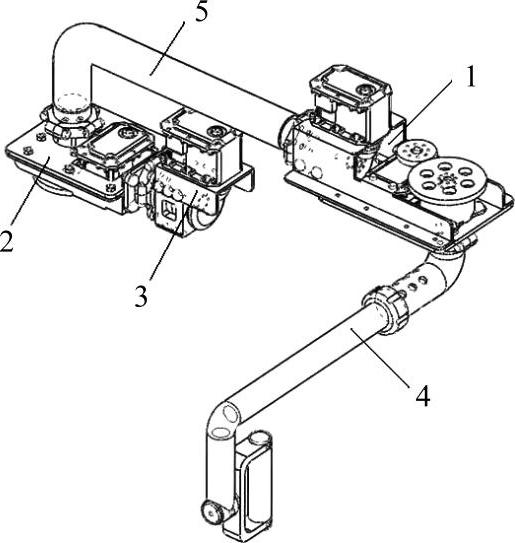
图9-15 手臂整体结构示意图
1—第一动力模块 2—第二动力模块 3—第三动力模块 4—手部伸长部件 5—大臂管(上肢部分包括第一动力模块、第二动力模块、第三动力模块、大臂管和手部伸长部件,其中大臂管为直角结构)
2)第一动力模块。第一动力模块包括钣金基体A、钣金A、钣金B、舵机A、舵机B、圆柱齿轮A、圆柱齿轮B、轴B、轴承座B、锥齿轮A、锥齿轮B、轴承座A和轴A。其连接关系为;钣金A和钣金B固接在钣金基体A上形成双层台阶式的基座,舵机A通过固定在基座的上层表面;锥齿轮A与舵机A的码盘连接,其中锥齿轮A的轴线处于竖直方向。锥齿轮A和轴线与其垂直的锥齿轮B啮合;锥齿轮B与轴A固接,轴A位于舵机A的正下方,即轴A动力输出的方向为水平向后。轴A通过轴承与轴承座A配合,轴承座A与基座连接。舵机B固定在基座的下层表面上,圆柱齿轮A与舵机B的码盘连接,圆柱齿轮A与圆柱齿轮B啮合,其中圆柱齿轮A和圆柱齿轮B的轴线均处于竖直方向;圆柱齿轮A与轴B连接,轴B动力输出的方向为竖直向下。轴B通过轴承与轴承座B配合,轴承座B固定在基座上。其结构示意图分别如图9-16~图9-18所示。
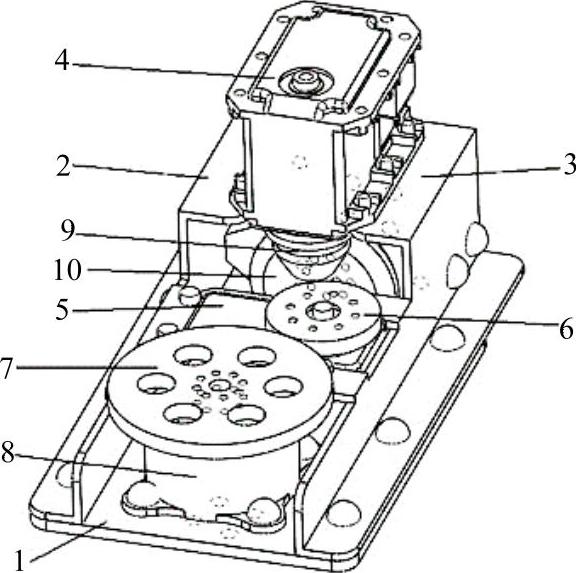
图9-16 第一动力模块结构示意图1
1—钣金基体A 2—钣金A 3—钣金B 4—舵机A 5—舵机B 6—圆柱齿轮A 7—圆柱齿轮B 8—轴承座B 9—锥齿轮A 10—锥齿轮B

图9-17 第一动力模块结构示意图2
1—轴B 2—轴承座A
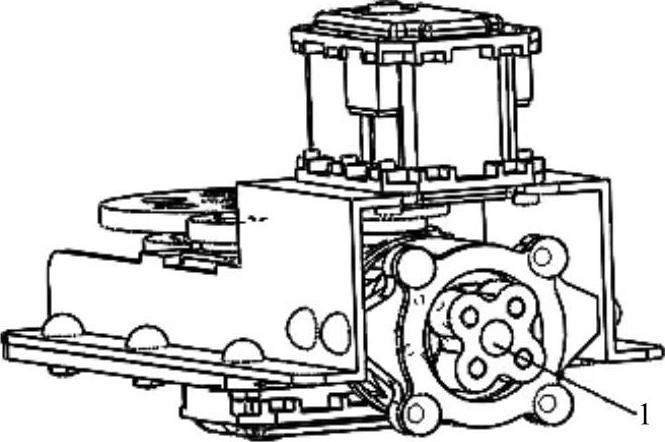
图9-18 第一动力模块结构示意图3
1—轴A
