



1.运动仿真
为了对千足虫宠物机器人进行运动仿真,首先对建立的模型进行分析。在八足形式下,千足虫宠物机器人共拥有4个体节,46个自由度。要使46个电动机按照预想的动作达到预定的角度,其间保持一致性并不是一件容易的事情。为了便于进行有序的控制,采用对每一个自由度进行编号的方法,如图8-32所示,将机器人按规律分成从0到7共八组,将各个直流角位移伺服电动机及脚部的直流有刷电动机按次序依次编号,使每一个电动机都有一个自己的ID,以便于仿真及后续的程序设计。
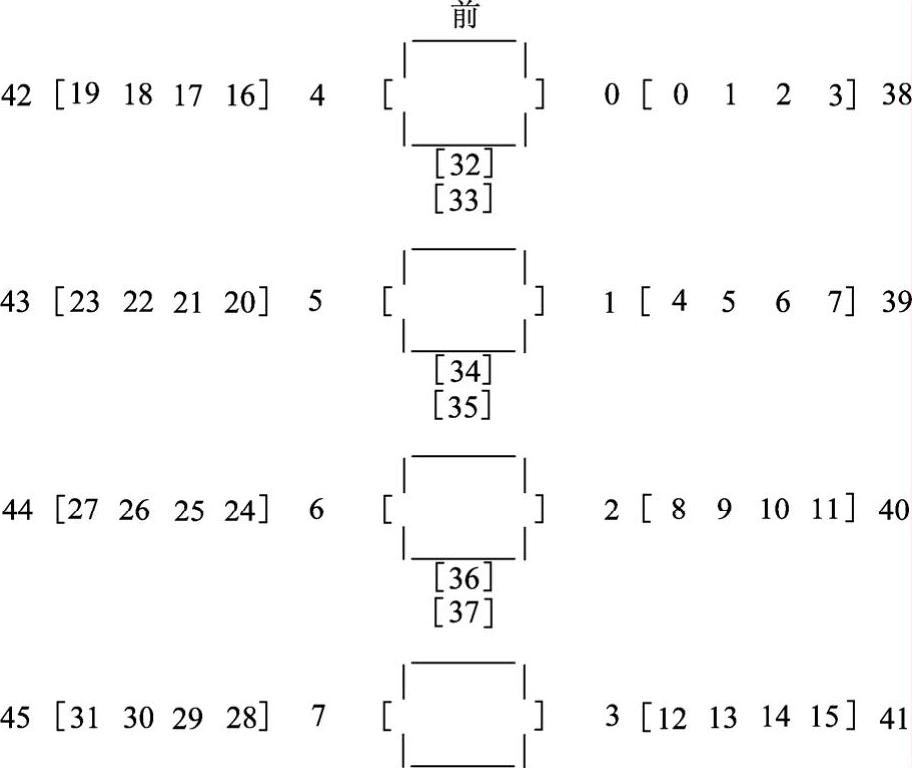
图8-32 各自由度编号
在完成编号之后,在Pro/E中按规定顺序依次为机器人的各自由度添加伺服电动机控制量,在腿部锥齿轮传动处添加齿轮连接约束,可得到运动仿真模型,如图8-33所示。
