



1.系统结构分析
“新型工业焊接机械臂”定位为解决方案层次的系统设计。系统主要包括以下几部分:交互式虚拟运动仿真系统、MATLAB算法建模系统、嵌入式控制系统和机械被控实体。如图6-1所示。
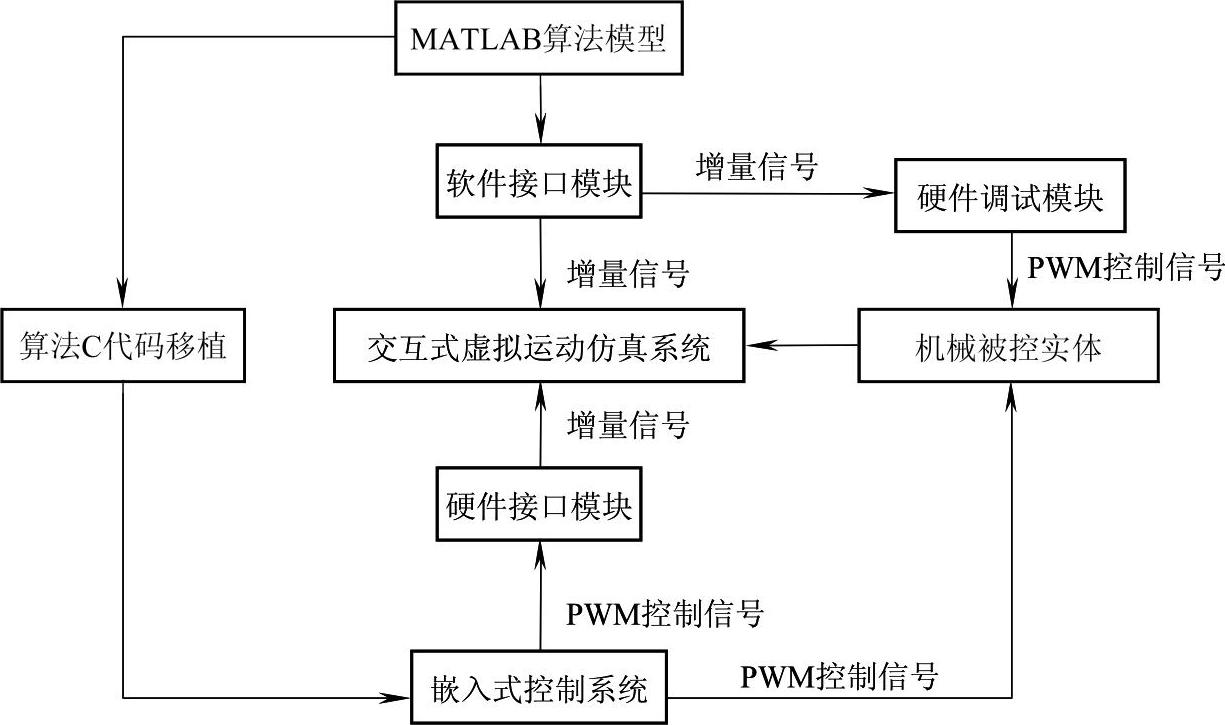
图6-1 系统工程结构网络图
工程前期,系统工程以交互式虚拟运动仿真系统为核心,构建交互式可视化的虚拟实验平台和性能评估系统。在MATLAB算法建模系统中建模的运控算法通过软件接口模块与仿真系统衔接,通过仿真系统检测算法性能。经过仿真系统校验的成熟算法,经过代码翻译移植入嵌入式控制系统。嵌入式控制系统产生的控制指令经过硬件接口模块进入仿真系统,同样经过仿真系统的评估检验。
工程后期,完成机械被控实体的研制,MATLAB算法建模系统与嵌入式控制系统产生的控制指令可以通过相应接口直接控制机械被控实体。通过机械实体的内部传感器,将实际响应数据送入仿真系统内的评估函数,进行实际控制效果的评估与校验。
通过以上两个过程最终完成系统整体功能的实现与优化,系统指令流程图如图6-2所示。
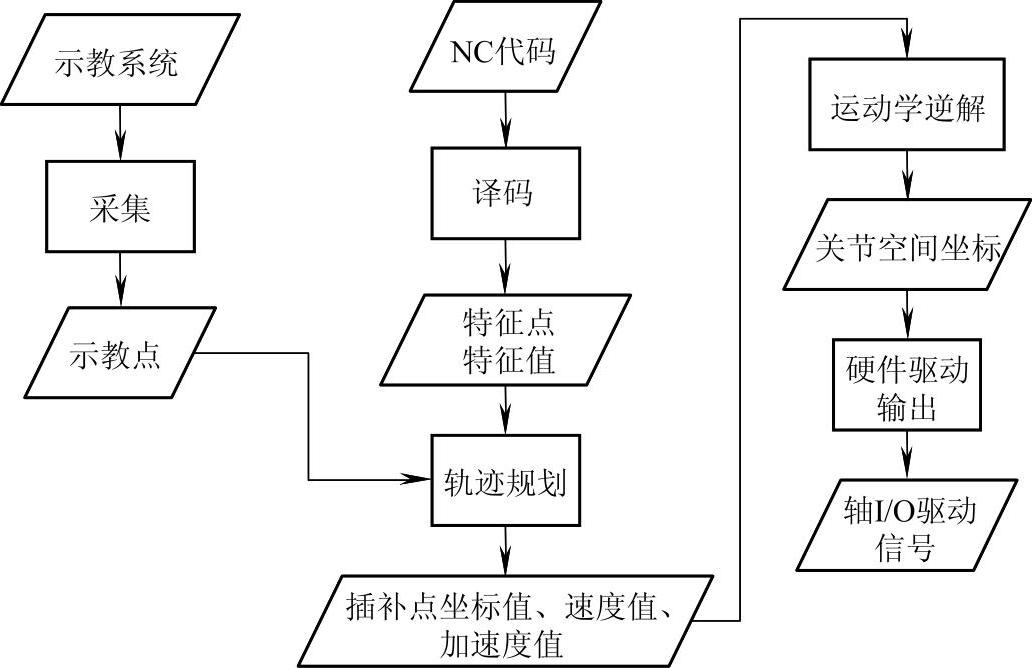
图6-2 系统指令流程图
2.控制系统需求分析
工业机械臂的控制系统主要包括以下几方面的功能:
1)电源管理:实现整机的电源管理,完成过电压过电流及断电保护功能。(https://www.xing528.com)
2)安全防护:根据现场环境条件能够实现紧急停机等保护功能。
3)伺服驱动:实现各个关节轴驱动单元的位置、速度、力矩伺服控制。
