



1.自由度配置
本项目设计的工业焊接机械臂机械部分没有沿用传统焊接机械臂的5自由度机构,而将自由度扩展至6个。眼镜加工实际过程中,机械臂夹持镜架,在焊接激光束下移动,因此对于位姿和位置控制具有相同的精度要求。6自由度操作臂在其灵巧工作空间内,对于目标位置和位姿具有封闭的覆盖能力,加上额外配置的力矩补偿控制自由度,“新型机械臂”为6+1自由度,属于7轴联动数控加工操作臂。主体的自由度配置如图6-3所示。
在图6-3中,Zi表示各个自由度关节旋转轴的角速度正方向单位矢量。操作臂主体为6自由度开链串联关节式结构。从结构上可分为基座、第一级臂、第二级臂、腕部和末端执行器五个部分。由基座向末端各关节依次是关节1(腰关节)、关节2(肩关节)、关节3(肘关节)、关节4(腕关节一)、关节5(腕关节二)、关节6(腕关节三)。由于一般6自由度机械臂没有封闭的解析解,因此在自由度配置的过程中需要遵循一定的规则,Pieper结构是6自由度工业机器人常用的一种自由度配置方式,该方式研究了旋转轴交与一点的三个相邻自由度(对于运动轴相互平行的三个旋转关节可假设交点位于无穷远处)的6自由度操作臂运动学问题,借由轴线交于一点的三个相邻自由度形成的等效球形副,实现“腕解耦”的结构,将运动学位姿关系中的位置约束和姿态约束相互解耦,得到封闭独立的位置和姿态解析表达式。
最终“新型机械臂”的自由配置为:1、2、3关节轴线可落于同一平面内;4、5、6关节的轴线交于一点,构成“腕解耦”结构;并且保证所有相邻关节旋转轴相互平行或相互正交。在运动学上构成空间定位置关系(1、2、3关节)和空间定姿态关系(4、5、6关节)两个相互解耦的部分。图6-4所示为焊接机械臂前期演示样机结构示意及腰关节设计。
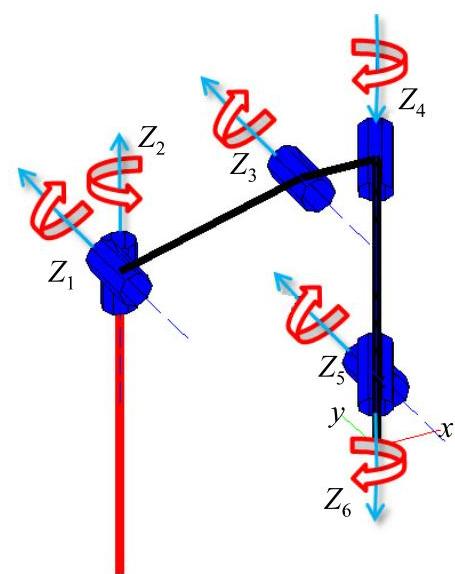
图6-3 主体的自由度配置