对于每一个伺服控制量,总的来说有三种伺服控制方式,分别是位置伺服、速度伺服和加速度伺服。针对所用电动机的不同,将直流角位移伺服电动机选为位置伺服控制,通过建立各时刻不同位置处舵机的角位移数据表,对其进行运动仿真。在其运动过程中,对表中的数据进行线性插值,便能在Pro/E中输出千足虫宠物机器人的仿真结果。对于脚部的直流有刷电动机,选用速度伺服控制方式,通过设定不同时刻直流有刷电动机的运动速度,对其进行控制。
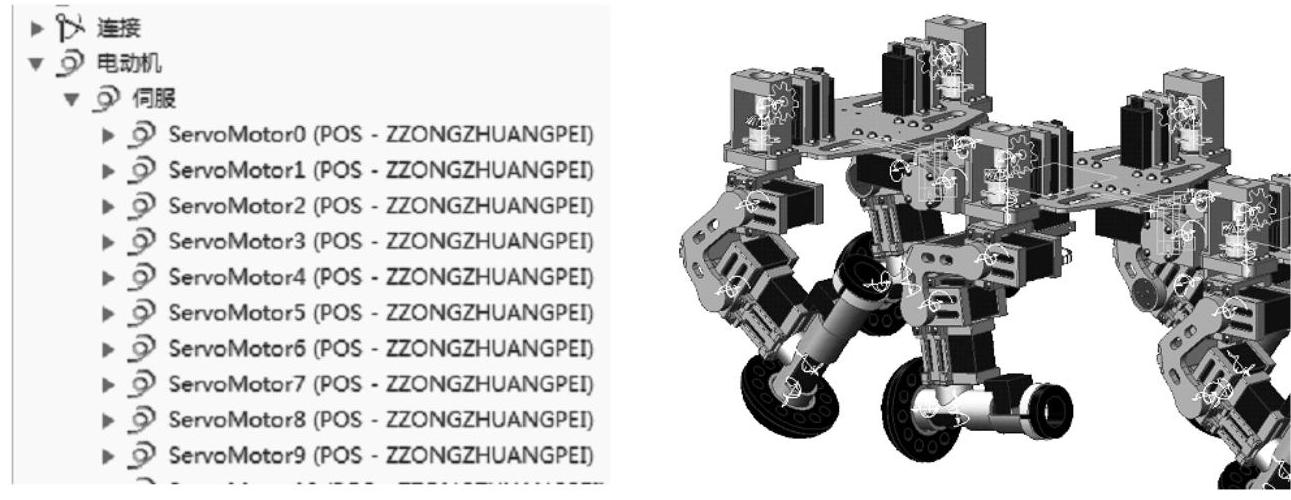
图8-33 在Pro/E中的运动仿真模型
