



1.机械结构设计需求
“外骨骼”智能健身与康复机器人的机械结构设计过程中需要考虑并遵循以下要求:
1)保证整体机构的自由度设置能够满足与人体的贴合性,即各接触点、面机械一侧的运动轨迹能够通过控制各自由度的运动规律与人体相应各点的运动轨迹相重合。
2)坚决避免运动过程中与人体的干涉,防止出现意外。
3)应采取模块化的设计思路,简化机械的复杂程度,减少零件种类,同时增强机器不同部位间零件的可移植性,方便运输、装配与维修。
4)各模块的设计应在保证实现自身功能与经济性的前提下,尽量使用轻质高强的材料,选用强度较高同时容易加工的结构。满足机器运作时的强度需求,同时降低自身的质量,减少对后方串联驱动机构的载荷。
5)模块中的各功能件(如电动机、传动装置)布局合理,尽量紧凑缩小每个模块的体积。
6)各模块的动力输出轴系应具备多方向的承载能力,即可承载扭矩,又可承载弯矩,同时保证转动时输出平稳流程。
7)机构总体需要具备根据使用者身高不同而变换各机构尺寸的功能。此功能应具体体现在某一些模块中。
8)模块间的连接方式设计应牢固可靠,同时应容易拆卸,方便模块的维修与更换。
9)所选用的驱动器应不具备机械性的自锁功能(如螺纹传动副),同时应具备三环可控特性,即具备“位置”、“速度”和“力矩”的可控性。
2.控制与驱动系统设计需求
“外骨骼”智能健身与康复机器人的功能由健身和康复两大功能模块组成。针对两大功能,机器人控制系统既需要通过控制驱动元件提供阻力矩来达到健身运动的目的,也需要利用驱动元件提供主动力矩实现康复治疗和动作示教功能。控制系统将实现对22个驱动舵机的位置、速度的闭环控制,并可实现对舵机的力矩控制。使得力矩的输出符合人体运动工程学上的规律,从而可以精确拟合人体运动轨迹,实现健身运动时“角度”、“力度”的实时反馈功能和实现康复牵引功能和标准运动姿势教学功能。控制系统结构图如图9-4所示。
驱动系统是该机器人功能实现的重要组成部分,需要根据机器人功能要求,对驱动电动机进行选择,驱动电动机应满足如下要求:
1)电动机的体积应尽可能小,不应超过45mm×60mm×60mm。
2)电动机的输出扭矩应尽可能大,且不小于180N·cm。
3)电动机的转速应可调,最快转速应不小于7r/min。
4)电动机输出轴转动不必连续转整周,但至少可完成0°~180°的角位移转动。(https://www.xing528.com)
5)电动机拥有角位移、速度、力矩三环回馈功能。其中角位移回馈误差应小于等于5°,速度回馈误差应小于等于5%。
6)电动机的控制电路原理与程序的编写应尽可能简单。
7)电动机的布线应尽可能简单。
8)在保证上述性能指标的前提下,电动机应具有较高的性价比。
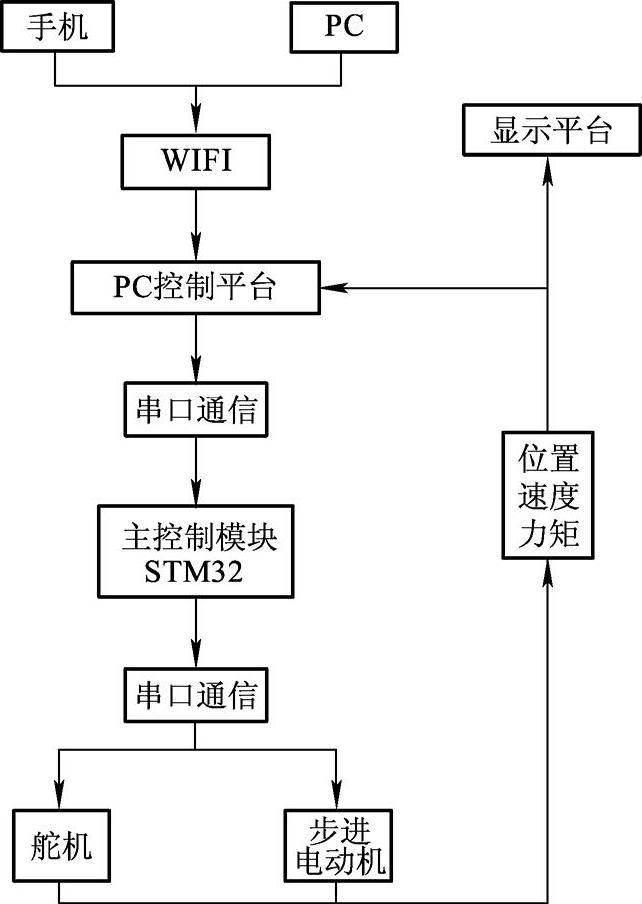
图9-4 控制系统结构图
3.智能化人机交互系统设计需求
