



1.机械结构总体设计框图
千足虫宠物机器人的机械结构采用模块化思想进行设计,整体结构包含4个模块,每个模块主要由三个部分组成:轮腿式运动足、腰部链节结构和模块化连接板。机械结构的总体设计框图如图8-1所示。
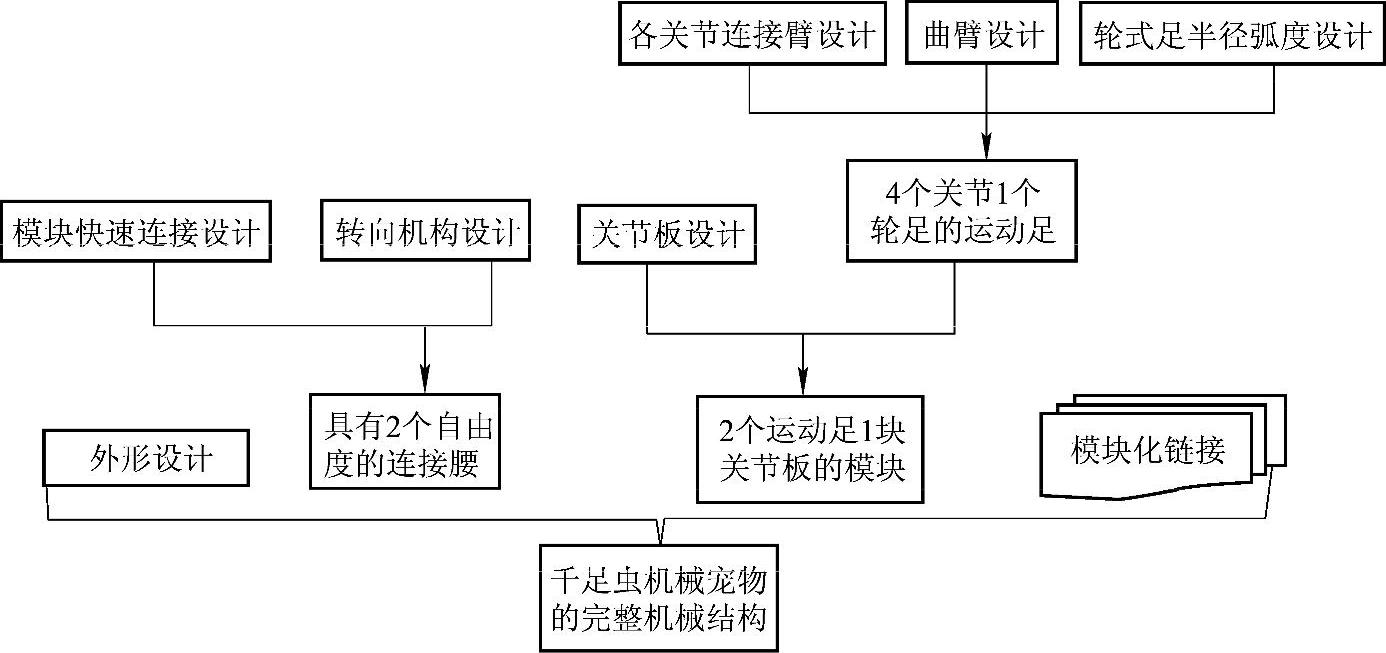
图8-1 机械结构的总体设计框图
2.轮腿式运动足的设计
腿部是千足虫宠物机器人运动的关键环节,是多种步态得以实现的基础。为了让千足虫宠物机器人运动地更灵活,实现多种行走方式,首先对其腿部进行结构设计。
(1)腿部设计目标
1)运动灵活,能够适应多种地形,可以在以髋关节为中心的φ120球面与φ150球面之间的任意区域落地。
2)结构紧凑,空间利用率高,便于实现机器人的小型化、娱乐化。单腿占用空间<150mm×240mm×80mm,单腿质量<1kg。
3)强度及动力足够,保证正常行走时不会出现强度问题,对于突发情况有一定耐受力。
4)运动时前后两体节、两腿之间及腿与板之间不发生运动干涉。
(2)设计方案 就目前已有的各种仿生机器人运动足的设计而言,腿式机器人具有地形适应性强的优点,但存在运动速度慢、机体平衡控制困难等不足;轮式机器人运动速度快,但跨越障碍、适应不同地形和机身灵活运动的能力稍有欠缺。
结合设计目标和以上分析,提出以下设计方案:在保留机器人本身的轮式运动的同时,结合生物腿式运动的特点,设计一款既具有轮式的运动速度快又具有腿式的地形适应性强特点的千足虫宠物机器人,即腿部的结构形式采用轮腿复合式设计方案。
(3)腿部整体结构 千足虫宠物机器人的腿部整体结构如图8-2所示。腿部由4个转动关节、1个作为足部的直流电动机和具有特定角度的曲臂结构组成。每条腿具有5个自由度,分别由4个直流角位移伺服电动机和1个直流电动机驱动实现。通过对电动机的精确控制可使机器人逼真、流畅地展现各种预设步态。
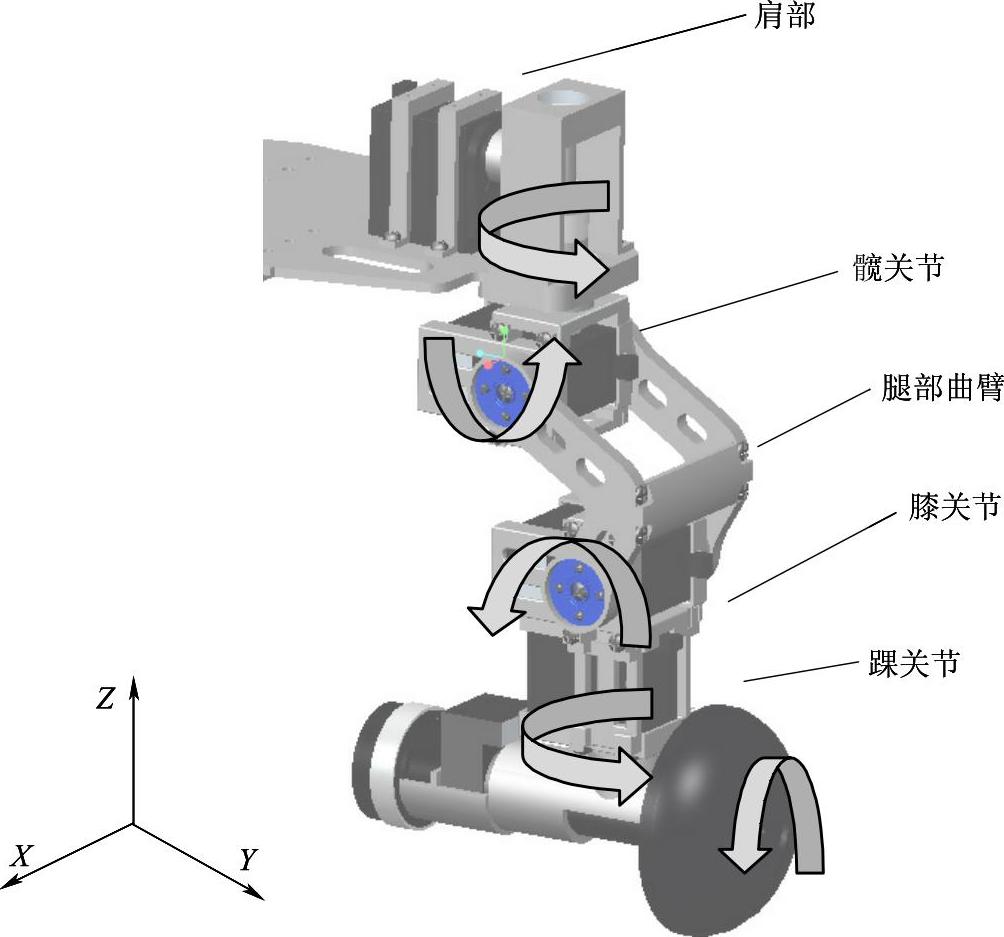
图8-2 腿部整体结构图
4个腿部转动关节可实现180°大范围的转动,用来改变腿部运动结构,实现各种造型。足部的直流有刷电动机用来驱动负载小轮,可以使机体以轮式滚动的方式快速移动。
