



1.三脚架设计计算
考虑到施救工作是在山崖边上进行的,山崖地形复杂,地势不平,因此绳索的固定十分不易。为了减少绳索与崖边突棱的磨损,需要将绳索在崖边处支撑起来。综合考虑上述特殊情况,选用三脚架作为支撑工具,并起到对拖拽绳索的导向作用。其三个支脚均可绕各自的轴转动,使各个支脚可在一定的范围内找到合适的地点固定。其中一支脚较长并可进行长度的调整,固定在离崖边稍远的小车上,小车可与地面固定。该设计可减少三脚架在承受较大弯矩时翻倒的可能性。而传统的三脚架三个支脚一样长,因此必须通过辅助绳索的拉拽才能保证其不会翻倒。三脚架如图7-6所示。
三脚架由三根可调的支脚1、2、3组成,三根支脚均可在各自的平面内做一定角度的调整,支脚1在与支脚2、3构成的平面垂直。支脚2、3均长900mm,支脚1与螺纹杆4通过螺纹配合,可进行长度方向的调整。同时螺纹杆4一端为左旋,一端为右旋,可实现两侧同时向外或向里运动,达到快速调节长度的目的,如图7-7所示。三脚架的支脚1固定长度设定为1100mm,最大长度可达1300mm。支脚2、3直接采用销钉固定在地上,销钉孔径为10mm,支脚1可与小车固定,再通过小车的固定与地面固定。图7-7所示为螺纹杆4的双向螺纹调节装置。图7-8所示为螺纹杆4的工程图。
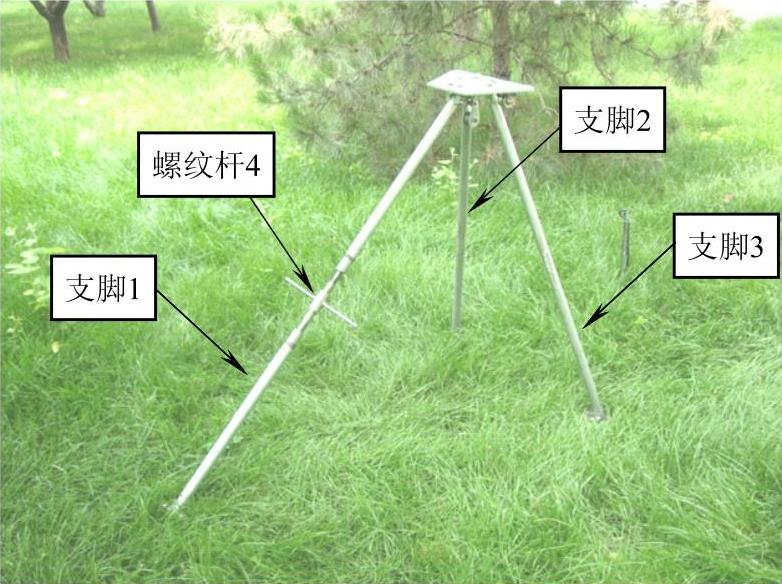
图7-6 三脚架

图7-7 双向螺纹调节装置
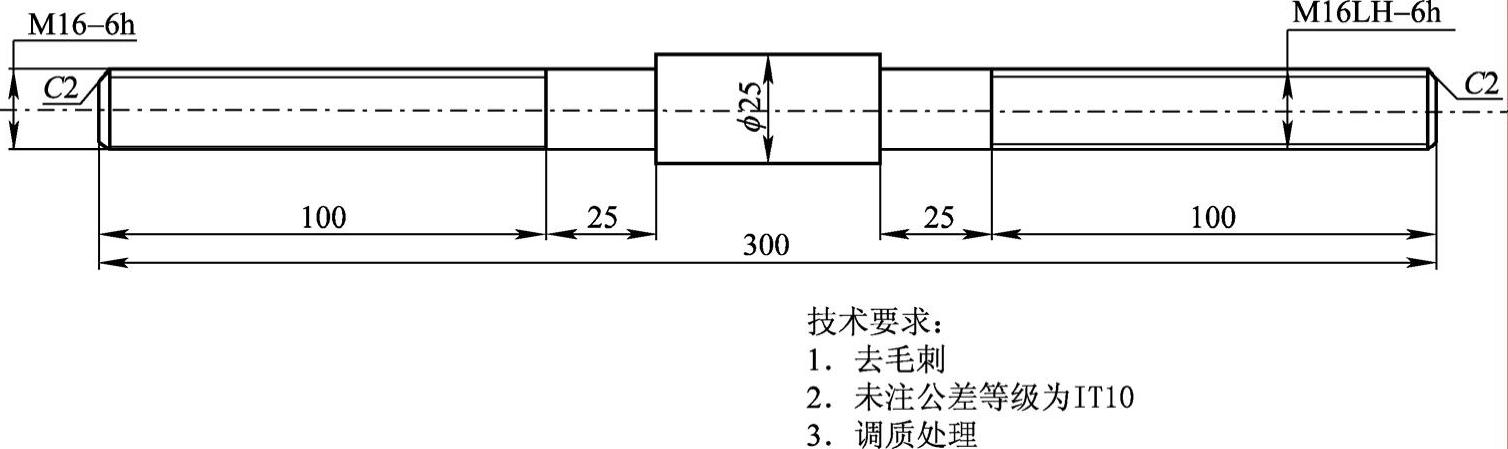
图7-8 螺纹杆4的工程图
2.绞盘设计计算
绞盘系统由一个主绞盘、两个副绞盘、布线器和动力系统组成。绞盘系统虚拟样机如图7-9所示。