在进行仿真的过程中发现左右两腿舵机,以及同一条腿上上下两个关节的舵机顺时针或逆时针旋转的不同会使关节转动角度增加或减小。为了更为清晰地掌握各关节转动方向对其当前角度的影响,先画出如图8-34所示的各关节角度数值分布图。
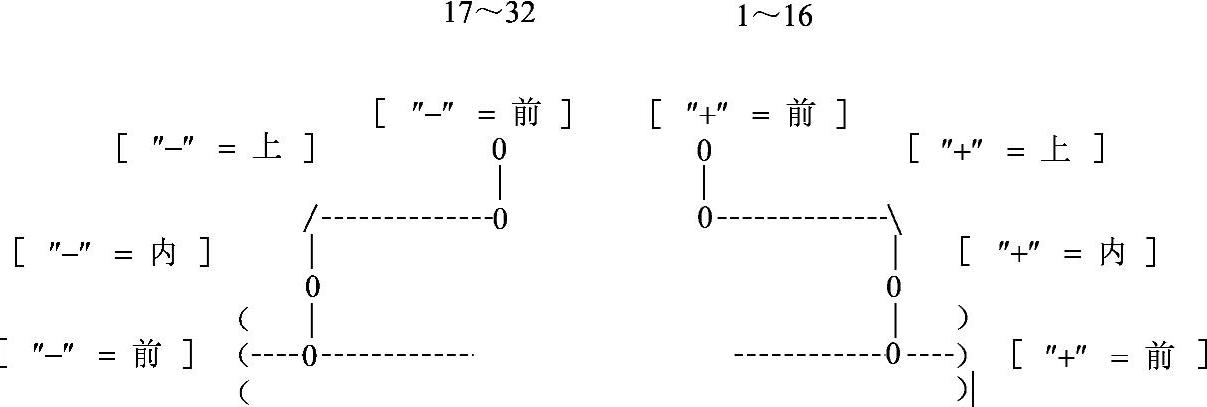
图8-34 各关节角度数值分布图
2.步态规划
针对千足虫宠物机器人的机械结构,首先从单体节入手,研究机器人能够摆出的造型。再充分结合自然界中各种生物的运动方式及合理的想象,设计出了十几种的单腿姿势。图8-35所示为四种典型的单腿姿势。
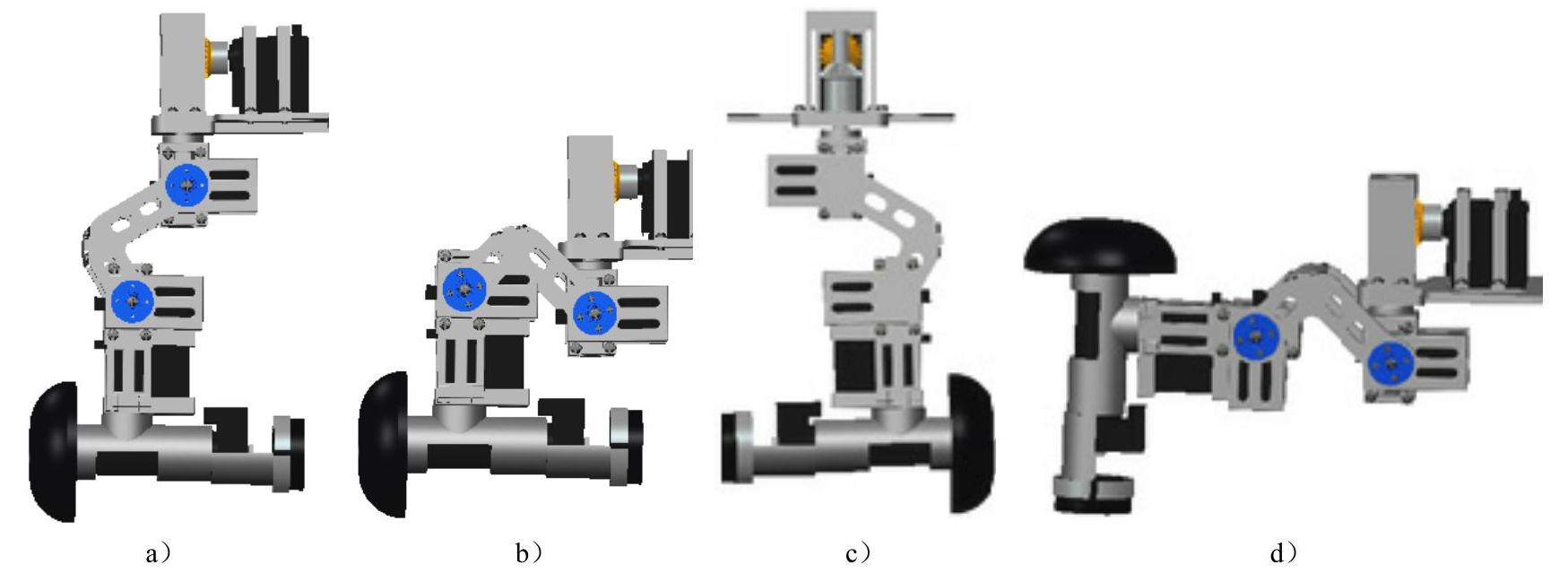
图8-35 四种典型的单腿姿势
a)站立式 b)屈曲式 c)侧立式 d)昆虫式