以千足虫宠物机器人整体向前方向为X轴,侧向为Y轴,竖直方向为Z轴,建立如图8-2所示的空间直角坐标系。千足虫宠物机器人的具体运动方式可描述为:
1)肩部电动机Y轴方向的转动通过锥齿轮转化为Z轴方向的转动,带动整条腿绕Z轴方向旋转。
2)髋关节上电动机X轴方向的转动通过曲臂结构带动腿部上下运动。
3)膝关节上电动机X轴方向的转动带动足部实现YZ平面上的转动。
4)踝关节上电动机Z轴方向的转动带动足部实现XY水平面上的转动。
5)足部的直流电动机Y轴方向的转动带动轮子实现轮式滚动。
(4)具体介绍
1)肩部。千足虫宠物机器人的肩部设计如图8-3所示。采用辉盛MG995直流角位移伺服电动机提供动力,通过两个模数为1,齿数为20的锥齿轮,传动比为1,将电动机Y轴方向的转动转化为Z轴方向的转动。由腿轴带动整条腿进行绕Z轴的转动,转角范围为-90°~90°。
腿轴由上部齿轮箱上的轴承与板上轴承进行固定,其上齿轮通过键进行固定。腿轴与腿部通过型面联接进行周向固定,通过螺母进行轴向固定。腿轴分解图如图8-4所示。
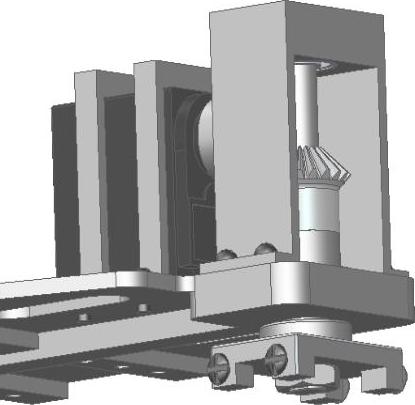
图8-3 肩部示意图
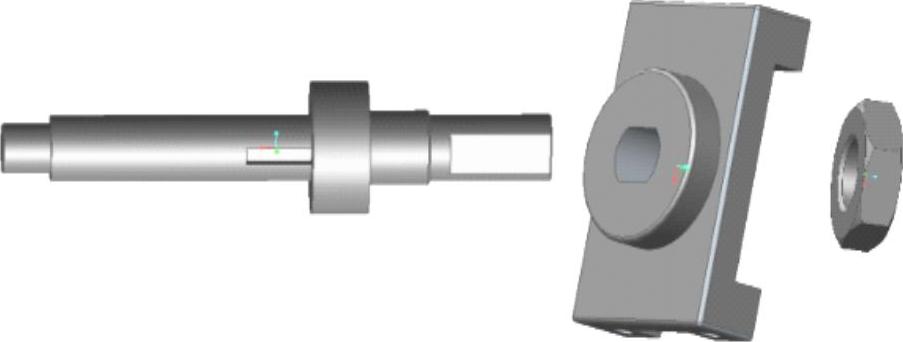
图8-4 腿轴分解图
2)髋关节。髋关节主要用于实现整条腿在YZ平面内的转动,考虑干涉情况后,将其转角范围确定为15°~165°。
根据该关节所受最大力矩,选用XQ—S4230D直流角位移伺服电动机作为动力单元,该电动机的外形尺寸为40.2mm×20.1mm×38.8mm。对伺服电动机采用包围结构,根据伺服电动机的尺寸来确定包围结构外壳的尺寸,并通过精细的测量来确定背板上和伺服电动机对称位置安装轴的位置,从而保证对称性。此外,在设计时,两侧预留出了0.1mm的安装间隙以方便调整。图8-5为髋关节的结构分解图。
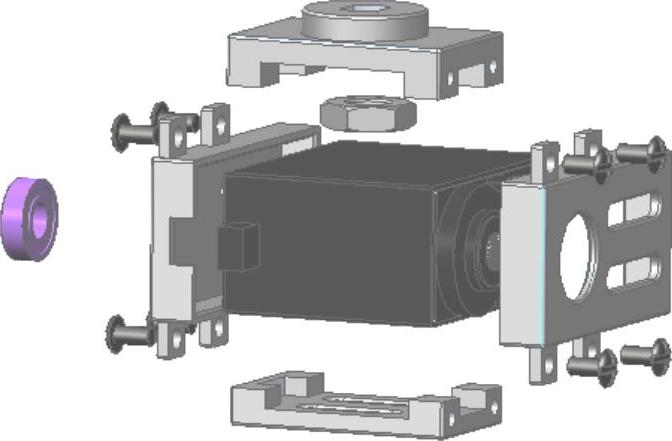
图8-5 髋关节的结构分解图
3)腿部曲臂。为了使腿部关节有更大的活动范围,需要对连接件进行一定的设计,使运动干涉情况最少。通过对运动足动作的设计要求进行分析可知,曲臂应由两部分组成,并且要求前部长度>32mm,后部长度>50mm,两轴之间的距离>60mm。通过调整尺寸,确定拐角为90°,前部长度为35mm,后部长度为52mm。