由于在拖动过程中主绳索受力较大,而山体地形较为复杂,单一绳索拖拽救援担架系统的可靠性较难保障,并且极易出现翻滚偏离情况。因此在一套主绳的基础上,增加两套副绳。一方面副绳可在主绳失效的情况下,通过救援担架壳体上装有的卡绳器,牢固地与救援担架系统相接,起到保护作用;另一方面两套副绳经过分别安装在三脚架上的滑轮,会分开一定的距离。这样两条绳就构成了一个平面,使得救援担架系统沿着一平面运动,在主绳将救援担架系统向上拖拽过程中起到导向作用。两套副绳做同样的运动,两副绞盘共用一根轴。三套绞盘均安装有布线器,可使绳索均匀地缠绕在绞盘轴上,使得绳索在拖拽过程中处于较佳的受力状况。
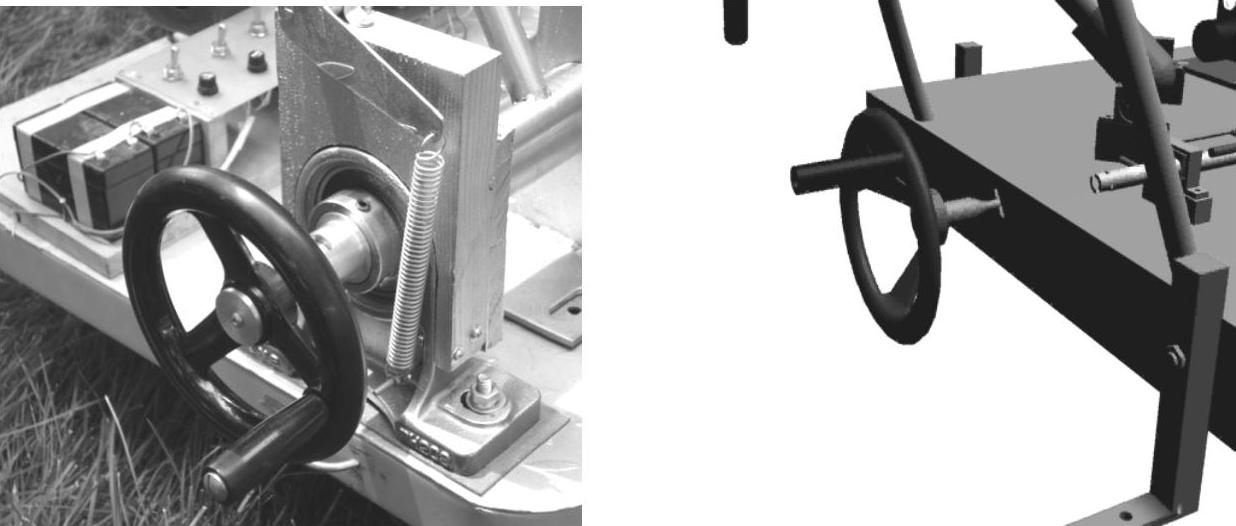