3)第二动力模块。第二动力模块包括钣金基体B、钣金C、钣金D、舵机C、圆柱齿轮C、圆柱齿轮D、轴C和轴承座C。其各部分的连接关系为:钣金基体B、钣金C和钣金D固连形成第二动力模块的基座;舵机C固定在基座上。圆柱齿轮C固定在舵机C的码盘上,圆柱齿轮D与圆柱齿轮C啮合,其中圆柱齿轮C和圆柱齿轮D的轴线均处于竖直方向。圆柱齿轮D与轴C固接,轴C的竖直向下输出动力。轴C通过轴承与轴承座C配合,轴承座C固定在基座上。其结构如图9-19和图9-20所示。
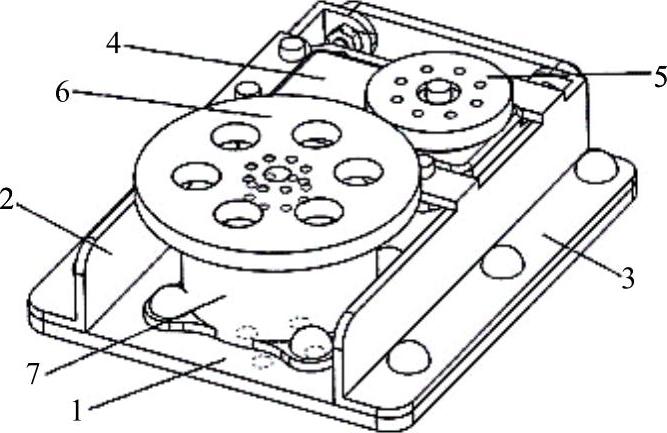
图9-19 第二动力模块结构示意图1
1—钣金基体B 2—钣金C 3—钣金D 4—舵机C 5—圆柱齿轮C 6—圆柱齿轮D 7—轴承座C

图9-20 第二动力模块结构示意图2
1—轴C
4)第三动力模块。第三动力模块包括钣金基板C、舵机D、锥齿轮C、锥齿轮D、轴D和轴承座D。其各部分的连接关系为:钣金基板C为第三动力模块的基座,舵机D固定在钣金基板C的上表面,锥齿轮C与舵机D的码盘固接,其中锥齿轮C的轴线处于竖直方向。锥齿轮C和轴线与其垂直的锥齿轮D啮合,锥齿轮D与轴D固接,轴D位于舵机D的正下方,即轴D水平向后输出动力。轴D同时通过轴承与轴承座D配合,轴承通过轴承座盖与轴承座D压紧,轴承座D固定在钣金基板C下表面。其结构如图9-21所示。
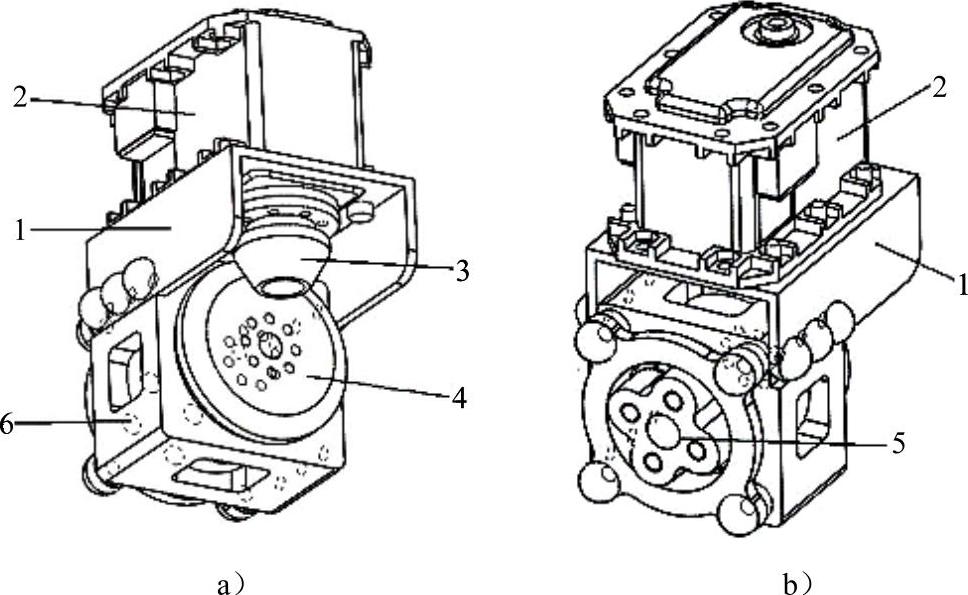
图9-21 第三动力模块结构
a)示意图1 b)示意图2
1—钣金基板C 2—舵机D 3—锥齿轮C 4—锥齿轮D 5—轴D 6—轴承座D
功能模块虚拟建模如图9-22所示。
手部伸长部件包括小臂大套管、锁紧调位机构A、小臂直管、小臂折弯管、手柄T管、手柄旋转轴、手柄分叉和手柄套管。其各部分的连接关系为:小臂大套管为直角结构,其竖直部分的端部通过锁紧调位机构A与小臂直管连接,小臂直管的另一端通过直角弯管与小臂折弯管连接;小臂折弯管的另一端和轴线与其垂直的手柄T管连接。手柄T管的上端连接手柄分叉,手柄分叉为U形结构,手柄分叉的左右两端之间安装手柄芯管,手柄芯管外套装橡胶制的手柄套管。手柄芯管的两个端面分别安装有手柄端盖;手柄旋转轴套装在手柄T管内;在手柄分叉与手柄T管的连接处,手柄分叉与手柄旋转轴连接。其结构如图9-23所示。