在得到如上各种腿部姿态后,记录下上述姿势时腿部各舵机当前的数值,作为步态设计时的初始数据。不同腿部姿势对应的舵机数值示意图如图8-36所示。
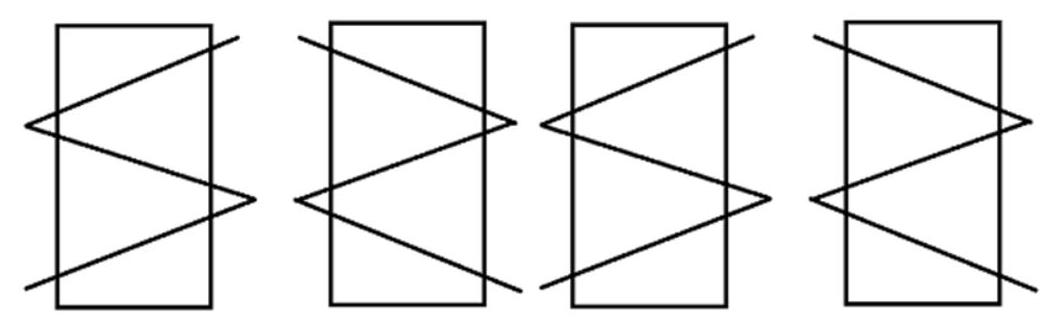
图8-36 不同腿部姿势对应的舵机数值示意图
简单来说,行走步态就是相同的几个关键帧的重复出现。一般关键帧的数量为4,因此只需要找到这些关键帧便能构造出一个步态。经过多次实验,在Pro/E中得到了多种步态数据,并以一定的数据格式记录在Excel文件中。利用MATLAB将各个电动机的数据分别导成以时间为横坐标的控制量变化文件,并将其输入到各个电动机的控制项中,使46个电动机按照预定的规律进行动作,便可在Pro/E中看到仿真动画。但得到仿真动画并不是最终目标,还需要对得到的仿真数据的真实性和可靠性进行验证,才能将其真正地用于实际样机的调试过程中。以腿式行走为例进行说明。