“外骨骼”智能健身与康复机器人将配备形式丰富的控制终端和用户体验效果出色的人机交互功能。可以利用PC、平板电脑和手机等终端对机器人进行操控和与机器人进行互动,将在作品内置健身资料库,对使用者进行正确健身姿势的教学和纠正,并可以针对使用者身体状况量身制定出个性化的健身或康复计划。作品具备功能全面的控制拓展接口,上位机控制系统所具备的WIFI通信性能,实现与具备WIFI功能的电子设备的无线通信,通过安装有Android控制终端软件的移动设备终端完成对机器人的远程控制。同时,利用软件用户可以在手机等移动终端中建立私人健身档案,包括详细运动记录与卡路里消耗等关键健身数据的记录。用户可以在不同的机械上,使用同一部手机实现同样质量的“私人服务”。对移动终端的用户界面的设计将满足如下要求:
1)界面简洁明了,用户可以非常直观地了解机器人所具有的功能。
2)操作简单方便,使用者在系统简单提示后即可快速掌握操作方法。
3)动态效果展示,具有三维模型动态展示健身或康复动作,帮助用户快速熟悉将要完成的动作。
4.安全性考虑
由于机器人与人体直接接触,机器人安全性设计的重要性显而易见,首先需要考虑在使用机器人时可能出现的危险情况。
(1)机器带动人类肢体运动至“关节死区” 所谓“关节死区”是指在人体模型中将各关节简化为机械的运动副后,各关节无法在现实中旋转到的位置(如小腿相对与大腿无法向前弯曲,小臂相对于大臂无法向后弯曲)。而对于该健身康复器械中的转动副,若不加以特殊设计,其往往可以绕轴线自如转动,不存在转动角度上的死区。若在机械带动人肢体运动的模式下,如健身用户体力不支,瘫痪病人牵引治疗,或控制程序出现故障,一旦机械肢体将人体强迫得带动到“关节死区”,那么机械势必会对人体造成极其严重的伤害。
(2)人体穿戴器械时失稳跌倒 由于该健身康复作品自身的功能与结构特性,使得其具有相当可观的自身重量。保守估计,一套全身的完整设备的重量应该在100kg左右。若使用者在穿戴着器械进行锻炼或治疗时,一旦因为过于疲劳或动作不协调,导致重心失稳而跌倒,那么这样的后果将是灾难性的。因为在这种情况下,若人体夹在器械与地面之间,那么相当于整个器械的重量都会被加载在人体上。所以在进行设计时,一定要坚决避免这种危险情况。
(3)控制系统出现故障 此种危险情况的成因往往极为复杂,并且不可控。尽管此类故障出现频率较小,但是一旦出现,除对使用者的舒适感造成影响外,还可能造成前面提到的两种危险情况。因此此类故障的后果同样严重,必须通过机械或物理手段,防止在控制系统出现故障时对人体造成任何伤害。
(4)危险情况发生后器械依然在运作 一旦上述三种危险情况发生,由于机械的运动程序已经在使用前预设定好,所以尽管器械对使用者的伤害已经通过各机械手段避免,但是机器各运动副的继续工作依然有可能对使用者造成进一步的伤害。所以必须在适当的时刻,由使用者自行决定器械是否紧急停机。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。