绞盘具有两套动力系统,一套是电动机驱动装置,另一套是手动驱动装置。系统中,电动机输出端通过减速器和离合器,再通过同步带传递给主绞盘。主绞盘则通过离合器与副绞盘相连,可以分别实现主绞盘的单独转动和主、副绞盘的同时转动。主副绞盘实物图如图7-10所示,副绞盘实物图如图7-11所示。手动驱动装置由主绞盘上的手动端口提供动力输入,如图7-12所示。手动端口所采用的快速拆装结构将使得两套动力装置在转换过程中实现快速切换,节省救援时间。主、副绞盘间的离合器在手动驱动条件下同样能实现主副绞盘的选通要求。此外,两种动力来源的设计,一方面提高了系统的可靠性;另一方面在绳索受力较小的情况下使用手动动力可以节省耗电量。手动端口安装手轮实物图与虚拟样机图如图7-13所示。
电动机、减速器、主副绞盘都固定在小车上。由于小车需要固定在山崖附近,又考虑到地形凹凸不平,小车尺寸不宜太大。为了节约空间,电动机和绞盘的放置如图7-9所示。
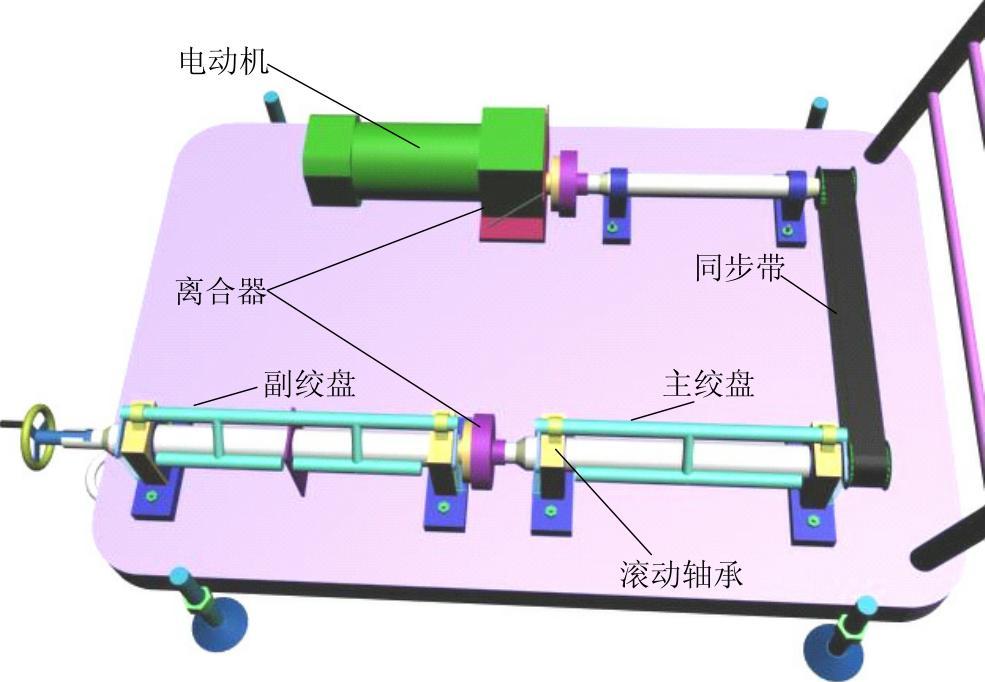
图7-9 绞盘系统虚拟样机
为了节省经费及加工时间,其中绞盘支架用轴承座替代。经过计算,轴承选用深沟球轴承,内径为50mm,外径为80mm;轴承座中心高度为100mm,底座宽70mm,长170mm。绞盘轴承座设计如图7-14所示。
拖拽绳索选用钢丝绳,根据设计需求钢丝绳最大承重为100kg,选用直径为4mm的钢丝绳。设计绞盘转轴直径为50mm。
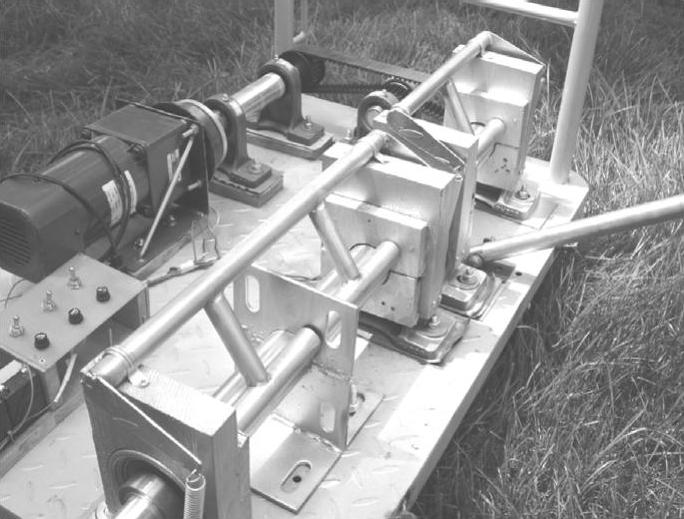
图7-10 主副绞盘实物图
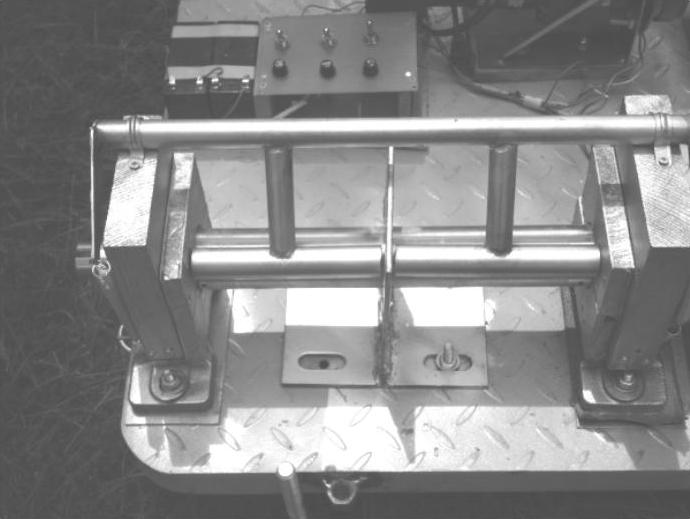
图7-11 副绞盘实物图
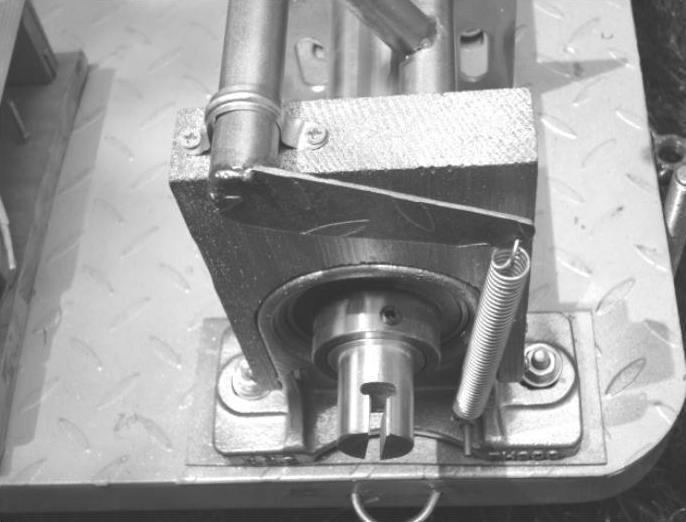
图7-12 手动端口
