



1.机器人位姿变化运动
在进行本运动实验前对仿生六足机器人的运动稳定性进行了测试,对机器人施加短时外部冲击,机器人关节误差能迅速收敛,恢复期望位姿。实验表明,仿生六足机器人具有很好的抗干扰能力。
仿生六足机器人在任意足着地时均为6个自由度,理论上可以实现六自由度运动。仿生六足机器人可以在任意位姿下改变位姿,而且位姿变化的整个运动过程连续、迅速。图5-52~图5-54显示了仿生六足机器人在位姿变化运动的10s内各个关节电动机的运动轨迹,该过程实现了机器人“沿y轴移动50mm—绕y轴旋转10°—沿z轴移动50mm—绕z轴旋转10°—绕z轴旋转-10°—沿z轴移动-50mm—绕y轴旋转-10°—沿y轴移动-50mm—绕x轴旋转-10°—绕x轴旋转10°”这样一次连续的过程。图5-55显示了原理样机的实际运动效果。可见,所设计的仿生六足机器人原理样机具有很好的灵活性,可根据需要实现特定位姿,为其在非结构环境下运动奠定了良好的基础。
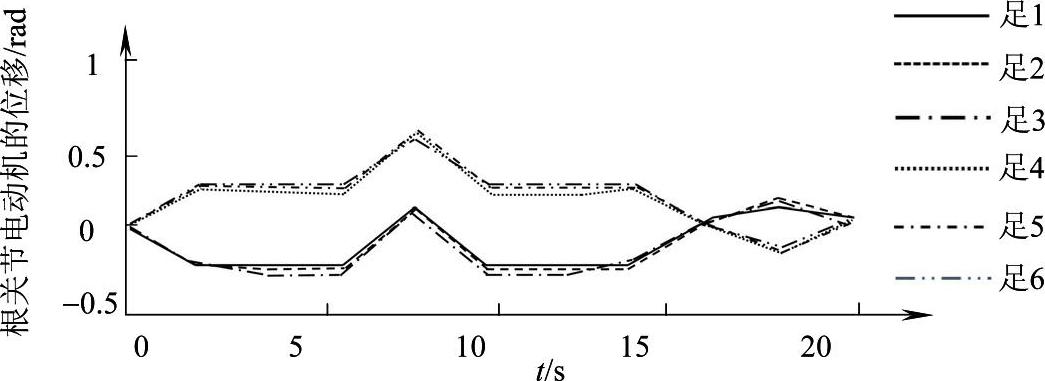
图5-52 位姿变化运动根关节电动机位移曲线
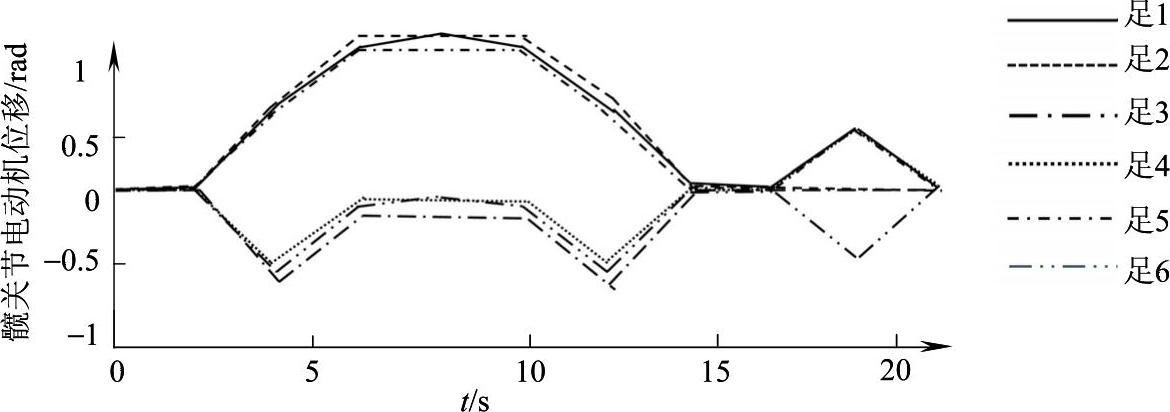
图5-53 位姿变化运动髋关节电动机位移曲线
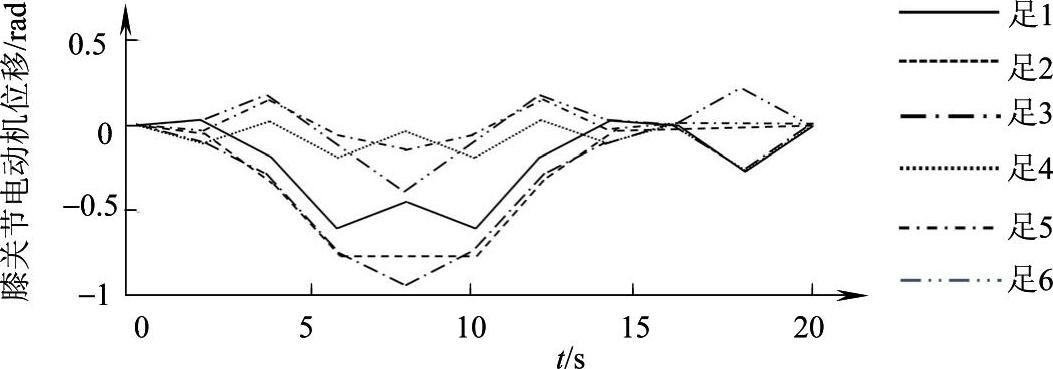
图5-54 位姿变化运动膝关节电动机位移曲线
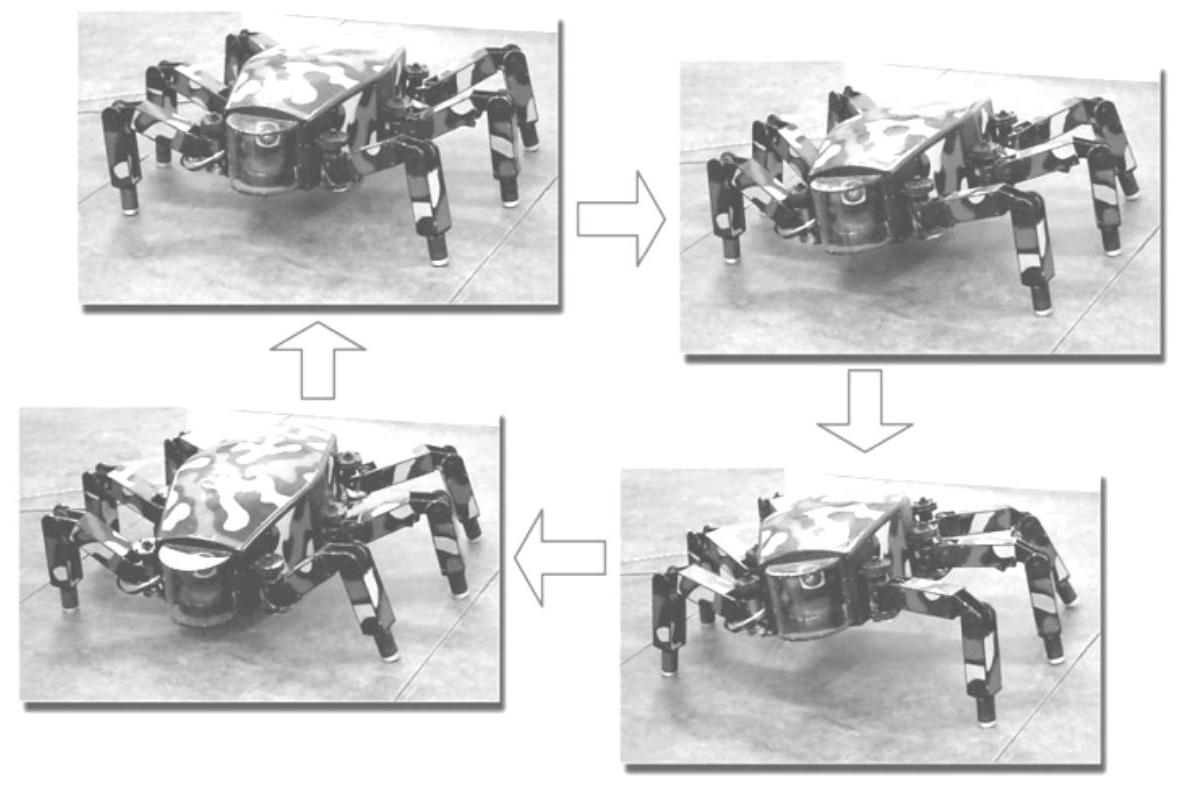
图5-55 仿生六足机器人位姿变化过程截图
2.机器人全向移动
位姿变化运动可以体现机器人良好的灵活性,而全向移动更能体现机器人的机动性,因此在考察机器人的性能时非常关注其全向移动能力,在这一方面,仿生六足机器人原理样机体现出非常好的机动性,不仅可以实现全向直线移动、原地转向移动,而且能实现这两种运动的综合形式——曲线移动。