曲臂尺寸几何关系如图8-6所示。设前部长度为a,后部长度为b,两轴距离为c,由勾股定理可得,c=62.3>60,因此设计合理。
所设计的曲臂结构如图8-7所示。
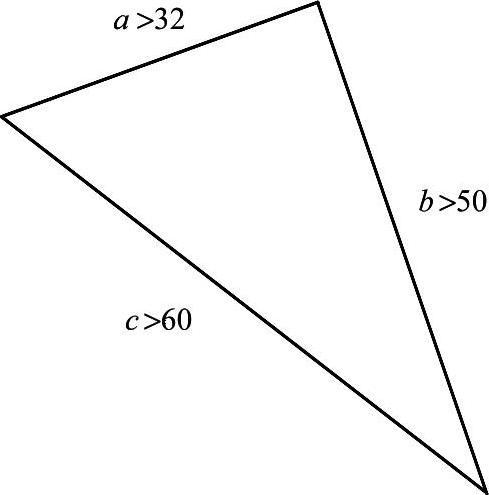
图8-6 曲臂尺寸几何关系图
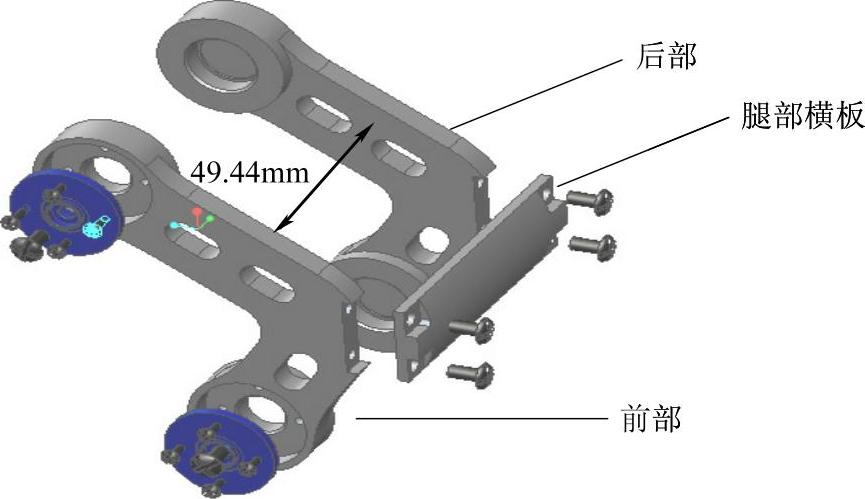
图8-7 曲臂结构
两曲臂之间的设计间距为49.44mm,通过一块横板将两曲臂连接为一整体,使其共同运动,带动下部结构。
4)膝关节与踝关节。为了节省空间,将膝关节与踝关节设计为一个整体,上部分与曲臂进行连接,带动下部及足部在YZ平面进行旋转,考虑干涉问题,将膝关节的转角范围确定为15°~165°。与髋关节共同作用,使得机器人足部的可达范围更加宽广。
下部踝关节主要带动足部绕Z轴进行旋转,转动范围为−90°~90°,可以使足部向前或向后运动,实现更多步态。
两部分依旧采用包围舵机的结构,如图8-8和图8-9所示。通过三层板叠加固定,并共用一块分隔板,以减少重量。
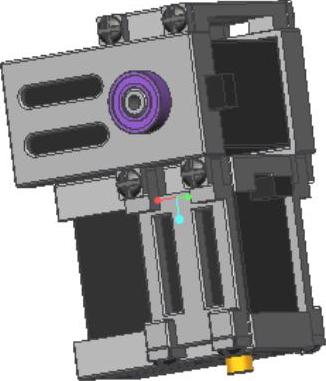
图8-8 舵机包围结构图
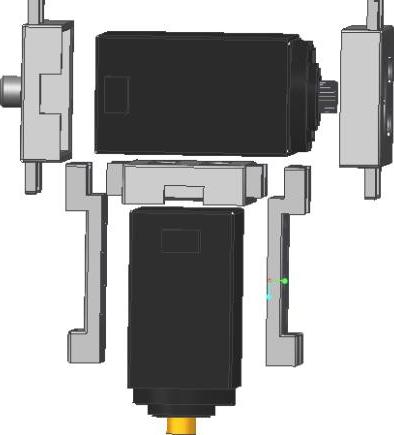
图8-9 舵机包围侧视图
5)足部。千足虫宠物机器人的足部是其运动的基础,是其轮式行走及腿式行走的着地点。依据MAXON直流电动机的形状,采用包覆式的形式设计出长柱型的足部,如图8-10所示。以直流电动机作为足部的主体,前端装有轮子,可实现轮式行走,后端在腿式行走时可以作为足部。
关于轮子形状的设计,由于足部需要绕图8-11所示圆心进行旋转,为了使千足虫宠物机器人平稳接触地面,需要保证轮子曲线与图示大圆相切,这样才能保证转动平稳。该大圆的圆心即为曲臂与膝关节的连接处,直径为111mm。轮子曲线与这个圆相切,然后以圆弧向中心过渡。此外,由于大多数时间轮子如图8-11所示状态进行转动,为了增大其与地面的接触面积,设置了一道截面宽度为4.66mm的平面,可避免轮子因压强太大而损坏。
