



1.人体四肢的构造与运动模型
解剖学研究人体运动的基本思想是:人体形态结构与运动技能的统一性和相互制约性。从人体解剖学角度,得到上肢与下肢生理结构的定义:上肢为一构成人体的骨骼链,每侧由3块长骨与27块小骨组成,从肩峰一直延伸到臂端。上肢不仅可以在关节处旋转,同时在小臂部位其可以绕自身旋转。其可以形成一灵活的运动链,依靠肌肉牵引实现所连骨骼与手臂肢端的各方向运动。
类似的,下肢同样为一构成人体的骨骼链,每侧由3块长骨与24块小骨组成,从臀部髋关节一直延伸到脚部肢端。下肢同样可以在关节处旋转,同时在小腿部位其可以绕自身旋转,形成一灵活的运动链,依靠肌肉牵引实现所连的骨骼与脚部肢端的各方向运动。
由于人体是一个形体和结构异常复杂的生物控制动力学系统,故只能对其进行简化。最常用的很具代表性的人体运动学模型有:1964年Hanavan建立的Hanavan十五刚体人体数学模型和1989年Yeadon建立的由四十个环节组成的Yeadon人体数学模型。
根据“外骨骼”智能健身与康复机器人的特点,选用Hanavan人体模型,并对其进行简化,分别得到了三刚体构成的五自由度杆件模型,如图9-5所示。
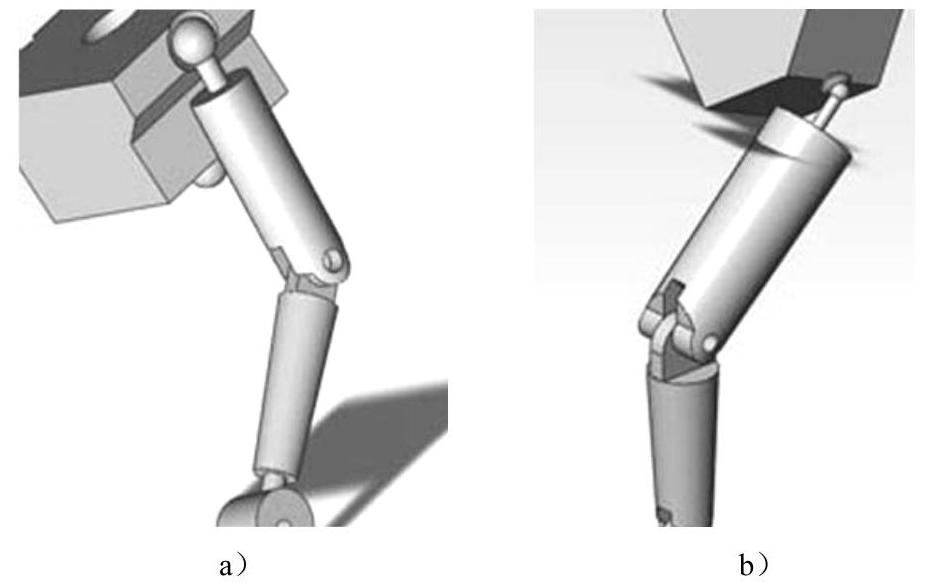
图9-5 三刚体构成的五自由度杆件模型
a)上肢模型 b)下肢模型
2.人体脊柱的构造与运动模型