图5-56~图5-61所示为仿生六足机器人在直线前进移动时各个关节电动机的位移曲线,其中,前进速度为144m/h,步长为200mm。可见,各个关节保持固定的耦合相位,实现了周期不规则步态。
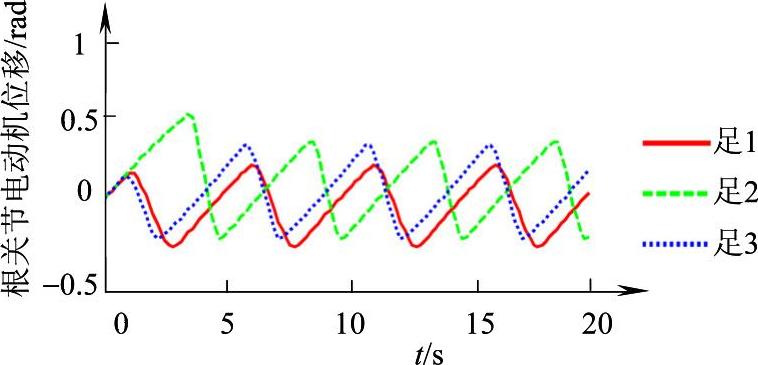
图5-56 前进移动左侧根关节电动机位移曲线
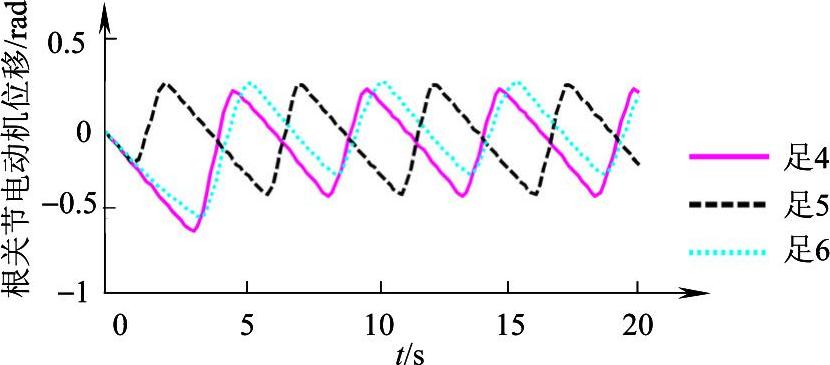
图5-57 前进移动右侧根关节电动机位移曲线
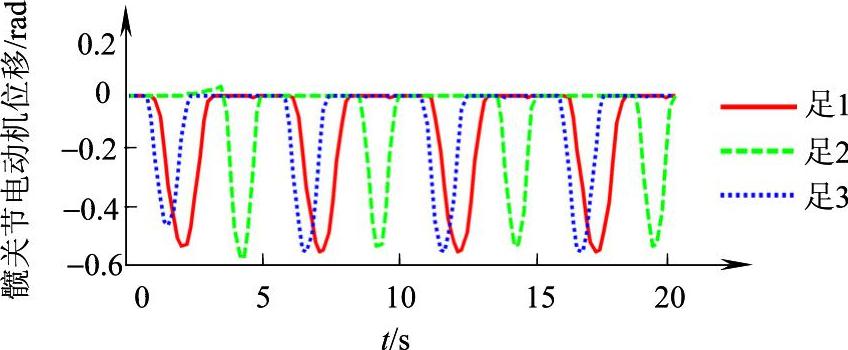
图5-58 前进移动左侧髋关节电动机位移曲线
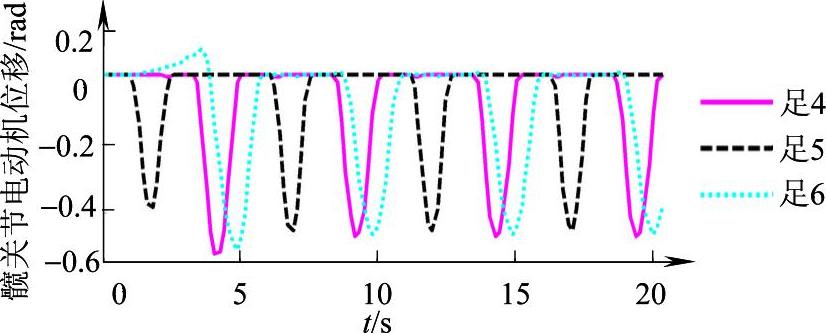
图5-59 前进移动右侧髋关节电动机位移曲线
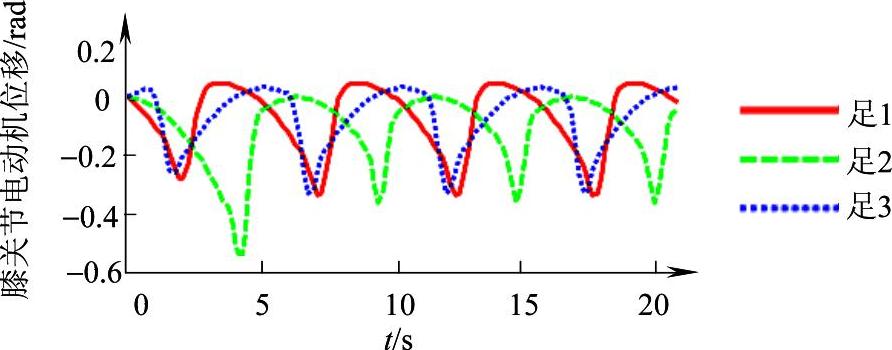