锁紧调位机构A的具体结构为:小臂直管套在小臂大套管中,在小臂大套管内部与小臂直管的连接端有两个相对安装的花型松紧环,在小臂直管上和小臂大套管的连接端安装有沉头螺钉,沉头螺钉的螺钉头未完全沉入管壁,即沉头螺钉在管壁上有凸起;同时在小臂大套管的内壁加工有与沉头螺钉上的凸起相对应的直槽。其结构如图9-24所示。
手部模块的整体连接关系为:手部伸长部件中小臂大套管水平部分的端部与第一动力模块中轴B的动力输出端连接,第一动力模块中轴A的动力输出端与大臂管的一端连接,大臂管的另一端与第二动力模块中轴C的动力输出端连接;第三动力模块中轴D的动力输出端与第二动力模块的基座连接,第三动力模块驱动第二动力模块整体转动。
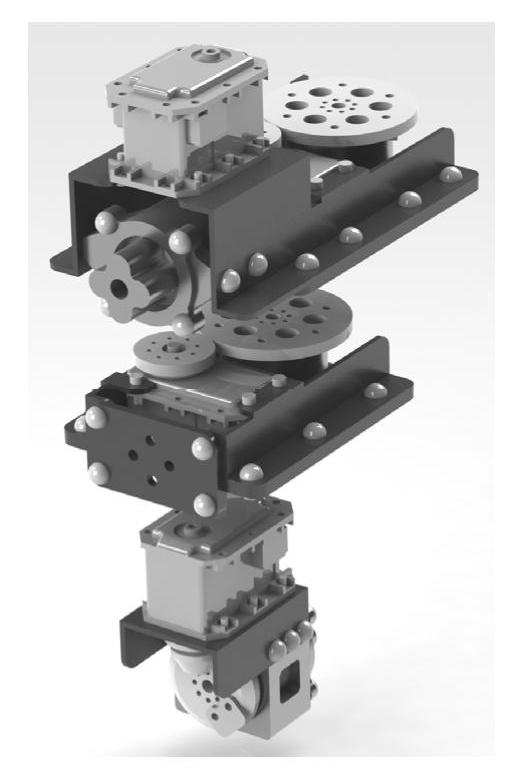
图9-22 功能模块虚拟建模
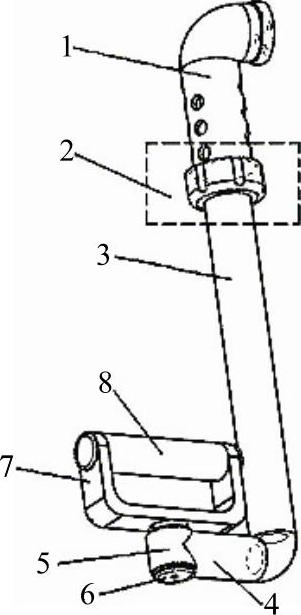
图9-23 手部伸长部件机构示意图
1—小臂大套管 2—锁紧调位机构A 3—小臂直管 4—小臂折弯管 5—手柄T管 6—手柄旋转轴 7—手柄分叉 8—手柄套管

图9-24 锁紧调位机构A结构示意图
9—松紧环锁紧扣 10—花型松紧环 11—沉头螺钉 12—凹槽 13—直槽
脚部模块包括第四动力模块、第五动力模块、第六动力模块、第七动力模块、大腿管、脚部伸长部件和足部部件。其中大腿管为直角结构;第四动力模块与第一动力模块结构相同,第六动力模块与第三动力模块结构相同;第五动力模块与第七动力模块均和第二动力模块结构相同。其结构如图9-25所示。
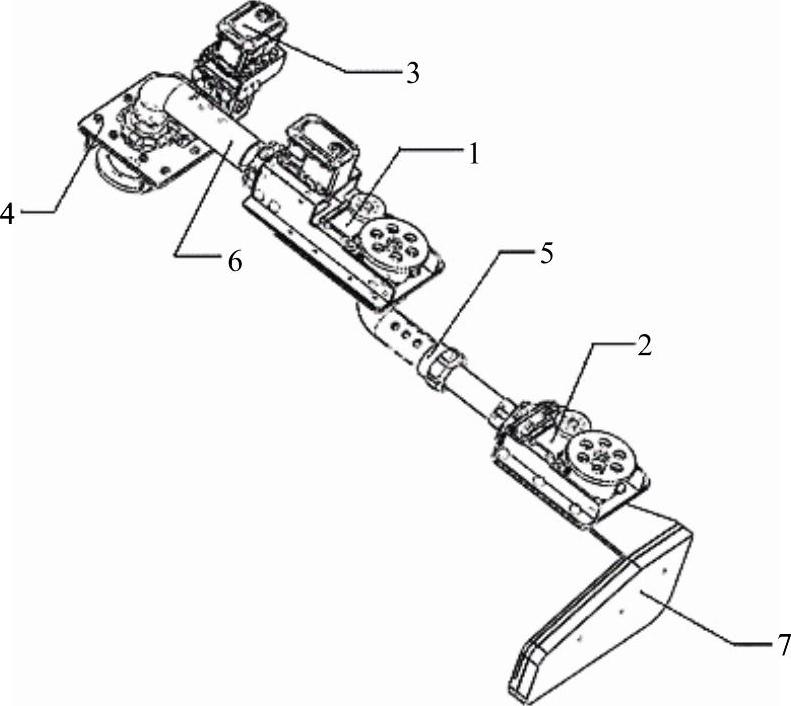
图9-25 脚部模块结构示意图
1—第四动力模块 2—第五动力模块 3—第六动力模块 4—第七动力模块 5—脚部伸长部件 6—大腿管 7—足部部件