脊柱为一构成人体的骨骼组,由26节椎骨一块一块相聚叠成,从头骨的底部一直延伸到尾骨。脊柱由前后方观看,曲线为一直线,但由侧方观看脊柱有凸弯的弧度。其不仅承受人体重量,而且还能形成一灵活的运动链,牵引肌肉及所连的器官实现人体上半身的各方向运动。选用Hanavan人体模型建立脊柱模型,通过合理简化得到一个二刚体构成的三自由度杆件模型,如图9-6所示。在确定设计所需的人体运动学模型之后,对人体相关各部位的具体尺寸,以及各数据随着身高的变化规律进行了文献资料查阅。作品基于Hanavan人体模型的各肢体尺寸均按照国家标准GB10000—1988《中国成年人人体尺寸》中对我国公民肢体尺寸的描述所确定。
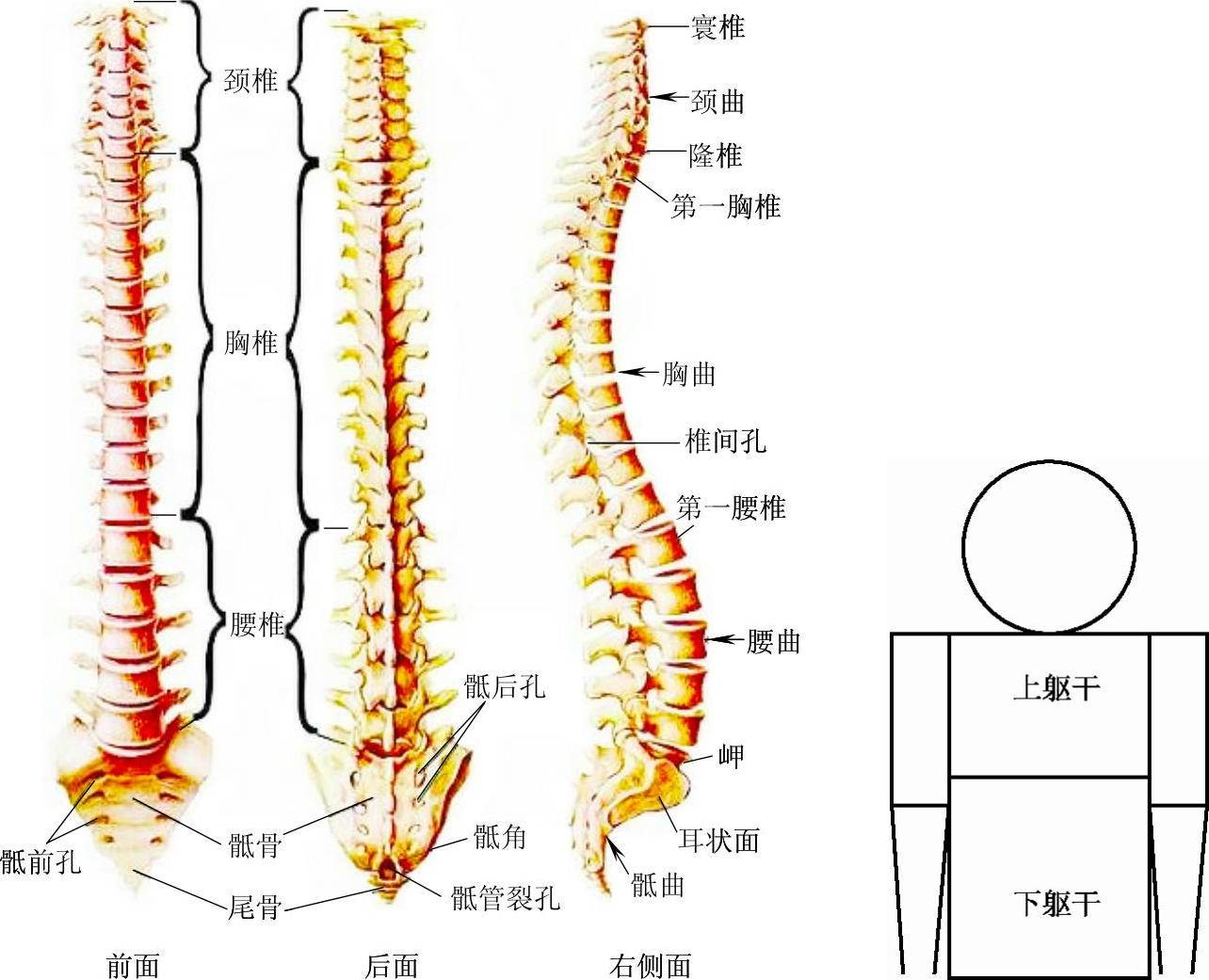
图9-6 人体脊柱结构及躯干分区
3.“外骨骼”机器人的工作前提
根据Hanavan人体模型,在“外骨骼”类机械实际工作的过程中,机器“躯干”与人体躯干间将会通过背带、腰带、髋带分别固定,形成近似刚性连接的两个运动整体,即人体上躯干与机器“上躯干”相固连,人体下躯干与机器“下躯干”相固连。通过这两处连接,机械“躯干”与人体躯干间将会形成一个通过面接触闭合的空间运动链,在使用过程中形成一个整体运动体系。同时,在人、机躯干间固连的前提下,人体四肢与机器“四肢”又将会形成四对两组空间中点闭合的运动链。其中每一肢端对应一对运动链,上下肢各为一组形式相同的运动链。