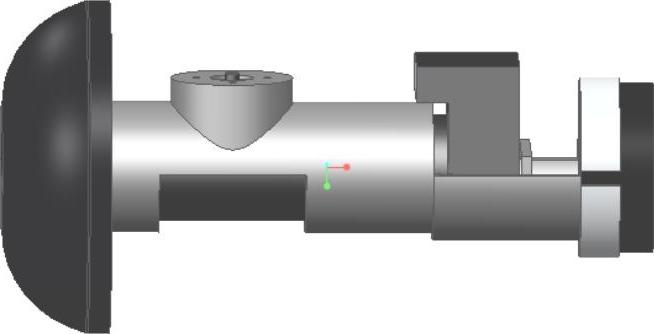
图8-10 足部设计图
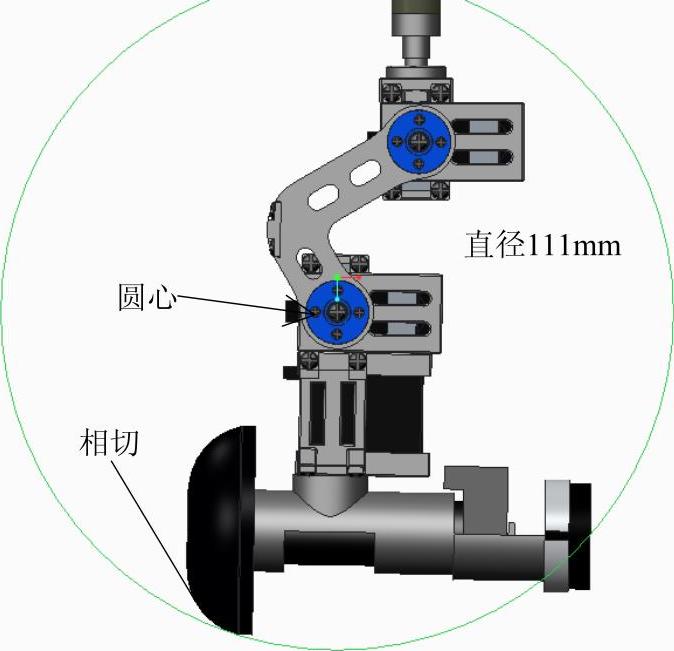
图8-11 运动足圆域图
由于轮子最宽处的直径为69mm,周长为216.66mm,选用的直流电动机在24V的电压下转速为550r/min,千足虫宠物机器人的巡航速度可达2m/s。
图8-12所示为轮足分解图。在轮子的固定方式上,首先将轮子固定在轮芯上,通过长方形的键进行周向固定,通过螺钉进行轴向固定,然后将轮芯通过D形孔固定在电动机延伸套上,最后将电动机延伸套通过轴承进行轴向及周向固定,使得轮子不容易脱落掉出。
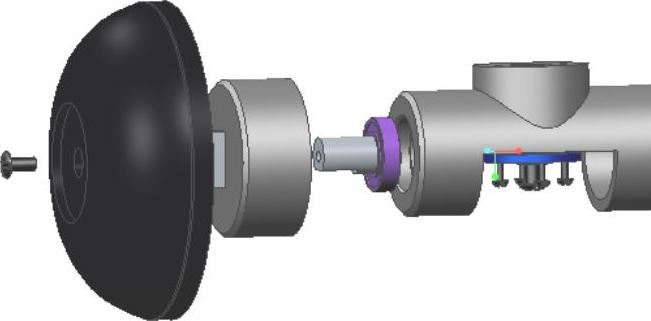
图8-12 轮足分解图
对于直流电动机和轮足后部橡胶脚垫的固定,直流电动机通过螺钉固定在脚部外壳上,后部通过插板进一步限制其轴向运动,分担一部分步行姿态造成的冲击力;脚后部的橡胶脚垫通过卡箍固定在足部外壳上,起到缓冲作用,避免冲击过大,损坏机器人。
3.腰部链节结构设计
(1)腰部设计目标 腰部机构应具有多个自由度,以使千足虫宠物机器人具有多样化的步态,姿势更加生动灵活,具有更加接近于真实动物的运动特点。
腰部结构以舵机作为原动机,带动相邻两体节作左右及上下方向转动,其中左右方向的转动范围不小于−30°~+30°,上下方向的转动范围不小于−30°~+45°。
在完成部分预设姿势时,单一体节造成的重量和力矩需要全部由上下方向转动组件承担。根据目前设计的腿部、身板自重估算,上下转动方向转动组件承受的重力大于20N,扭矩大于3N·m。
左右方向转动组件在千足虫宠物机器人水平运动过程中起辅助作用,具体需要的扭矩很大程度上受腿部动作的影响。在完成特定动作时,会受到单个甚至多个体节造成的重量和力矩,若以2节体节计算,在极限姿态下,组件承受的重力大于40N,扭矩大于3N·m。
(2)腰部结构设计 根据设计要求,腰部结构分为两大部分:左右方向转动组件和上下方向转动组件。左右方向转动组件通过其中的腰左右方向连接件与后一体节相连;上下方向转动组件通过其中的腰上下方向连接件与前一体节相连;两体节之间通过上下方向腰椎和左右方向腰椎相连,形成类似十字节的结构。两组件分开有利于设计过程中前后两体节相对位置的调整,也有利于简化工艺。在考虑腰部结构的大小时,参考了强度要求。