脚部伸长部件包括小腿大套管、小腿直管、锁紧调位机构B和小腿底端连接件。其中锁紧调位机构B与锁紧调位机构A的结构相同;小腿大套管竖直部分的端部通过锁紧调位机构B与小腿直管连接,小腿直管的另一端与小腿底端连接件相连。足部部件包括足部钣金、塑料板和橡胶垫;其中足部钣金竖直放置,塑料板和橡胶垫均水平放置,足部钣金与塑料板连接,塑料板与橡胶垫7连接。其结构如图9-26所示。足部部件结构如图9-27所示。
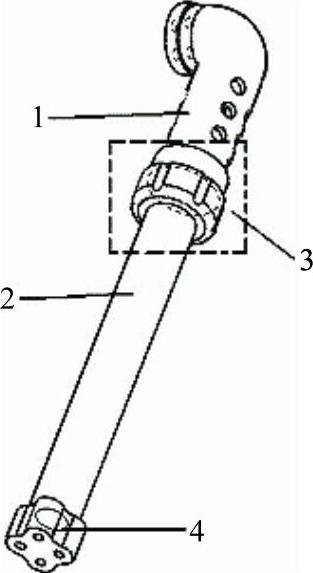
图9-26 脚部伸长部件结构示意图(https://www.xing528.com)
1—小腿大套管 2—小腿直管 3—锁紧调位机构B 4—小腿底端连接件

图9-27 足部部件结构示意图
5—足部钣金 6—塑料板 7—橡胶垫
脚部模块的整体连接关系为:足部部件中足部钣金的顶部与第五动力模块的动力输出轴连接,第五动力模块的基座与脚部伸长部件中的小腿底端连接件相连。小腿大套管水平部分的端部与第四动力模块的竖直动力输出轴连接,第四动力模块的水平动力输出轴与大腿管的一端连接,大臂管的另一端与第七动力模块的动力输出轴连接。第六动力模块的动力输出轴与第七动力模块的基座连接,第六动力模块驱动第七动力模块整体转动。
需要特别说明的是,为了对小臂直管的位置进行定量调节,在小臂直管上安装沉头螺钉的位置沿其外圆周面加工凹槽,当小臂直管拧入后,可以通过小臂大套管上的观察孔观察凹槽的位置进而判断小臂直管在小臂大套管内的相对位置。
(3)各驱动单元轴系的设计 驱动单元中轴系设计是难点也是关键点,在设计过程中需要考虑强度、承载能力、体积、重量、各元件配合尺寸等各方面因素。肘部和肩部驱动单元轴系分别如图9-28和图9-29所示。
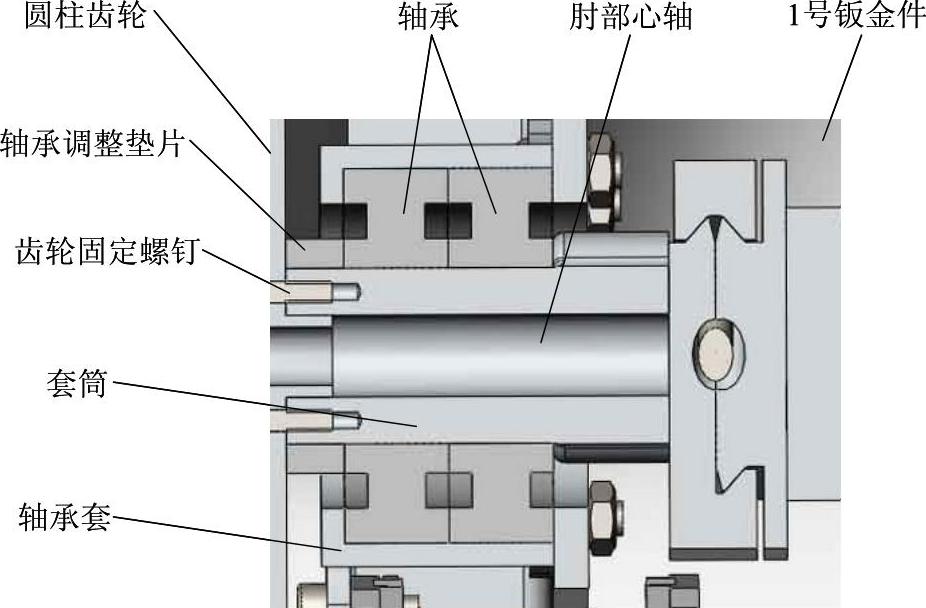
图9-28 肘部驱动模块轴系设计示意图