在每个闭合的运动链中,人体的肢端(手部、脚部)分别与机器的肢端(手柄、踏板)通过抓握的形式,或是带状物捆绑的形式相连接。由于连接处的活动量有限,同样可以将此部位的连接近似看作为刚性连接。为了满足工作前提,需要满足如下要求:
1)在机器人的整个工作过程中,以人体运动为核心,以拟合人体运动为第一要务,在满足机器人贴合人体完成各动作的前提下,保证此处运动链的运动流畅性与对人体的贴合性(即机器人与人体两物体的接触面在运动中不发生相对滑动、转动或分离)。
2)在机器人的整个工作过程中,保证机器“四肢”不与人体四肢发生任何干涉,以保证使用的舒适性与安全性。同时,肢端对应的空间闭合运动链同样应保证运动的流畅性与对人体的贴合性(即在人机不发生“肢体干涉”的前提下,机器肢端运动轨迹与人体肢端运动轨迹可以在空间中拟合)。
4.人体动作捕捉实验
(1)实验目的 项目组在对人体各部分结构与运动机理进行了较深入的了解后,利用国内先进的人体动作采集实验室的实验设备完成了人体动作捕捉实验。
1)采集各健身动作的标准动作数据:利用该实验的数据,可以为此产品的“智能健身教练”功能提供第一手的教学标准动作资料,确定肢端运动轨迹,从而确定演示与教学中机器各肢体关节的控制细节。
2)获得脊柱的实际运动轨迹,弥补Hanavan人体模型对脊柱运动规律过度简化的缺陷。