由于舵机本身材料强度所限,以上两组件的重量由其他机构承担。舵机仅提供所需力矩。综合考虑功率、输出力矩、响应时间、转动角度范围和价格等因素,选择的舵机型号见表8-1。
表8-1 腰部舵机型号

腰部总体结构如图8-13所示。腰部左右方向转动组件和上下方向转动组件的结构如图8-14所示。腰部所包含的零件见表8-2。(https://www.xing528.com)
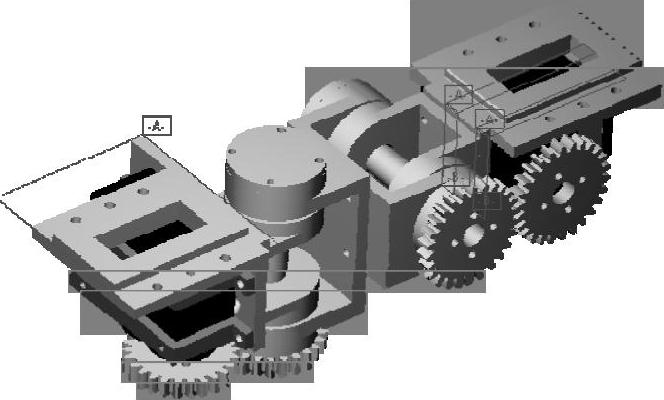
图8-13 腰部总体结构
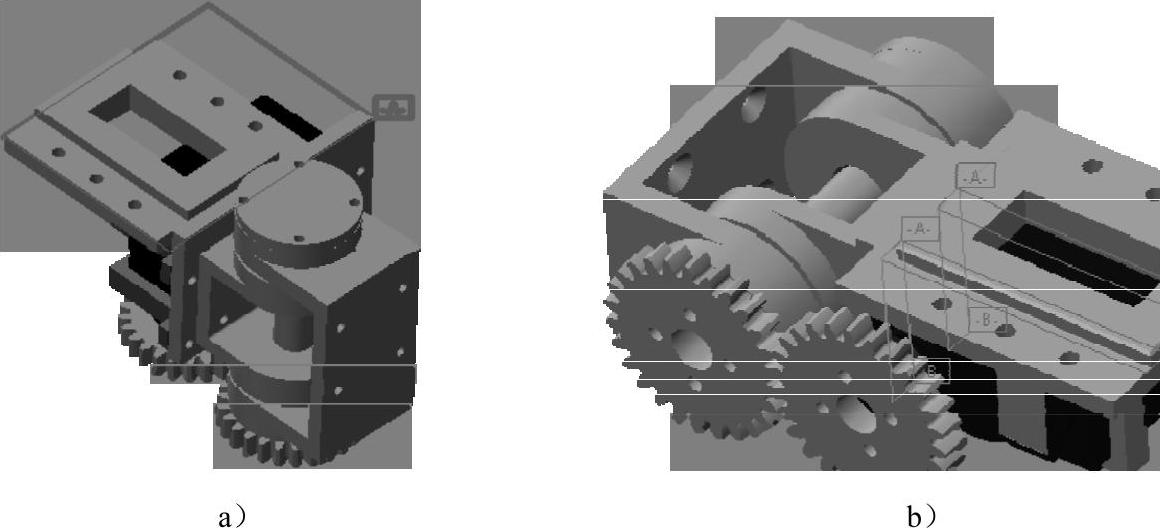
图8-14 腰部左右方向转动组件与上下方向转动组件结构图
a)左右转动组件 b)上下转动组件
表8-2 腰部零件
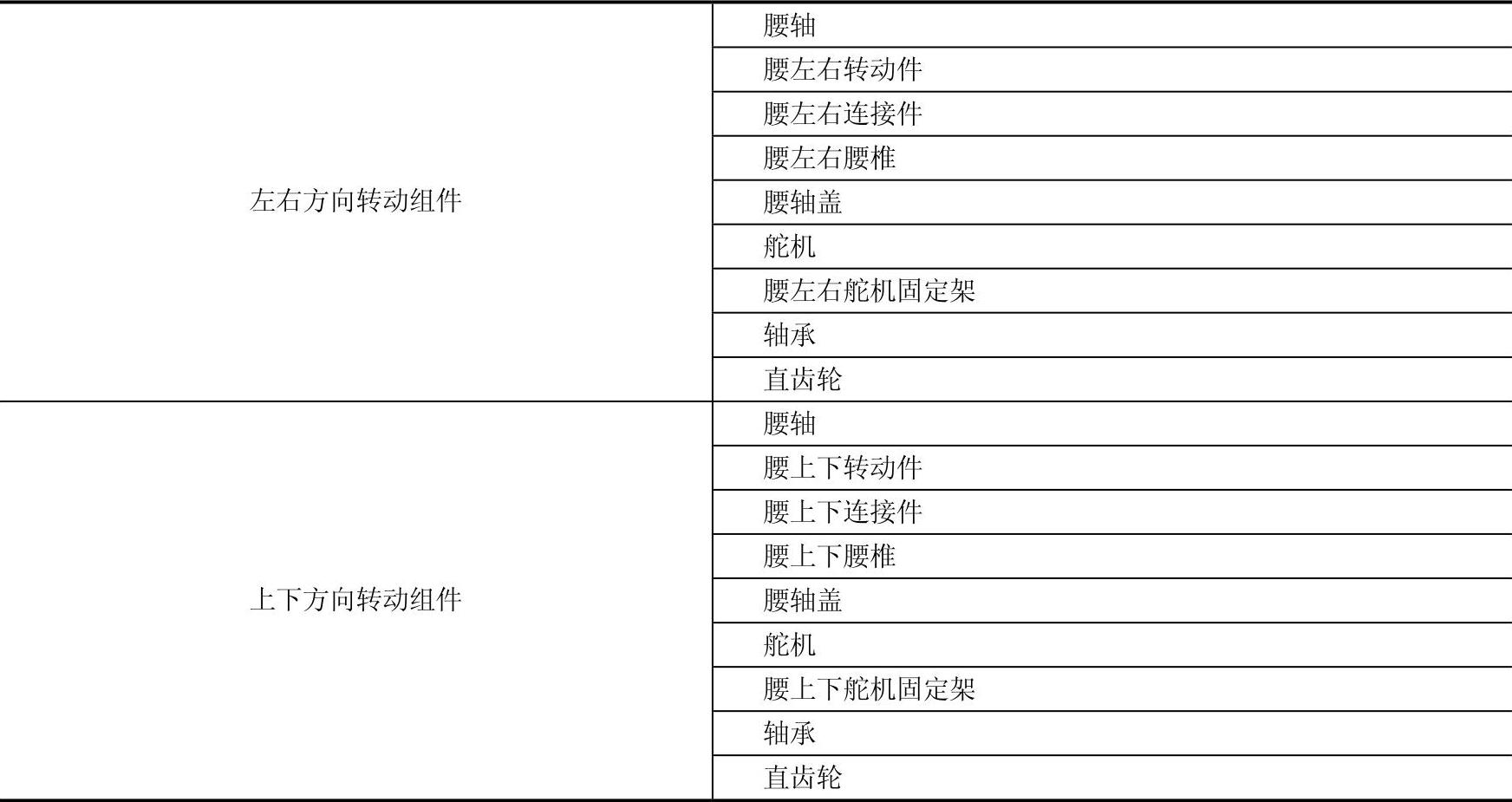
(3)腰部轴系的设计 由于腰部左右方向转动组件与上下方向转动组件结构相近,为了提高系统的重复利用率,两组件使用相同的腰轴、轴承、轴承盖、齿轮,相应地,腰上下转动件与腰左右转动件、上下方向腰椎与左右方向腰椎在轴向尺寸上完全一致。
腰椎结构如图8-15所示。受力分析如下:
为确保零件结构强度满足要求,在Creo Simulate 1.0中对零件进行了受力分析。千足虫宠物机器人动作多样,为了便于受力分析,对其进行了一定的简化,作如下假设:千足虫宠物机器人处于静态、单体节悬空状态,并且单体节所受重力全部由腰部承担。
通过分析、计算及实物测量,在未加电路、装饰物的情况下,得到的单体节的质量为1.8kg。为保证在安装好附加物之后的强度,留一定余量,假设单体节所受重力为20N。以下为各个零件的受力分析条件及结果。
1)腰上下转动件。零件受力情况如图8-16所示。箭头代表体节对其施加的压力,总和为20N,假设力均匀分布。零件材质为铝。受力结果分析图如图8-17所示。
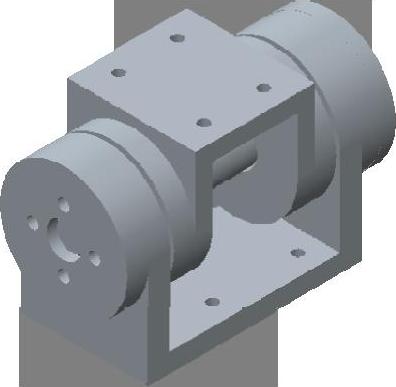
图8-15 腰椎结构示意图
图8-16 腰上下转动件的受力情况