 (https://www.xing528.com)
(https://www.xing528.com)
图7-13 手动端口安装手轮实物图与虚拟样机图
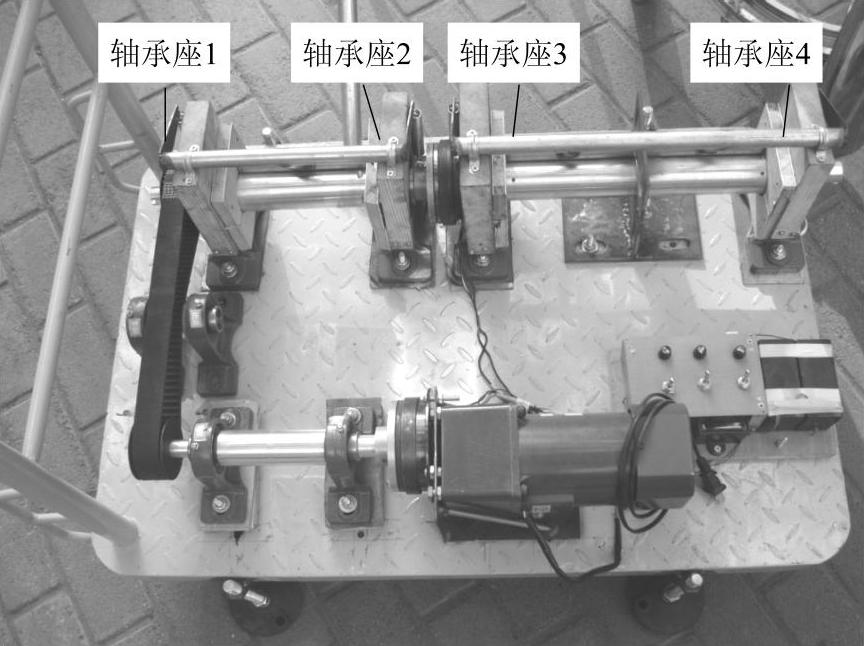
图7-14 绞盘轴承座设计
3.动力系统设计
根据项目要求,设计负载为70kg,所需电动机功率P=T/9.55=700×0.025÷9.55=73.3W。取传动效率为0.4,故电动机选用电压为220V、功率为180W的交流电动机,额定转速为1350r/min。根据设计要求,绳索运动速度为0.12m/s,ω=v/r=4.8rad/s,n=30ω/π=45r/min,则减速比为1:30,故选用减速比为1:30的减速器。同样制作了电动机的控制模块,将对电动机和离合器的开关及电动机的转速进行控制。图7-15所示为动力系统控制模块。图7-16所示为对控制模块进行操作的示意图。