3)以皮肤为运动研究对象,在考虑其拉伸的情况下,获得实际皮肤上各点的运动轨迹(不同于脊柱骨骼刚体运动轨迹),并以此轨迹为基准尽最大程度减小机器与躯干上半部分间的滑动。
(2)实验内容
1)实验仪器有:①8台红外高速摄像机,自带红外光源;②红外线反射球,直径10mm,通过双面胶带粘贴在受试者的皮肤或紧身衣物上;③后台数据处理设备等。
2)实验对象。人体动作捕捉实验实验对象见表9-1。实验现场如图9-7所示。(https://www.xing528.com)
表9-1 人体动作捕捉实验实验对象


图9-7 人体动作捕捉实验现场
3)人体标记点位置。
①上肢:肩关节前、后、上(肩峰)、外侧各布置一个采集点、肘关节旋转轴两侧各布置一个采集点、手部抓握一长130mm、截面直径30mm的圆柱手柄,在手柄两端截面中心各布置一采集点。
②下肢:髋关节前、后、外侧各布置一采集点,股骨大转子处布置一采集点、膝关节两侧分别布置采集点,脚踝前后转动轴线上两侧布置采集点,脚掌所在平面的前、后、左、右四个边缘位置分别布置采集点。
③躯干:在第一颈椎、第七颈椎、第四胸椎、第八胸椎、第一腰椎、第五腰椎、尾椎处布置一列采集点;髋骨最外侧布置一对采集点。
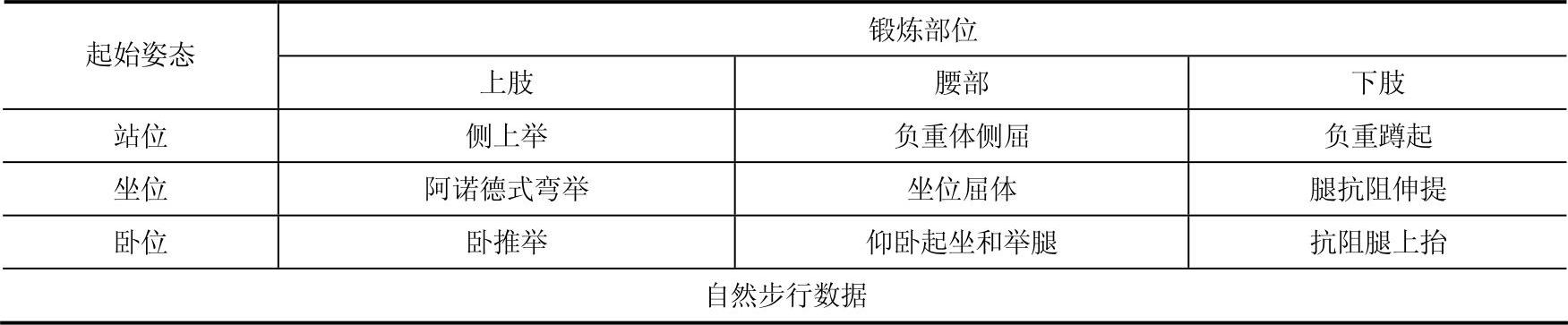
4)动作采集列表见表9-2。
表9-2 动作采集列表
(3)数据处理与分析