铝的屈服强度为15~20MPa,由图8-17可以看出,除螺纹孔极小区域压强约为19MPa外,其余地方都远小于铝的屈服强度,因此腰上下转动件的强度符合设计要求。
由于零件受力情况复杂,下面从另一个方向研究其受力情况,如图8-18所示。同样,箭头代表体节对其施加的压力,总和为20N,并假设力的分布均匀。图中还标记出了与相邻零件固定用孔,这里将其设定为固定面。零件材质为铝。
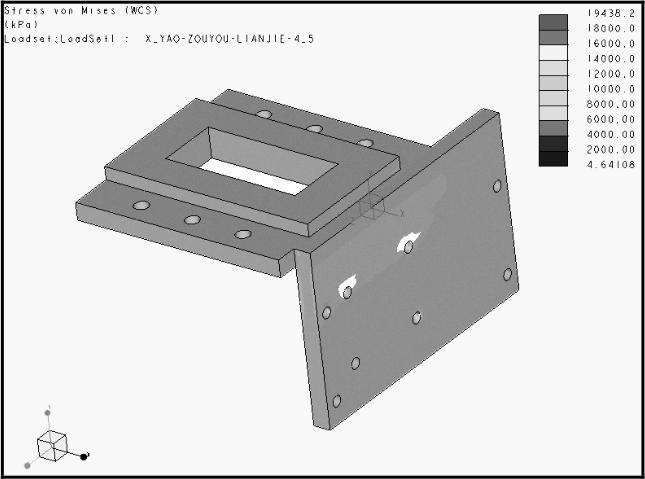
图8-17 腰上下转动件受力结果分析图
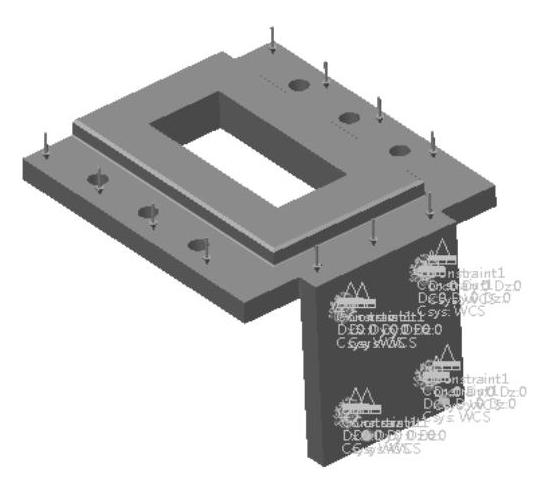
图8-18 腰上下转动件二次受力示意图
腰上下转动件二次受力结果分析图如图8-19所示。从图8-19可以看出,只有固定用孔处出现了较小的峰值,其他地方均满足强度要求。
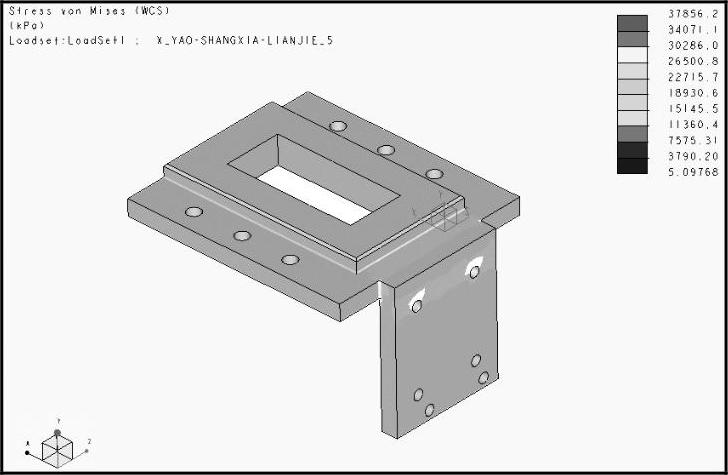
图8-19 腰上下转动件二次受力结果分析图
2)腰左右转动件及腰轴。此组件中,腰左右转动件材料为铝,腰轴材料为Fe40。受力分析结果分别如图8-20和图8-21所示。所施加的力分为两组,上边一组大小为28.3N,下边一组大小为20N。图上所示的4个孔为与相邻零件固定用孔,这里将其设定为固定面。从图中可以看出,左右转动件及腰轴均满足强度要求。
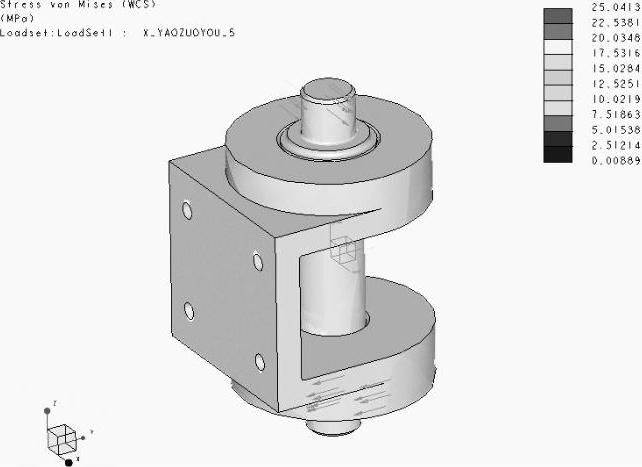
图8-20 腰左右转动件受力结果分析图

图8-21 腰轴受力结果分析图
3)腰椎。腰椎分为两部分,分别连接上下转动部分和左右转动部分。两部分通过螺钉相连。假设左右方向转动的部分在水平方向固定,上下方向转动的部分受向下的力,大小为20N,受力示意图如图8-22所示。受力结果分析图如图8-23所示。从图中可以看出腰椎的强度符合要求。
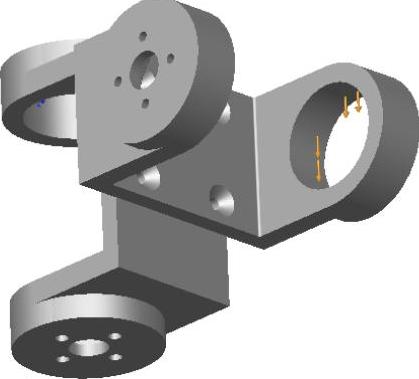
图8-22 腰椎受力示意图
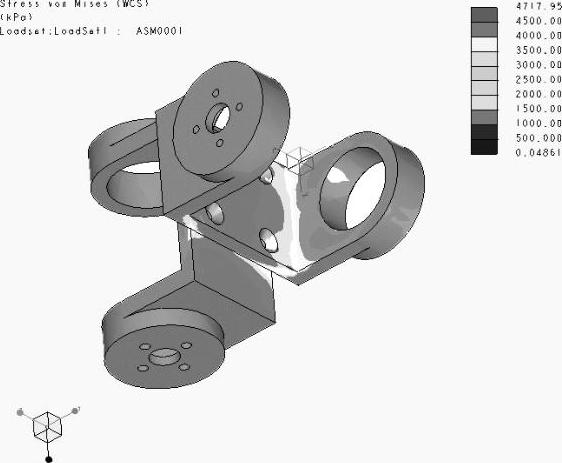
图8-23 腰椎受力结果分析图
4.模块化连接板的设计
连接板是千足虫宠物机器人腿部与腰部的连接器件,它的强度、设计方式和形状等影响着千足虫宠物机器人的整体情况。因此,需要尽量减轻重量,保证强度,使整体达到最佳。