对于腿式行走,选用三角步态作为千足虫宠物机器人的行走方式。其大致运动过程如下:
1)机器人8足同时着地,做姿态调整,准备开始运动。
2)机器人1,3,5,7号腿抬起,0,2,4,6号腿保持着地动作。(https://www.xing528.com)
3)机器人1,3,5,7号腿着地,0,2,4,6号腿同时抬起。
4)重复2)、3)步的动作,使机器宠物一直向前走。
通过运动仿真,证实了千足虫宠物机器人在运动过程中各个构件间不存在运动干涉,机身保持平稳前进,行走顺畅,各足无滑移现象发生。
在Pro/E中还得到了各个伺服电动机控制量的变化曲线。图8-37所示为在进行腿式行走过程中,0号舵机的运动位移、速度和加速度曲线。在考虑到直线插补的影响后,可以看出在机器人运动的过程中,0号舵机的角度、角速度及角加速度的变化曲线都较为平滑,没有出现较大的跃迁现象,只是在支撑相与摆动相交替时刻,该关节处的角加速度波动较大,但幅度在可以接受的范围内,仍能够使千足虫宠物机器人平稳运行。
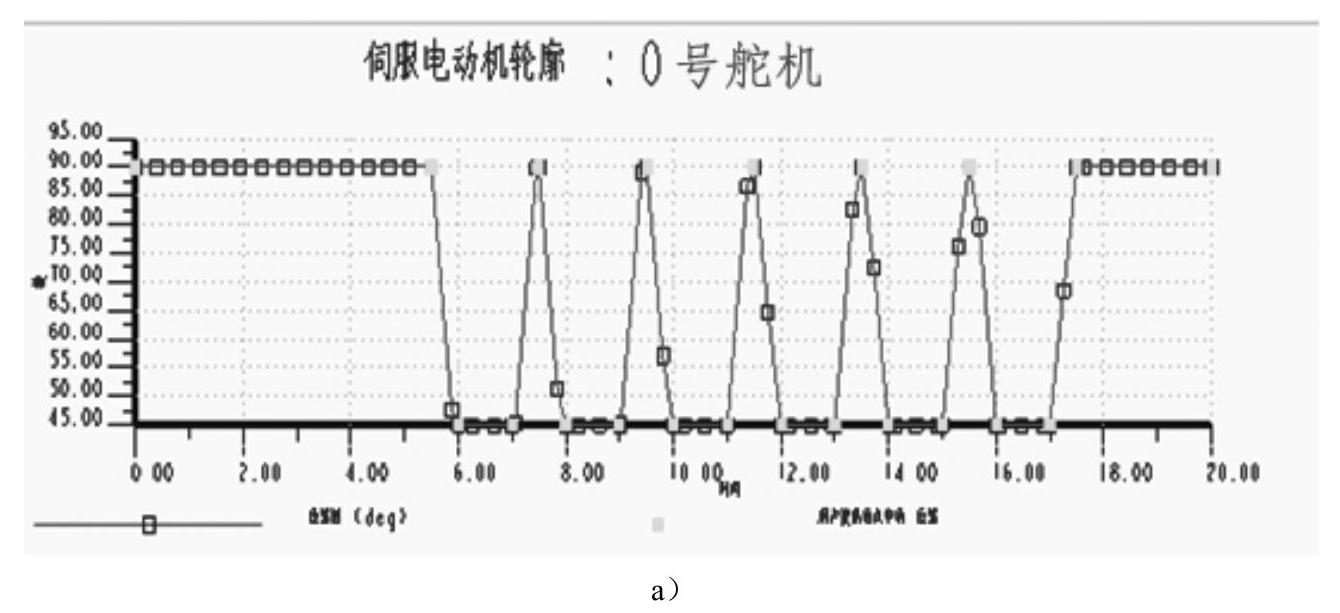
图8-37 0号舵机的运动位移、速度和加速度曲线
a)角位移变化曲线
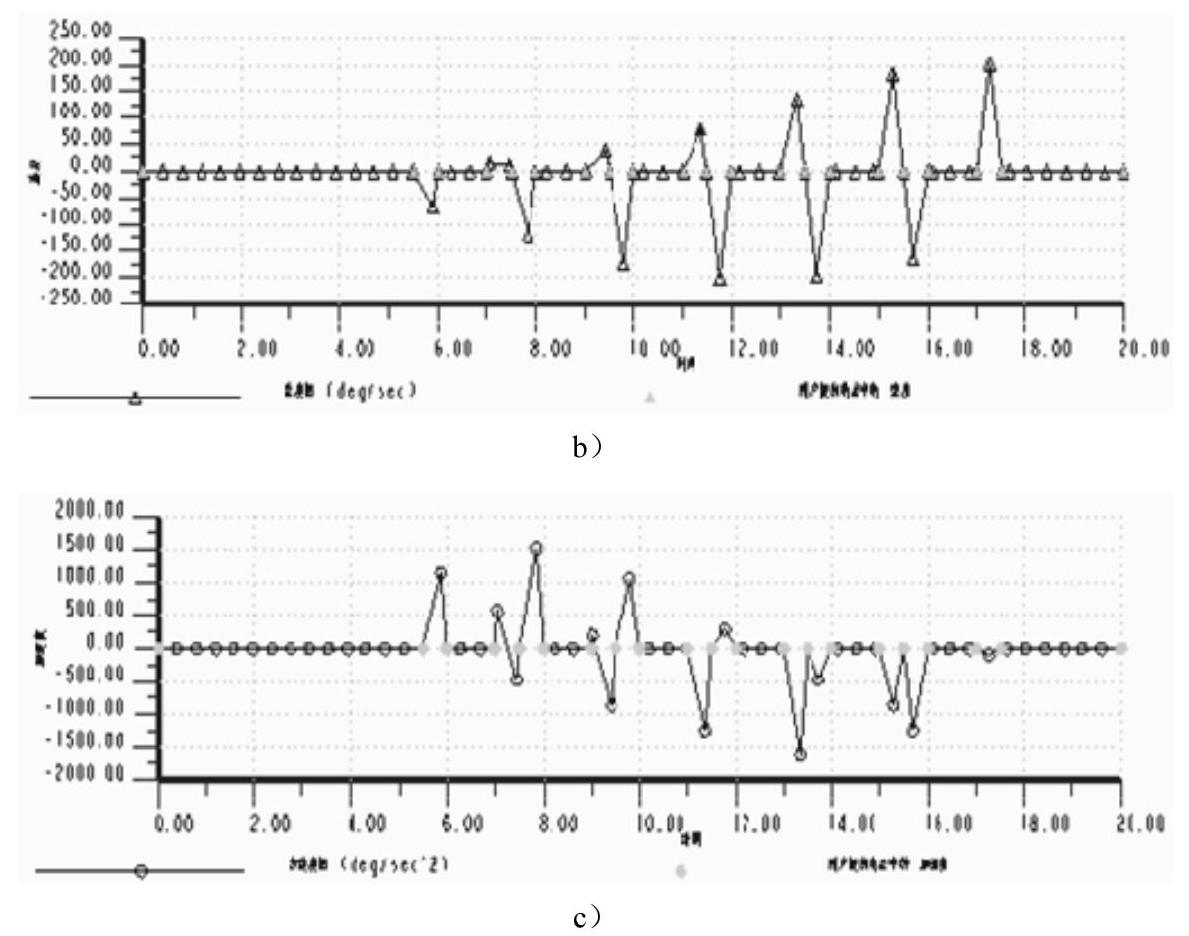
图8-37 0号舵机的运动位移、速度和加速度曲线(续)
b)角速度变化曲线 c)角加速度变化曲线