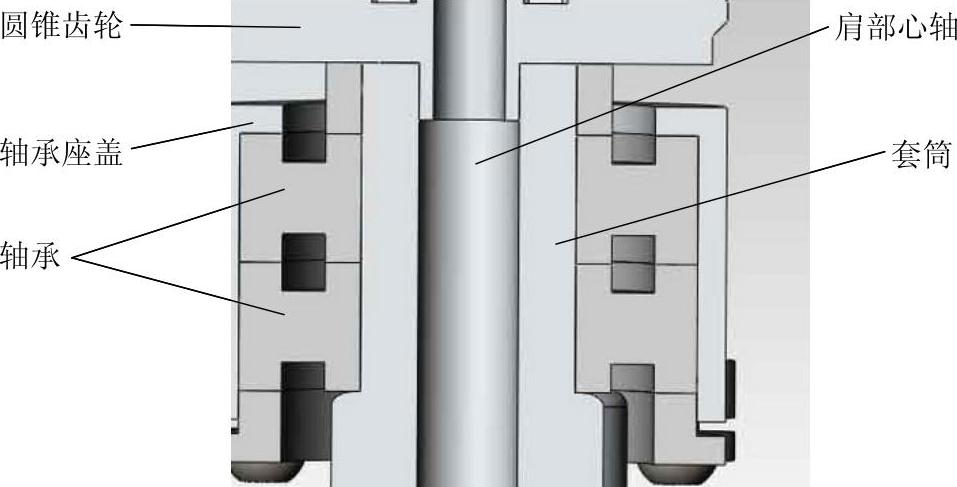
图9-29 肩部驱动模块轴系设计示意图
在所有驱动模块中,圆柱齿轮组型号分别为2m、14齿与2m、26齿,齿宽6mm;所有圆锥齿轮副分别为1m、18齿与2m、36齿,齿面宽6mm。
2.腰部机构设计
(1)腰部机构设计思路 腰背运动结构的设计一直是人体随动机构设计的一大难题。本作品所设计的背部8R空间连杆机构在结构方面实现了较大的创新,该结构的采用使机器人能够实现前后、左右双自由度的运动,因而可实现对腰背部绝大多数肌肉群的锻炼:包括腹直肌、腹横肌及腹外斜肌。同时该结构只需4个驱动装置便可完成所有动作,不仅节省空间、减轻重量,强化了功能,更有效降低了由于高性能驱动元件带来的成本。
“外骨骼”智能健身与康复机器人的腰背部机构简图和虚拟样机图如图9-30所示。
为适应不同身材的使用者,在腰背部设计有长度调节机构,其机构简图如图9-31所示。
(2)腰部机构运动规律分析 根据“人体动作捕捉实验”所得实验数据,进行腰部机构运动规律分析。通过绘制人体运动轨迹,进行运动学分析,以校核脊柱理论模型并修整腰部机构设计参数。腰背部机构侧屈和前屈动作轨迹拟合图如图9-32和图9-33所示。
根据运动学分析结果,所设计腰部机构设置可以精确拟合人体脊柱侧屈动作的运动轨迹。
由以上运动学拟合分析结果可见,该机构设置可以拟合人体脊柱前屈动作的运动轨迹。
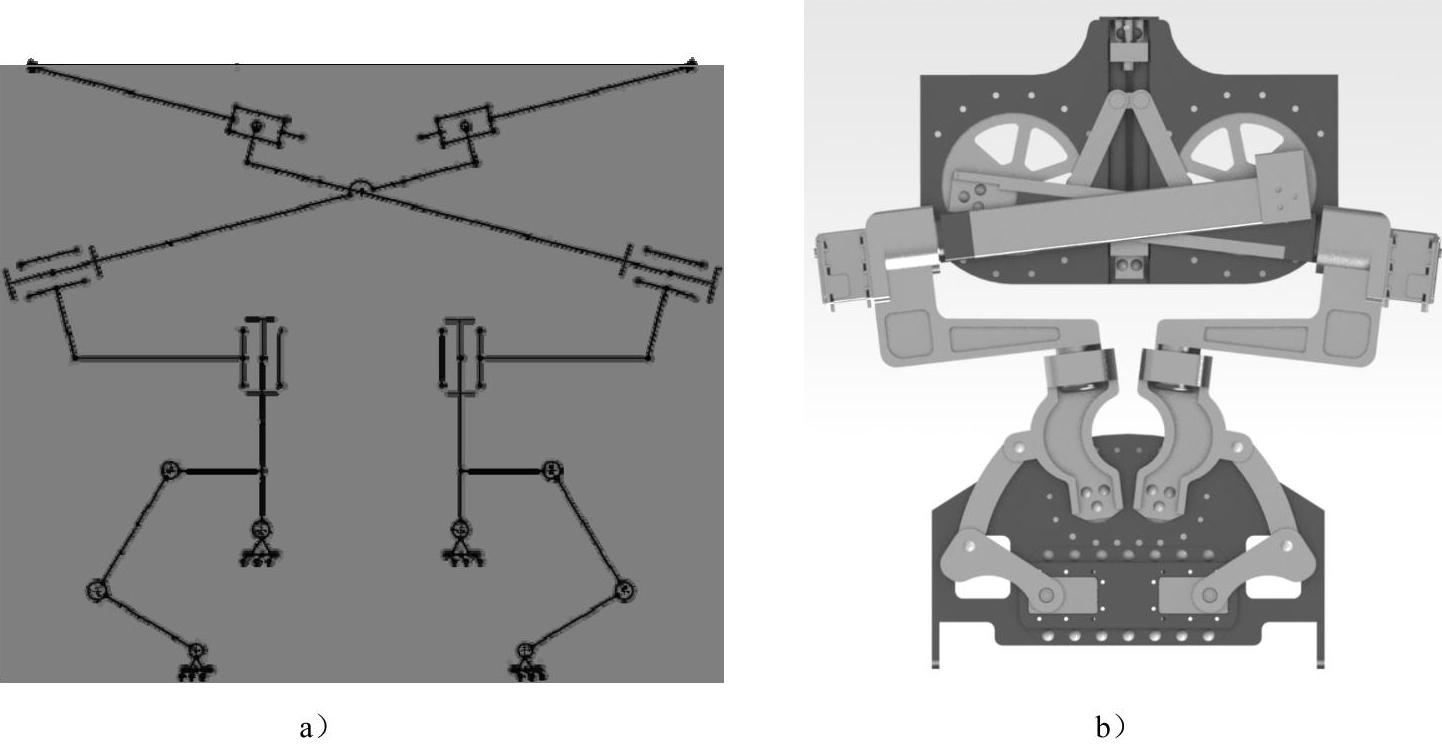
图9-30 腰背部运动机构
a)机构简图 b)虚拟样机图
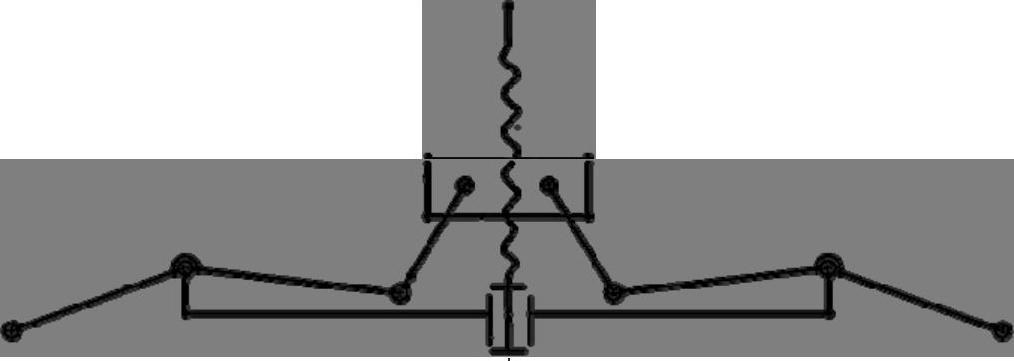
图9-31 长度调节机构机构简图
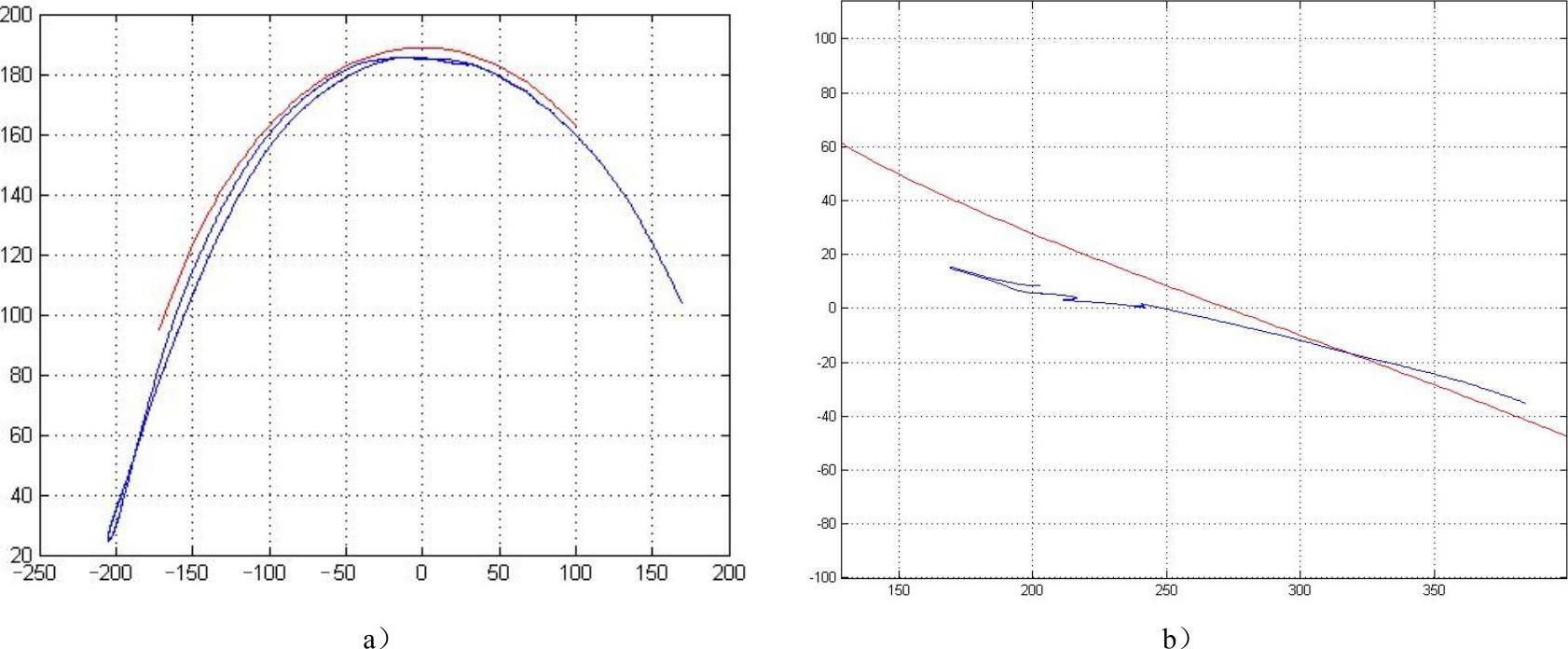
图9-32 腰背部机构侧屈动作轨迹拟合图
a)侧屈运动重心轨迹拟合图(正面) b)侧屈运动重心轨迹拟合图(侧面)