(1)连接板的主要作用
1)放置肩部,给其提供固定基础,使肩部舵机位置固定。
2)支持整个腿部结构,使其能够很好地绕Z轴进行旋转。
3)与腰部配合相连,实现整体的快速连接。
(2)连接板的结构设计 为了能更加体现模块化的特点,便于加工,将连接板从整体上设计成对称结构,左右以及前后分别成轴对称。下面确定连接板的尺寸。
通过运动分析可知,运动足要能够绕最底端的伺服电动机轴旋转180°,因此设伺服电动机轴到足端橡胶底距离为l1,两足之间距离为l2,则需满足l2≥2l1。通过测量可得最底端的伺服电动机轴与足端橡胶底的距离为86mm,因此将同侧两运动足之间距离设计为190mm,如图8-24所示,这样两足便能够同时旋转而不发生运动干涉。再根据轴承大小,将连接板的整体长度设计为220mm。
根据腰的长度及对连接板上电路板放置空间的考虑,将连接板的宽度设计为110mm。连接板的尺寸设计如图8-25所示。
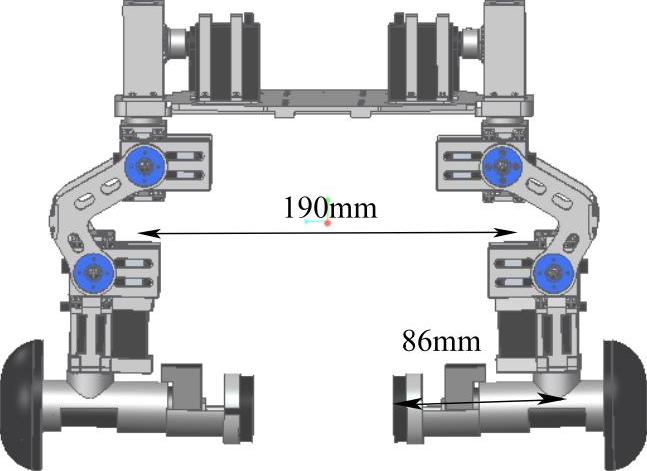
图8-24 连接板的长度设计
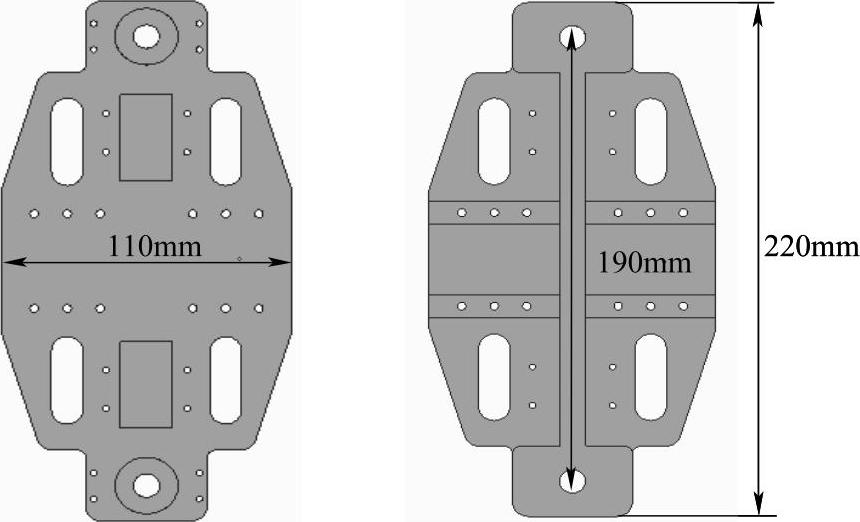
图8-25 连接板的尺寸设计
连接板与腿的连接如图8-26所示。腿轴通过板上的角接触球轴承限制其向下的运动,通过板上齿轮箱及角接触球轴承限制其向上的运动。舵机通过舵机架固定在板上预设的槽中,槽Y轴方向的长度略长于舵机X方向的长度,便于调整锥齿轮中心距。连接板在齿轮箱处收紧,与齿轮箱同宽,以减少板的质量。
连接板与腰的连接如图8-27所示。为了实现快速连接,采用6颗M4螺钉作为连接方式。为了便于快速对准,将加强肋用做导向部分,在腰上设计凸台,使其正好插入板上加强肋构成的空间中,这样既减轻了重量,也能保证板的强度。
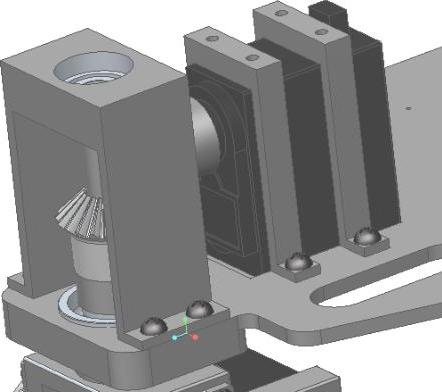
图8-26 连接板与腿的连接
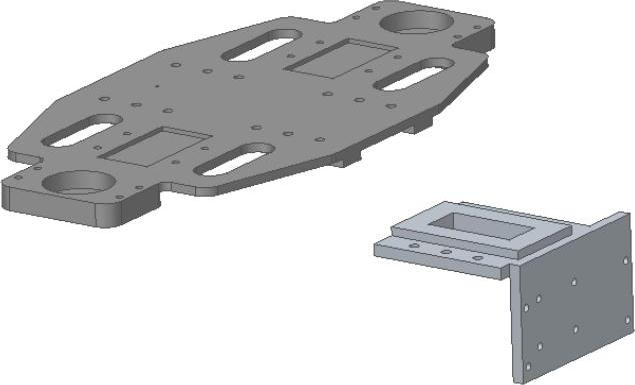
图8-27 连接板与腰的连接