下面分析提供速度伺服的脚部直流电动机的情况。图8-38所示为在原地回转步态中,38号脚部直流电动机的角位移及角速度随时间变化的曲线。可以看出,曲线变化平稳,运动符合直流电动机的变化规律,满足运动要求。
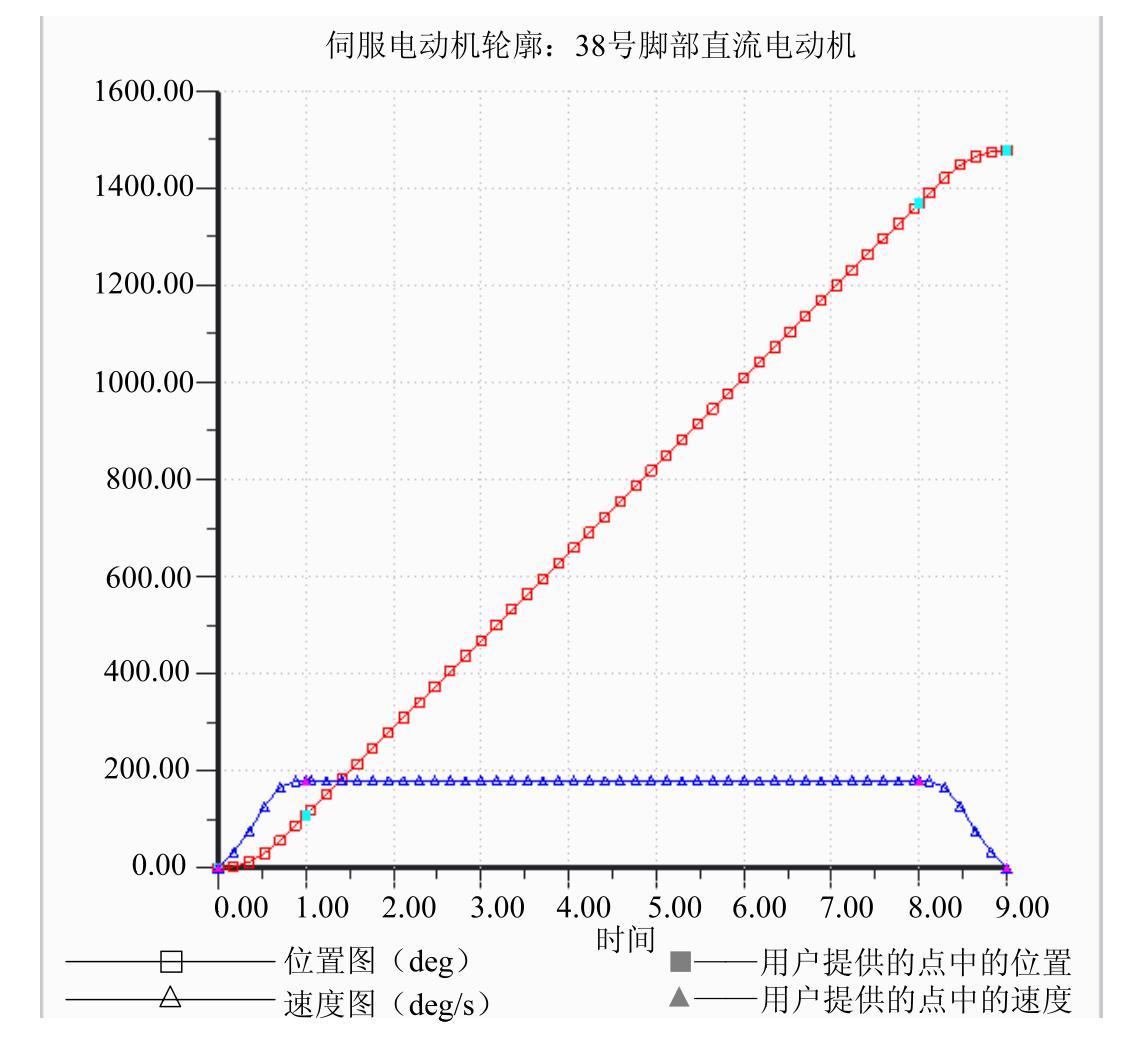
图8-38 38号脚部直流电动机的角位移及角速度随时间变化的曲线
得到各运动动作的步态数据之后,可以将其应用在以下两个方面:
1)将得到的各关节运动曲线直接导入到3D MAX中的轨迹视图-曲线编辑器中,变成3D模型的关节运动曲线,从而可得到更高质量的3D动画。3D模型的关节运动曲线如图8-39所示,部分3D Max动画截屏如图8-40所示。
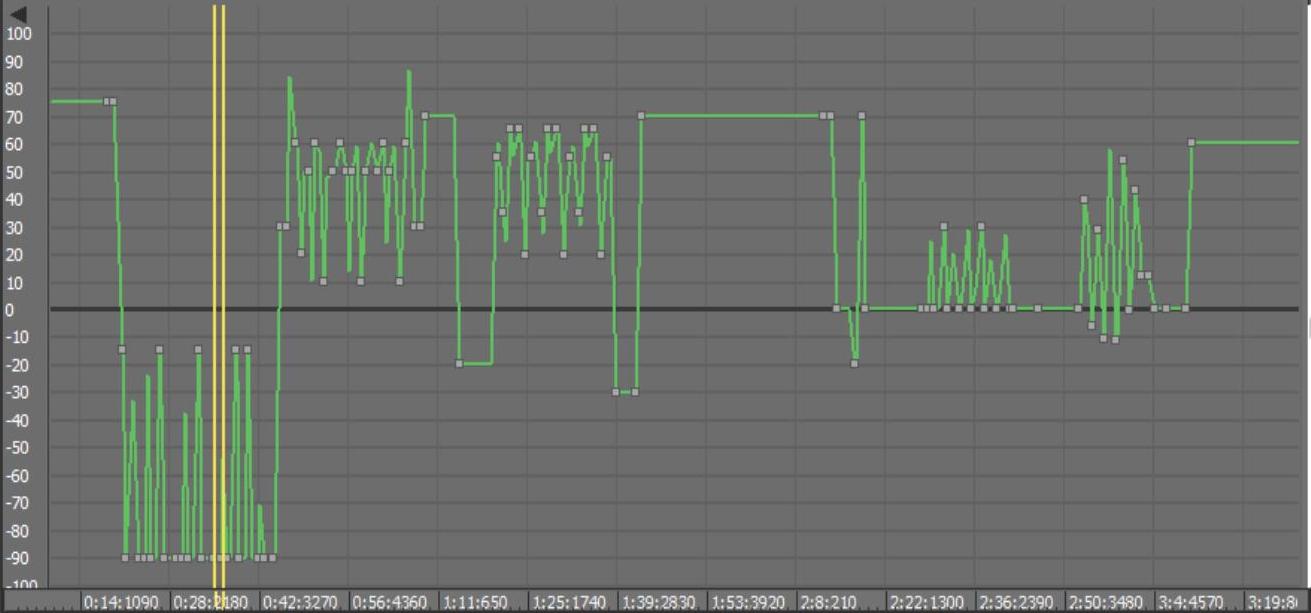
图8-39 3D模型的关节运动曲线