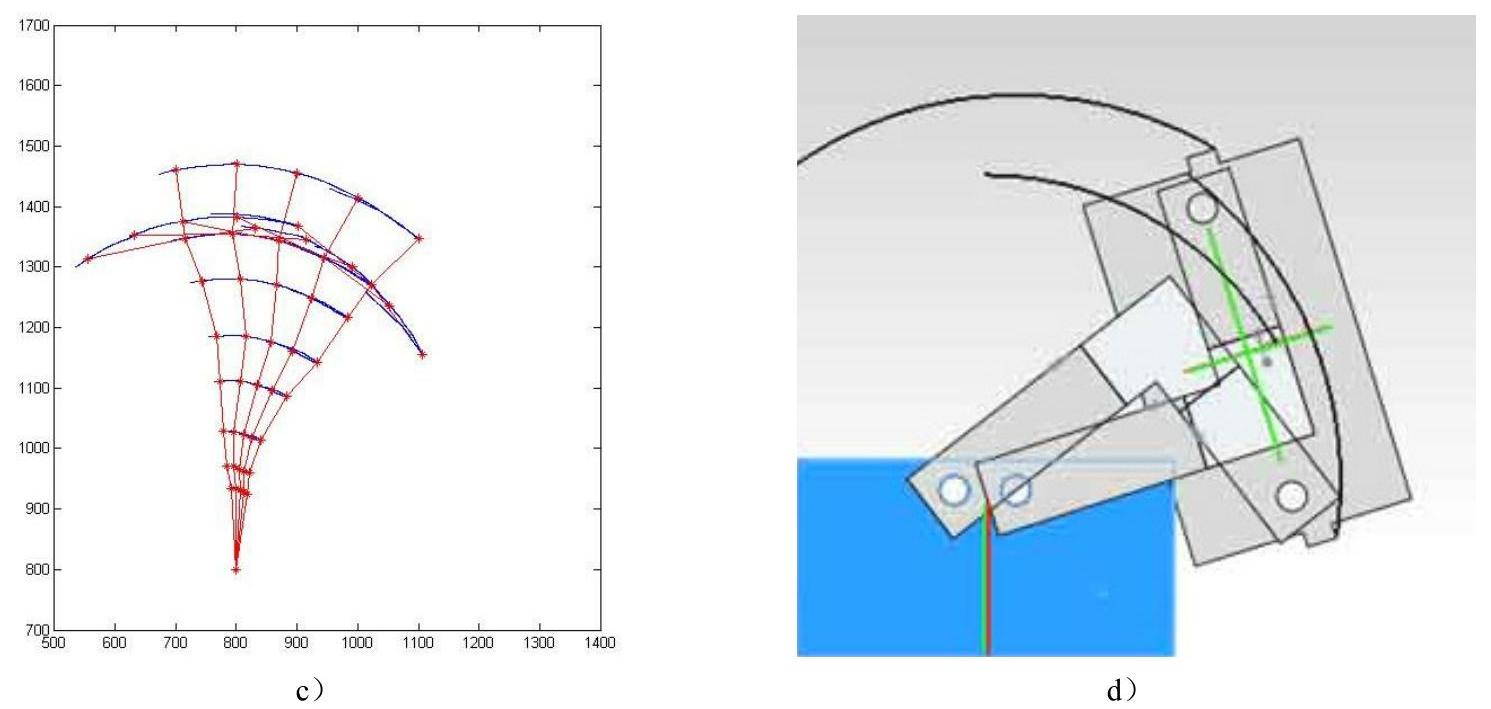
图9-32 腰背部机构侧屈动作轨迹拟合图(续)
c)人体侧屈运动拟合图 d)腰背部机构简化模型的侧屈运动图

图9-33 腰背部机构前屈动作轨迹拟合图
a)腰背部结构简化模型的前屈运动 b)人体前屈运动拟合图 c)腰背部机构前屈动作轨迹重心轨迹拟合图
(3)腰背部设计细节 躯干模块背面结构示意图如图9-34所示。

图9-34 躯干模块背面结构示意图
1—臀部基板 2—腰部舵机固定架 3—舵机E 4—腰部驱动连杆A 5—腰部驱动连杆B 6—臀部承重连杆 7—臀部承重杆前端盖 8—肩部钣金基体 9—丝杠 10—丝杠端套A 11—丝杠端套B 12—步进电动机 13—腰部大套盘 14—肩部承重套杆 15—舵机F 16—背部上端承重杆 17—腰部上部承重连杆 18—腰部大套盘转动撑杆 19—肩部跨越件
躯干模块包括腰部系统和背部系统。
1)腰部系统包括臀部基板、腰部舵机固定架、左侧腰部机构和右侧腰部机构。腰部舵机固定架固定在臀部基板下端,并沿臀部基板的竖直中心线左右对称,左侧腰部机构和右侧腰部机构在臀部基板上左右对称布置,下面仅以左侧腰部机构为例具体介绍其结构。
左侧腰部机构包括舵机E、腰部驱动连杆A、腰部驱动连杆B、臀部承重连杆、臀部承重轴和臀部承重杆前端盖。其中臀部承重连杆为半圆形结构,该半圆形结构的对称线沿水平方向,臀部承重连杆有三个分支,分别位于半圆形结构的顶部、底部及外圆周;其中外圆周上的分支位于其水平对称线的位置。左侧腰部机构的具体连接关系为:舵机E固定在腰部舵机固定架的左侧,舵机E的输出轴与腰部驱动连杆A相连,腰部驱动连杆A的另一端与腰部驱动连杆B动连接,腰部驱动连杆B的另一端与臀部承重连杆外圆周上的分支连接。
在臀部基板上腰部舵机固定架上方,加工有臀部承重轴的安装孔;臀部承重轴通过轴承安装在该安装孔内,臀部承重轴的一端与臀部承重连杆底部的分支固连,另一端穿过臀部基板与臀部轴承座动连接,臀部轴承座固定在臀部基板上。臀部承重轴与臀部轴承座连接的一端同时与臀部承重杆前端盖固连;臀部承重连杆顶部的分支与背部系统相连。