(3)强度校核 为了提高千足虫宠物机器人的运动性能,减轻连接板的重量,将连接板的整体厚度设为3mm,在两端放置轴承处增厚为8mm,中间设计一横两竖三道加强肋,并在强度要求不高的地方进行打孔操作。在进行以上操作后,需要保证连接板不会因为千足虫宠物机器人的剧烈运动而断裂,在Creo Simulate1.0中对连接板进行了受力分析。
为了分析简便,将板上的电路及其他装置简化为板的重量,约为0.3kg,两端轴承处承受腿部向下的力量,四个螺纹孔承受腿部向上的力量,单条腿约为0.9kg;中部X轴方向的加强肋处受到腰部向上的支持力,螺纹孔受到向下的拉力。以下为各个状况下板的受力分析情况。
假设千足虫宠物机器人保持静态,腿部抬起时,两端受到向下的压力,中部收到向上的支持力,并假设中部X轴方向的加强肋为固定端,强度校核结果如图8-28所示。黄色箭头部分为受力,可以看出最大的压强为4MPa,而铝的屈服强度为15~20MPa,因此强度满足要求。
假设千足虫宠物机器人腿部由上向下运动,由于加速度,两端轴承处受到3倍的重力,约为27N,中部依然为固定端,运动时板强度校核结果如图8-29所示。从图中可以看出,最大压强依然小于铝的屈服强度,因此强度满足要求。
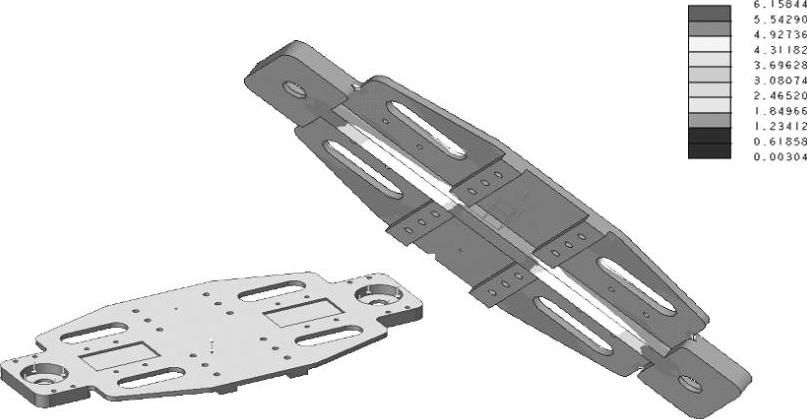
图8-28 静态时板强度校核结果
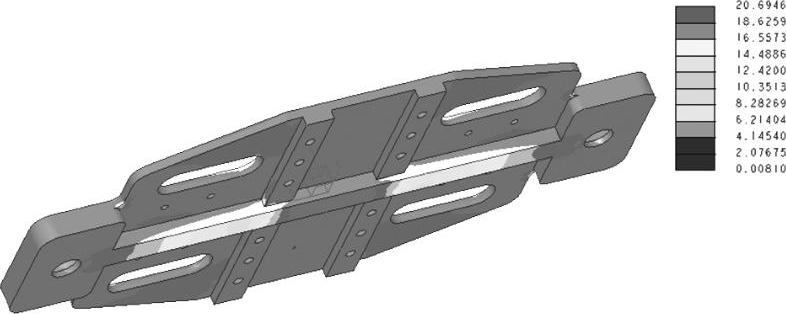
图8-29 运动时板强度校核结果
假设千足虫宠物机器人腿部由下向上运动,由于加速度,腿部对板施加两倍重力的拉力,约为18N,拉力通过齿轮箱传递给了板的螺纹孔,板中部依旧固定,强度校核结果如图8-30所示。从图中可以看出,最大压强小于10MPa,强度满足要求。
假设千足虫宠物机器人前一体节悬空,则中部螺纹孔受到向下约为22N的力,强度校核结果如图8-31所示。从图中可以看出,最大压强小于10MPa,满足强度要求。
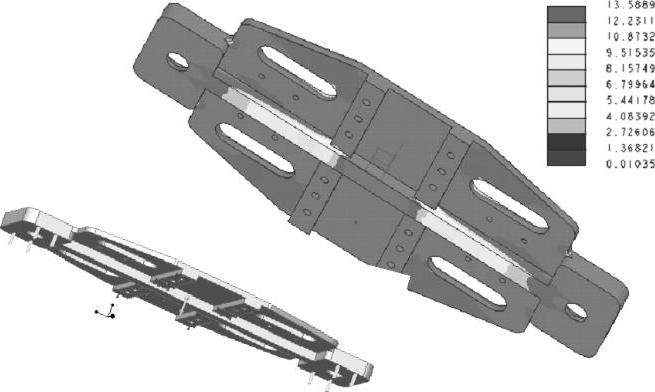
图8-30 承受拉力时板强度校核结果
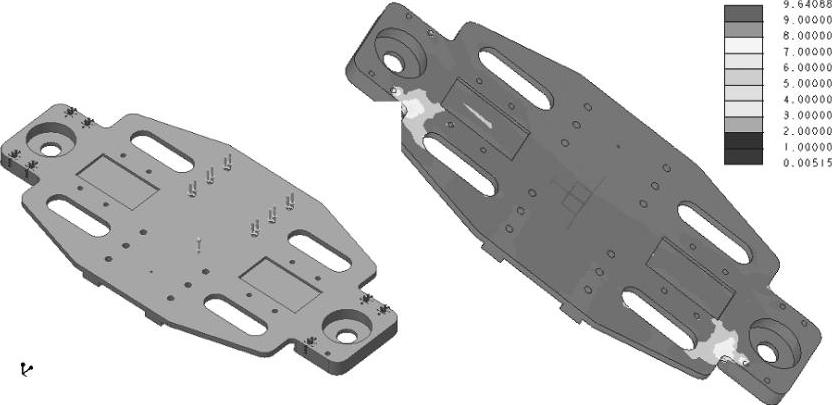
图8-31 前一体节悬空时板强度校核结果图
综上可得连接板的设计基本满足设计要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。