2)将得到的步态数据的具体数值存在excel文件中,作为后期步态函数编写的数据来源。还可以将数据稍作变换,便用在程序之中,简化程序的设计过程。
通过虚拟现实中的运动仿真模拟及步态设计,得到了几十种步态的步态数据,充分说明了千足虫宠物机器人高自由度下运动的复杂程度。其机械结构能够保证在如此多的步态下运动不发生干涉,并且能够较好地完成,充分说明了结构设计的精妙程度。运动仿真为实物样机奠定了坚实的理论基础,为千足虫宠物机器人完成真实运动做好了铺垫。
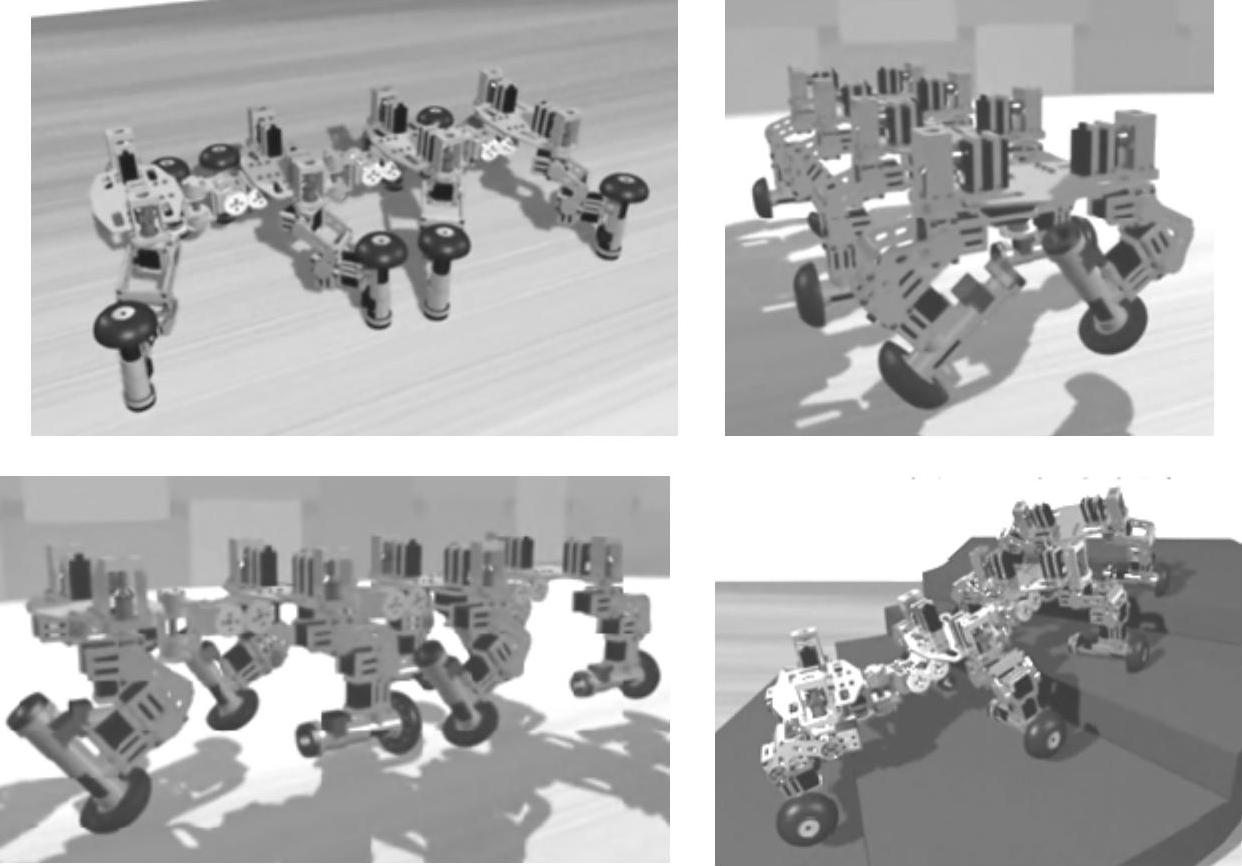
图8-40 3D Max动画截屏
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。