2)背部系统包括肩部钣金基体、丝杠、丝杠端套A、丝杠端套B、步进电动机、左部运动机构与右部运动机构。
肩部钣金基体为左右对称结构,在其竖直中心线上加工有丝杠安装槽,丝杠通过其顶部的丝杠端套A和底部的丝杠端套B竖直安装在丝杠安装槽内。丝杠端套A和丝杠端套B的外圆周分别安装有轴承和轴承座,所述轴承座固定在肩部钣金基体上。滑动块安装在丝杠上,滑动块与丝杠配合,可沿丝杠上下移动。步进电动机的输出轴与丝杠的顶部相连;左部运动机构与右部运动机构沿丝杠左右对称,下面仅以左部运动机构为例具体介绍其结构。
左部运动机构包括腰部大套盘、肩部承重套杆、舵机F、背部上端承重杆、肩部套盘座、腰部芯轴前端盖、肩部下端承重传动轴、腰部芯轴、腰部上部承重连杆和腰部大套盘转动撑杆。其中腰部上部承重连杆为直角结构,该直角结构水平部分的端部有竖直向下的连接座。左部运动机构各部分之间的连接关系为:臀部承重连杆顶部的分支与腰部上部承重连杆上的连接座动连接;同时腰部上部承重连杆上的连接座与臀部承重杆前端盖固连。腰部上部承重连杆竖直部分上端的外侧固定有舵机F,舵机F的码盘与肩部下端承重传动轴固连。肩部下端承重传动轴与背部上端承重杆连接,背部上端承重杆套装在肩部承重套杆表面的滑槽内,从而形成一个滑槽结构,相互只能沿滑槽方向运动。
在肩部钣金基体上,丝杠的右侧加工有腰部大套盘的安装孔,腰部大套盘位于该安装孔内。腰部大套盘与腰部大套盘转动撑杆动连接,腰部大套盘转动撑杆的另一端与滑动件动连接。同时腰部大套盘的另一端穿过肩部钣金基体与肩部套盘座动连接,肩部套盘座与肩部钣金基体固连。在腰部大套盘上加工有腰部芯轴的安装孔,腰部芯轴安装在安装孔内,并与腰部大套盘动连接。腰部芯轴的一端与肩部承重套杆的端部连接,另一端穿过腰部大套盘与腰部芯轴前端盖固连。躯干模块正面结构示意图如图9-35所示。