4)运动控制:多轴联动轨迹规划和运动学计算。
5)指令存取:针对特定数控加工脚本指令的存取、编辑及译码转换。
6)人机界面:实现人机交互,实现具体操作功能。
7)通信接口及总线:通过PLC等节点指令,完成多机协同等通信功能。
控制系统在架构上一般由一台控制柜和相应的示教面板、示教盒组成。控制柜内置嵌入式控制系统或工控PC,还包含有电源管理和本机的安全防护模块,工位的安全防护由PLC完成。示教面板或示教盒用来实现人机操作界面,操作工可以通过面板或示教盒完成相应的编程和操作工作。
3.平台需求分析
“新型机械臂”使用了Dynamixel RX24F舵机作为关节驱动单元,伺服驱动部分已经在舵机中集成,伺服驱动的指令通过RS485多点分支总线以专有格式的数据包形式进行读写。所以在硬件上,控制系统主要实现电源管理、安全防护、运动控制、指令存取、人机界面和接口通信功能。软件方面,控制系统需要实现与各个功能相对应的底层硬件驱动程序,通过适当的操作系统进行系统资源调度和具体功能实现。
4.算法需求分析
作为实现激光点焊功能的操作臂,要求机械臂具有良好的点定位功能,并具备良好的路径规划能力,能够复现数控加工脚本指令轨迹。针对这些要求,系统需要的控制算法主要是能在“新型机械臂”上实现快速高精度的正运动学、逆运动学求解算法,以及能够处理速度、加速度连续问题的轨迹规划算法,并且能通过平台直接实现NC代码的译码,以实现实际的数控加工任务。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。