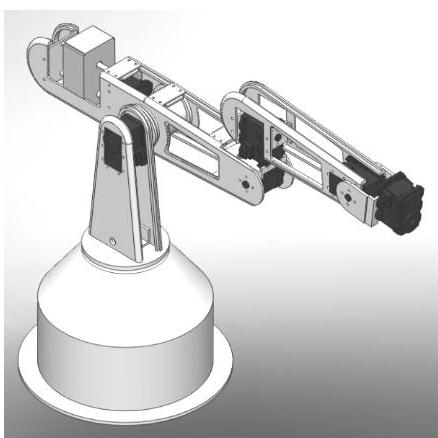
图6-4 焊接机械臂前期演示样机结构示意及腰关节设计
在整机结构设计上,力求采用创新思路,使用模块化、多功能化设计方案,使该焊接机械臂可以根据需要换装不同的末端执行部件,并可以优化重配自由度。
针对操作臂串联关节结构明确以下几个设计重点:
(1)力矩 串联操作臂为时变非线性被控对象,在力臂较长的肩关节引入了力矩闭环控制平衡锤。
(2)惯量矩 经过减速器,电动机承受的惯量矩为减速比的 ,即
,即
因此在质量设计上,以力矩平衡为优先设计因素,其次考虑转动惯量分布。在可能的前提下,将质量集中在转轴处降低惯量矩。
(3)振动的级联放大 级联结构底端的自由度的刚性和强度问题造成的震颤与重复定位精度误差,将通过自由度之间的串联耦合和机械结构上的杠杆放大作用在末端执行机构。因此,基座腰肩关键关节的结构设计成为机械结构设计的重点。
针对以上三点,最终决定的造型渲染图和原理样机如图6-5和图6-6所示。
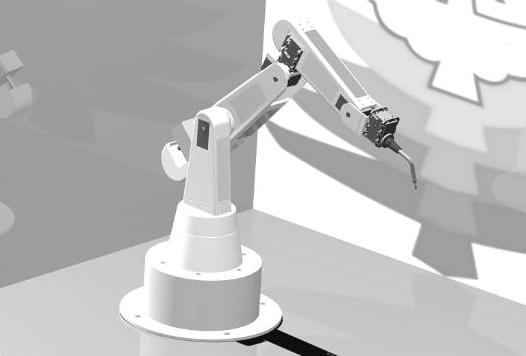
图6-5 “新型工业焊接机械臂”造型渲染图
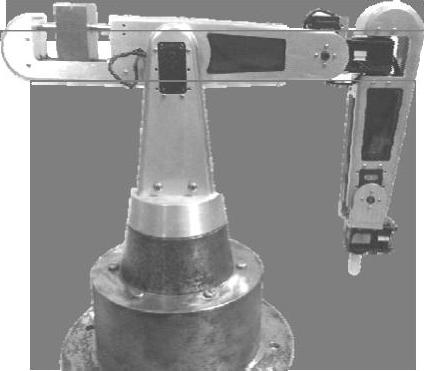
图6-6 “新型工业焊接机械臂”原理样机
自由度配置和相应的杆件长度、关节机械参数就可以约束出机械臂的实际工作空间。机械臂的工作空间表示了机械臂在伺服期间性能约束和机械结构干涉约束下的末端执行器可达域,只有在工作空间范围内,机械臂的运动学研究才有意义,而工作空间的边缘为机械臂的奇异位形点,在运动学研究中需要尽力避免。图6-7和图6-8所示分别为“新型工业焊接机械臂”xOz平面工作空间和xOy平面工作空间。
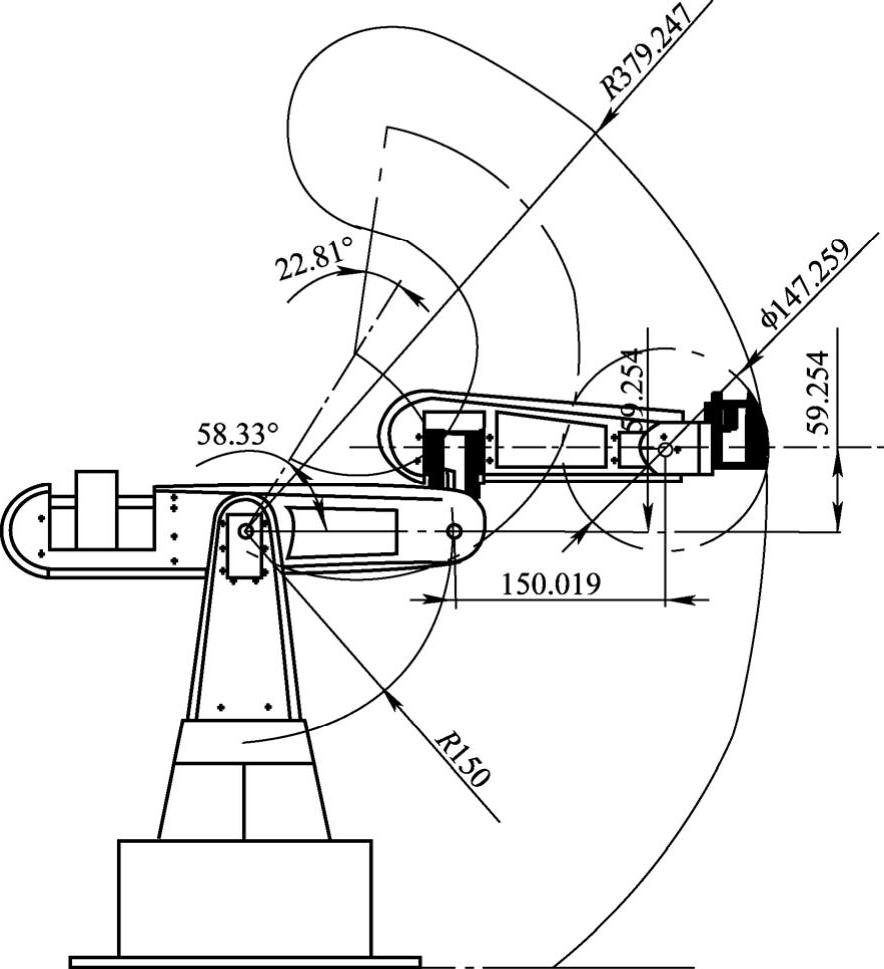
图6-7 “新型工业焊接机械臂”xOz平面工作空间