1)数据品质分析:实验通过使用光学三坐标测量系统(NDI)获得了整个运动采集过程中各采集点在不同时刻的空间绝对坐标(原点在实验初由基准设备确定)。采样频率为200Hz(最高支持500Hz),坐标X、Y、Z方向的精度均为0.1mm。由于人体的遮挡作用,数据采集过程中会出现某些采集点坐标的暂时性丢失(空白阶段时长一般不超过0.5s)。由此造成的数据空缺通过计算机自动插补补全。可信数据比例相对于总体数据不少于95%。
2)后期处理:标记出数据列表中各采集点名称与顺序,在MATLAB软件中绘制采集点间连线和各点的运动轨迹。绘制轨迹如图9-8~图9-11所示。
从脊柱的运动轨迹中可以发现,第一胸椎至尾椎段的弯曲主要集中在腰椎段。胸椎段与骶骨-尾椎段基本呈现出刚性的状态。实验数据验证了Hanavan人体模型两刚体躯干的合理性,同时为之后的具体机构设计提供了坚实的数据基础。
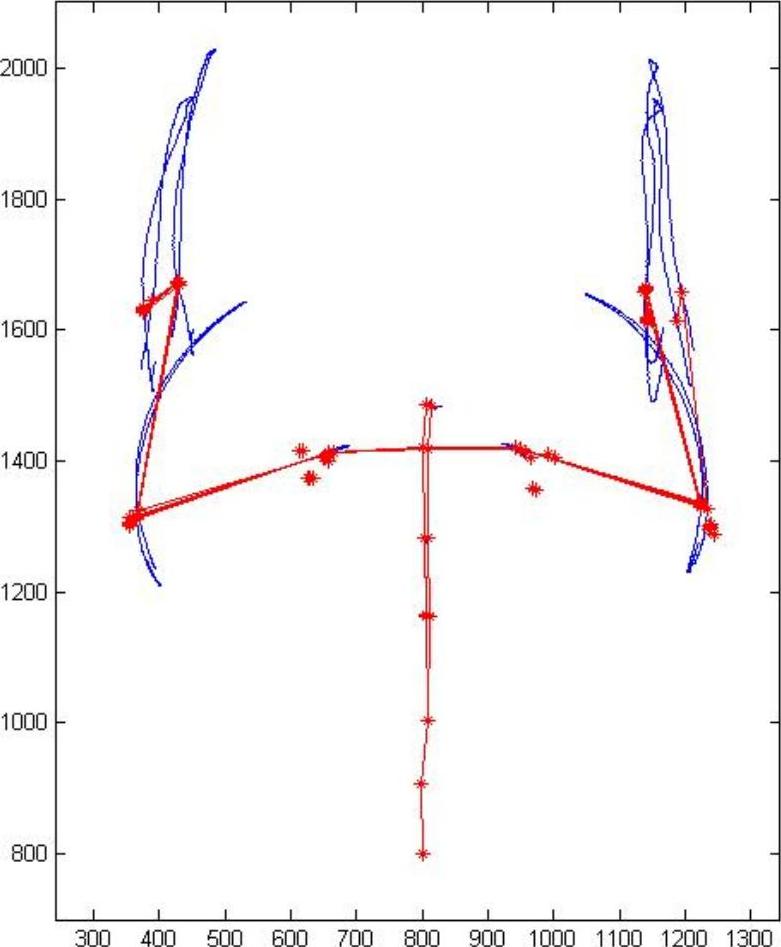
图9-8 坐姿侧上举的轨迹图
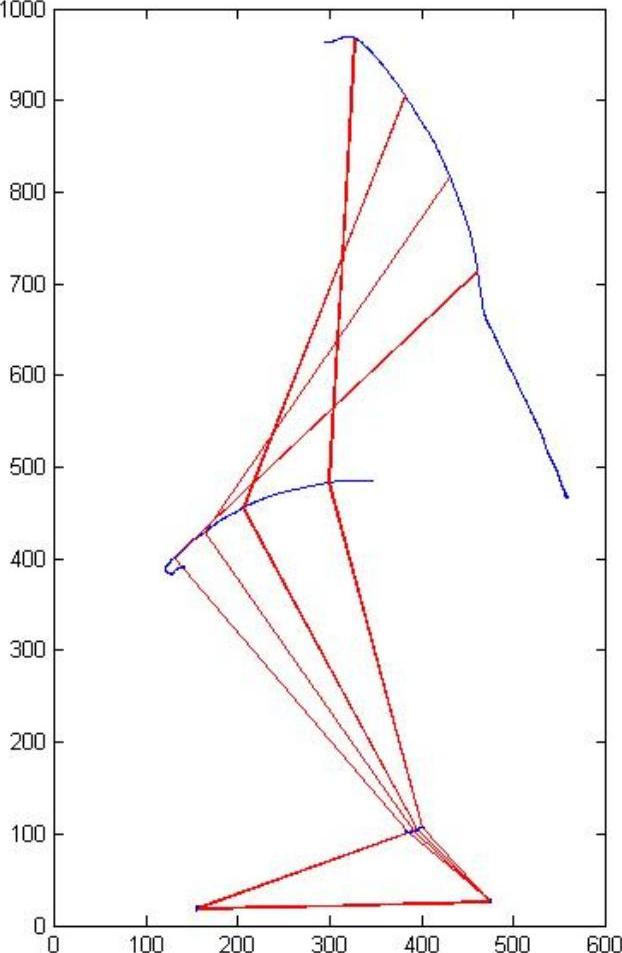
图9-9 站姿蹲起的轨迹图

图9-10 坐位体前倾的轨迹图
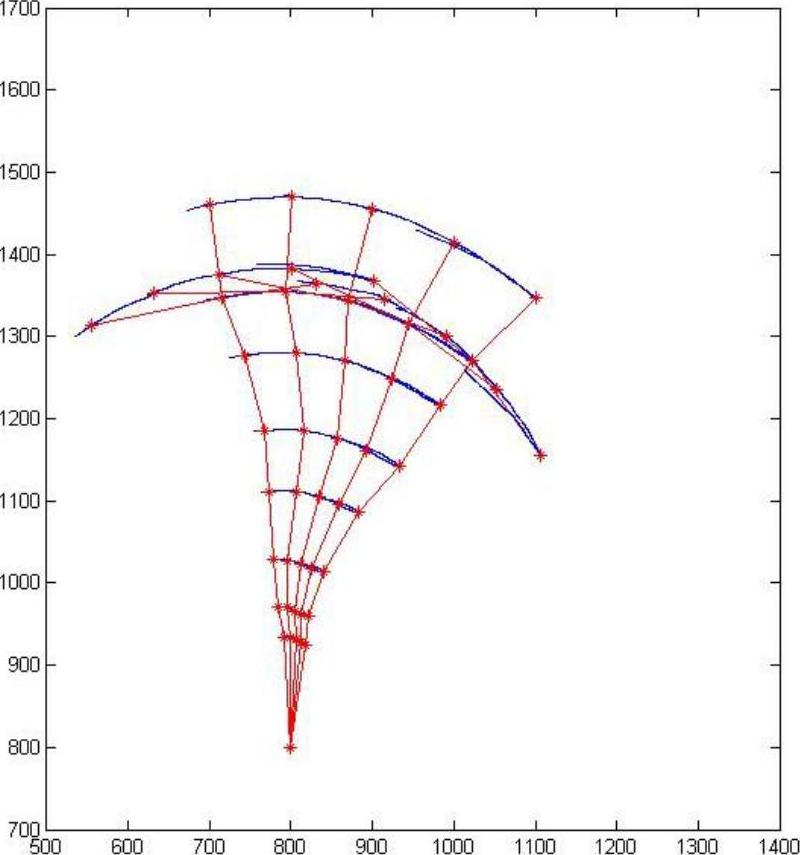
图9-11 站位体侧屈的轨迹图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。