由于左部运动机构和右部运动机构的肩部承重套杆在肩部钣金基体上交叉安装,为了保证两边的运动机构互不干涉,右部运动机构的肩部承重套杆则通过肩部跨越件与位于肩部钣金基体上丝杠左侧的腰部芯轴固连。腰部芯轴的剖视图如图9-36所示。肩部承重套杆处的剖视图如图9-37所示。
整体连接关系为:两个手部模块分别通过各自第三动力模块的基座固接在躯干模块中肩部钣金基体的左右两侧,两个脚部模块分别通过各自第六动力模块的基座固接在躯干模块中臀部基板的左右两侧,两个手部模块、两个脚部模块及躯干模块间的运动相互独立。

图9-35 躯干模块正面结构示意图
1—腰部舵机固定架 2—舵机E 3—臀部承重连杆 4—臀部承重杆前端盖 5—肩部钣金基体 6—舵机F 7—肩部套盘座 8—腰部芯轴前端盖 9—腰部上部承重连杆

图9-36 腰部芯轴处的剖视图
1—腰部芯轴前端盖 2—腰部芯轴 3—肩部跨越件

图9-37 肩部承重套杆处的剖视图
1—肩部承重套杆 2—舵机F 3—背部上端承重杆 4—肩部下端承重传动轴
3.润滑与密封
由于考虑到该作品工作地点为家庭住宅及健身房等室内场所,其周边环境往往需要保持清洁。液体润滑剂尽管具有很好的润滑与散热效果,但因其流动性太强,可能会造成对周边环境的污染;同时,液体润滑剂可能引起某些非金属塑料零件的变形。因此,该作品所有活动部位的润滑采用固体润滑方式,即脂润滑润滑方式。对于驱动单元轴系中的轴承,选用塑料轴承专用润滑脂润滑。对于其余装有特氟龙润滑套的轴,与肩部的滑轨,选用特“氟龙润滑脂”(主要成分为特氟龙粉末与稠化剂)进行润滑。其原因在于:①该润滑脂的有效成分与润滑套的材料相同,无需担心互相的化学变性反应;②该润滑脂具有较强的附着能力,可以在导轨间形有效成持久的润滑膜;③该润滑脂性价比高,售价仅为40元/100克,符合经济性要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。