图7-15 动力系统控制模块

图7-16 对控制模块进行操作的示意图
4.传动系统设计与选型
(1)轴的设计 根据实际情况及经验推理和强度计算,选取铝棒作为轴材,轴1和轴2的最小直径为25mm,轴3最小直径为20mm。轴系布局如图7-17所示。轴1、2、3的工程图分别如图7-18、图7-19、图7-20所示。
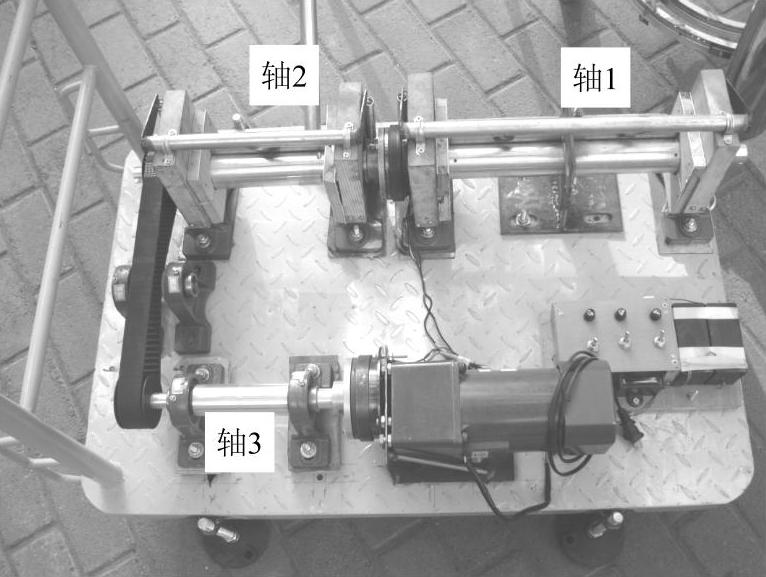
图7-17 轴系布局
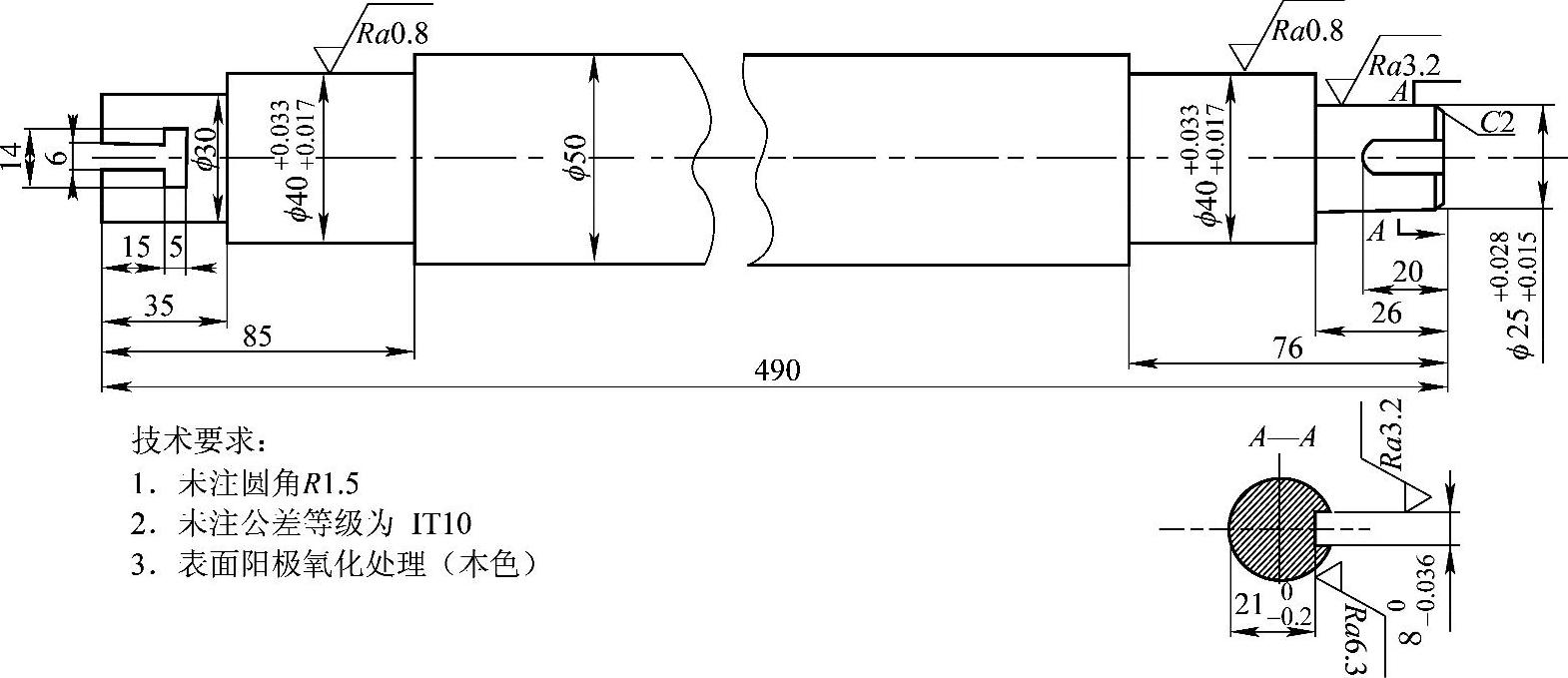
图7-18 轴1的工程图
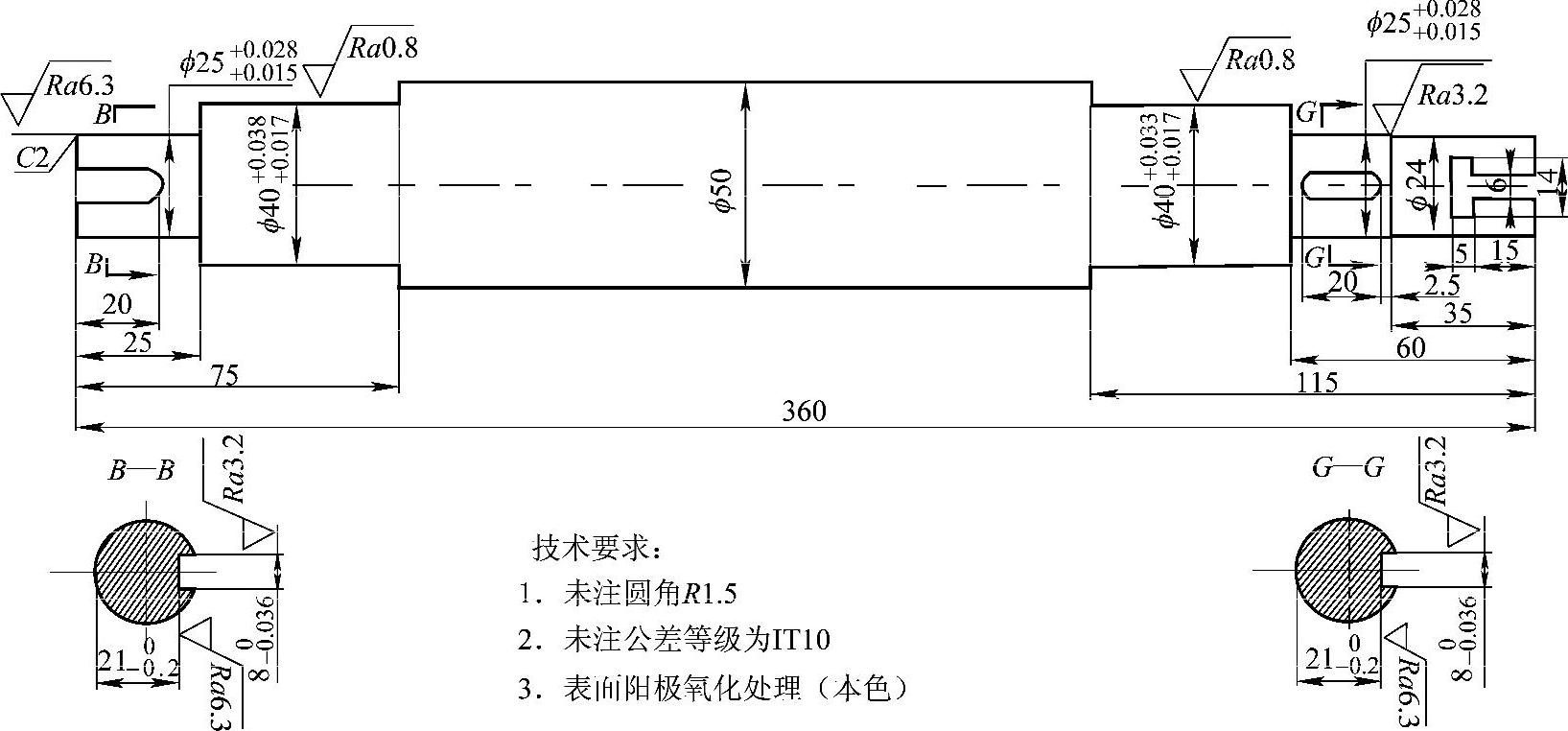
图7-19 轴2的工程图