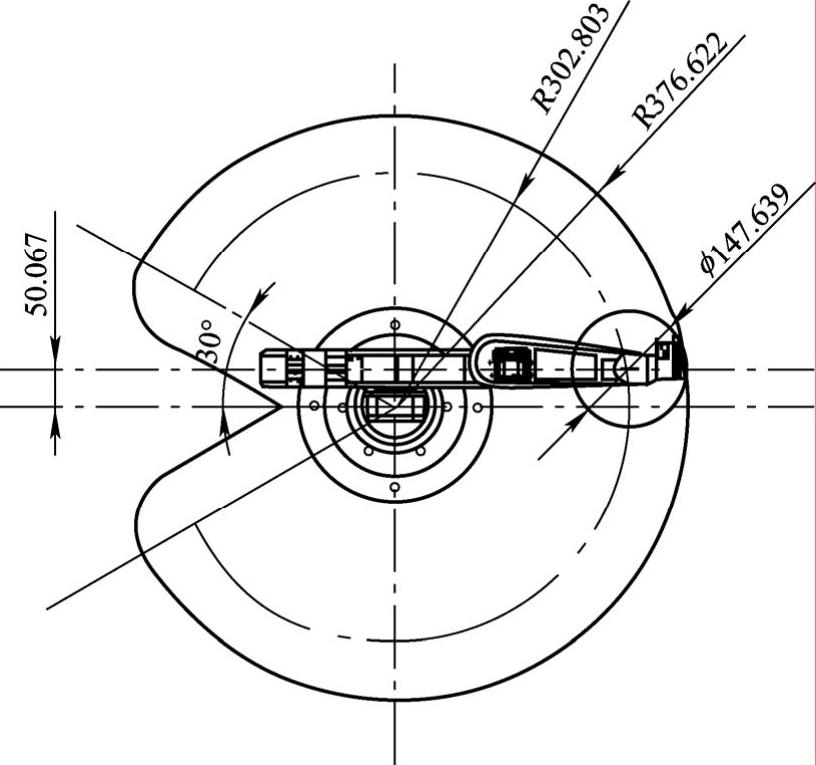
图6-8 “新型工业焊接机械臂”xOy平面工作空间
2.结构设计
由于机械臂运动部件众多,且运动状态经常改变,必然会产生冲击和振动,采用最小运动惯量原则进行结构设计,可以增加机器人的运动平稳性,提高操作机动力学特性。为此设计焊接机械臂时,在满足强度和刚度的前提下,尽量减小运动部件的末端质量,并强化运动部件对转轴的质心配置。同时要求本设计满足一定工作空间要求,在满足运动部件不发生干涉的前提下,通过尺度优化选定最小的臂杆尺寸。本项目设计采用塔形结构,腰关节外形采用锥形设计,采用45号钢,以稳定地支撑起整个结构。机座和腰关节的连接采用双轴承,推力球轴承位于竖直轴下端,起主要的承载作用;深沟球轴承位于上端,起对心导向作用。这样既保证了底部舵机轴的对中性,减小了底部的振动,又增加了结构强度。
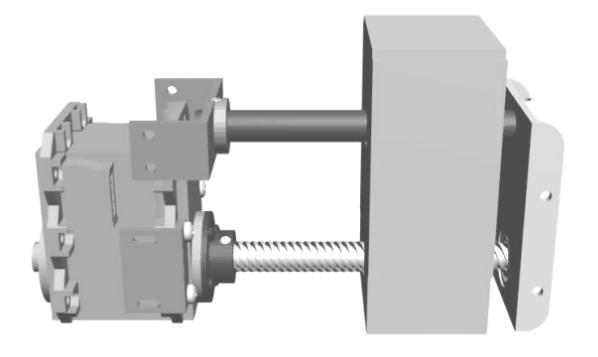
肩关节处根据其载荷和运动特点,采用分离传动。将舵机输出轴置于空心承载套内部,承载套与肩架固连。空心承载套承受径向力和轴向力,并将力传递到肩架上。肩关节舵机只输出扭矩,不承受轴向和径向载荷,这样减少了舵机的负载。由于肩轴处伸出,使得肘关节以上部分对整个结构产生偏心距,故在肩臂末端引入可自动调节的配重体,闭环平衡锤机械结构如图6-9所示。使用相同舵机及丝杠螺母结构,通过舵机总线上电流的负反馈来控制配重体移动,从而使得整个机械臂载荷力矩平衡,形成对肩关节的力矩闭环控制。肘关节、腕关节一、腕关节二、腕关节三是依次作为负载起作用的,选用高强度材料,配以经过合理力学分析设计的减重孔,在保证结构强度的前提下,减轻零部件的质量。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-9 闭环平衡锤机械结构