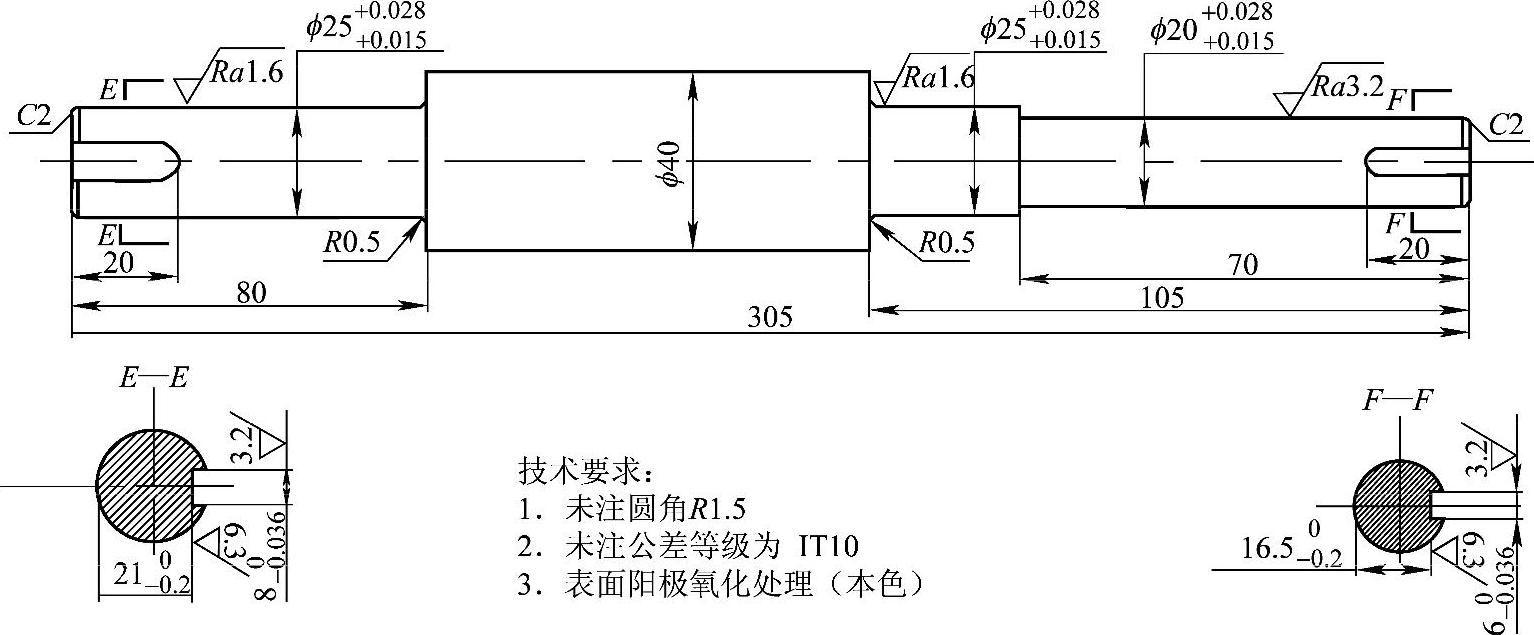
图7-20 轴3的工程图
(2)同步带的选用 由于传输距离较远,且传动输入输出的线速度较低,又考虑到安装精度的问题,故选用利用啮合传动定律的同步带作为传动装置。根据电动机选型中计算所需功率P=73.3W,并考虑到传动的损失,选用齿形为8M的圆弧齿同步带,结合市场有售同步带型号调研情况,选用的同步带参数为:带宽30mm,带长880mm,齿数110。同步带如图7-21所示。

图7-21 同步带
(3)离合器的选用 拖拽系统所用离合器采用电磁离合器。通过调研市场,综合考虑产品性能,选用DLD5系列的20/A型电磁离合器,扭矩为20N·m,额定电压为24V。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。