在机械臂整体造型设计上,为了保证腰、肩部分的刚性和稳定性,应使其结构造型趋于稳定厚实;腕关节部分在保障结构强度的基础上,还应体现轻盈灵便和工业美感,造型风格应倾向曲面为主。图6-10所示为第二代使用无刷直流电动机的焊接机械臂结构设计方案草图。造型分为基本功能结构造型,以及基于工业设计的美化包覆造型。基本功能结构为空心结构架,与外包覆件用螺钉连接。
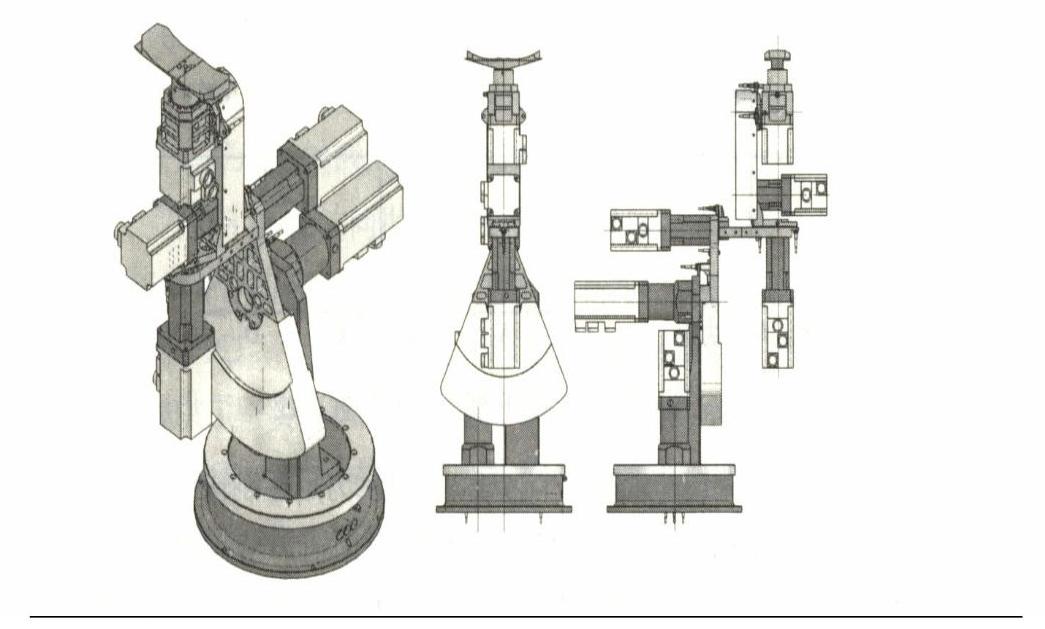
图6-10 第二代使用无刷直流电动机的焊接机械臂结构设计方案草图
3.伺服器件特性
作为本科生的创新实验项目,出于研究经费和成本考虑,“新型机械臂”无法使用高性能的直流无刷伺服电动机和谐波齿轮减速器来设计关节驱动单元。经过细致的多方考量和充分的市场调研,最终选择了韩国Dynamixel RX24F机器人舵机作为机械臂的关节驱动单元,实物图如图6-11所示。其具体性能指标如下:
1)重量:67g。
2)尺寸:35.5mm×50.8mm×41.8mm。
3)分辨率:0.29°。
4)减速比:193:1。
5)堵转力矩:26kg·cm(在12V,2.4Ah)。
6)伺服角度:0°~300°(角位移伺服模式);360°(连续转动模式)。

图6-11 Dynamixel RX24F机器人舵机实物图
7)工作温度:−5~+85℃。
8)供电电压:9~12V。
9)控制信号:专有格式数据包。
10)协议类型:RS485异步串行通信(8位数据位,1位停止位,无奇偶校验)。
11)物理连接:RS485多点分支总线。
12)ID:254ID(0~253)。
13)通信速率:7843bps~1Mbps。
14)反馈:位置,温度,载荷,输入电压。
15)材料:全金属齿轮,工程塑料壳体。
16)待机电流:50mA。
该舵机将电动机、电动机驱动、减速器全部集成,可按照固有的数据包格式通过RS485总线直接控制。R24F舵机为角位置伺服电动机,使用高精度塑料电阻式角位置传感器进行反馈,通过10位A/D进行采样,实际位置分辨率为300°/1024=0.293°。通过内建算法间接实现了无量纲的速度控制(基于位置差分和桥路电压PWM控制方式实现)和无量纲的力矩控制(基于电流环控制实现)。可以针对“新型机械臂”控制特性需要进行调整的控制特性曲线如图6-12所示。
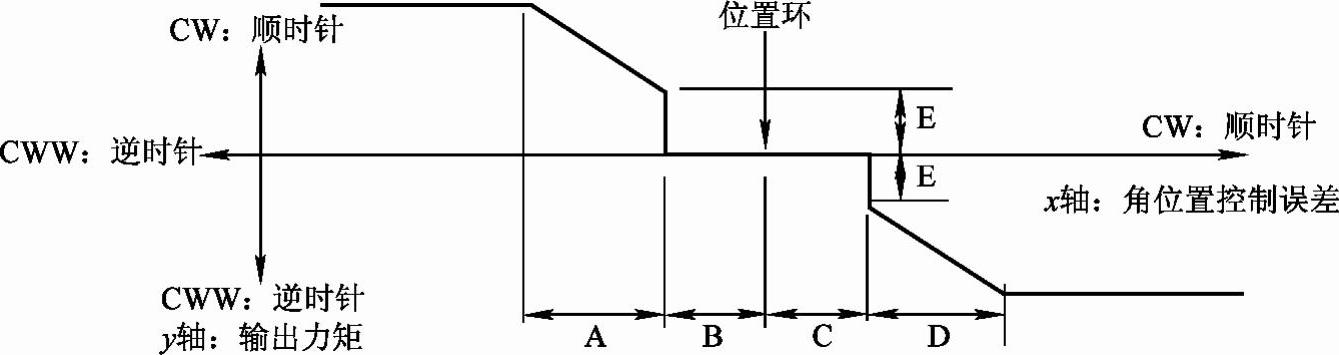
图6-12 RX24F舵机控制特性曲线
在图6-12中,具体控制特性体现在6个区段。E表示力矩控制输出的下门限值,即为实际输出的最小力矩。B、C表示两个方向的控制误差控制下门限值,当角位置误差大于该门限值时,位置环才开始休整,该参数对应控制寄存器地址为26和27(分别对应CW和CCW),可通过参数调整,装载值直接对应A/D采样结果,即边界值1对应0.293°。对于机械臂来说,位置伺服精度为第一关键参数,此处将26、27寄存器值设定为0,即实际的位置伺服精度为0.293°。A、D段对应力矩/误差控制斜率,该参数对应控制寄存器地址为28和29(分别对应CW和CCW),对该寄存器的操作,相当于改变位置环控制器的系数KP,直接反应控制器的硬度,增大该系数,系统响应会加快,但是会带来超调震荡的弊端;减小参数会使控制过程更加稳定平滑,但是会加大控制上升时间,造成幅值衰减和相位滞后,导致丢失控制细节。该参数的设定需要根据实际情况具体整定调整。A、D段以外的部分为实际输出力矩的上限,该参数对应控制寄存器地址为14和15(分别对应CW和CCW),对该寄存器的操作相当于P控制器的输出限幅。根据以上控制特性分析可得,RX24F舵机的实际控制模型为具有电流限幅的位置环P控制器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。