图5-60 前进移动左侧膝关节电动机位移曲线
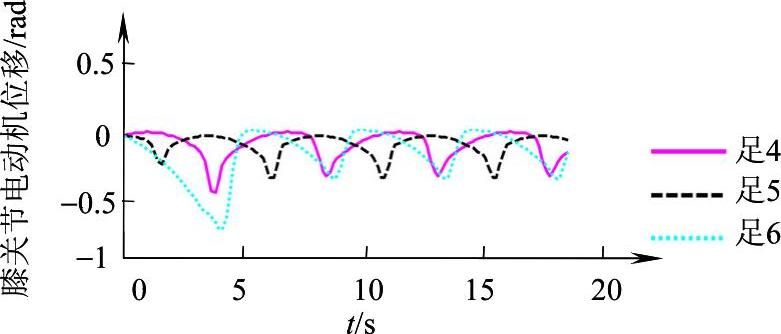
图5-61 前进移动右侧膝关节电动机位移曲线
上述运动相应的躯体左侧关节速度曲线如图5-62~图5-64所示。可见,关节速度曲线平滑,起伏范围较小。仿生六足机器人实验过程(实验过程截图如图5-65所示)表明机器人躯体可保持匀速、平稳地前进,没有明显的振动或起伏,各足的运动轨迹平稳,支撑相和摆动相之间的切换过程连续。由于采用周期不规则步态,整个运动过程表现得更加协调、自然,因而大大增强了机器人的运动稳定性。
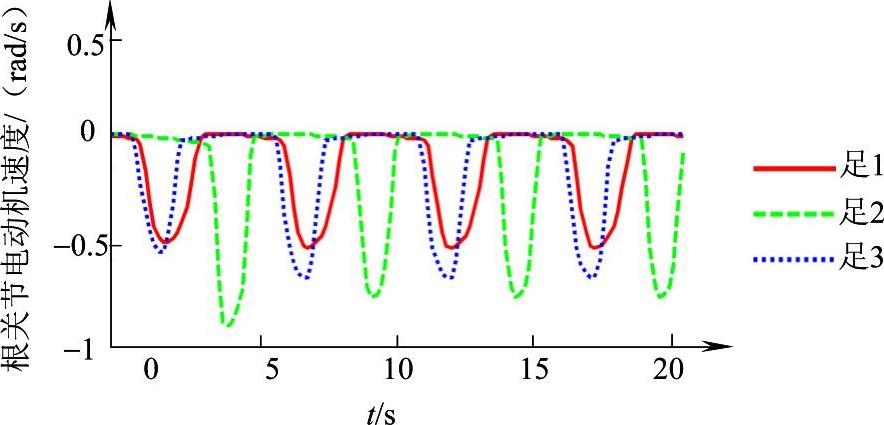
图5-62 前进移动左侧根关节电动机速度曲线
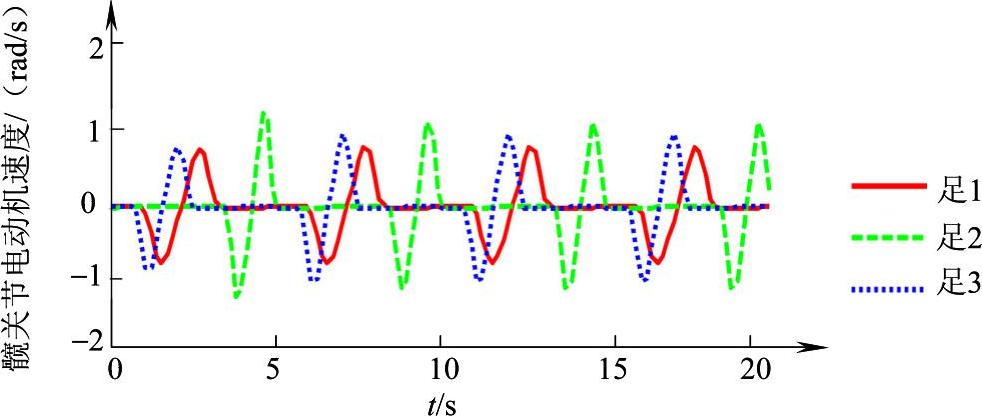
图5-63 前进移动左侧髋关节电动机速度曲线
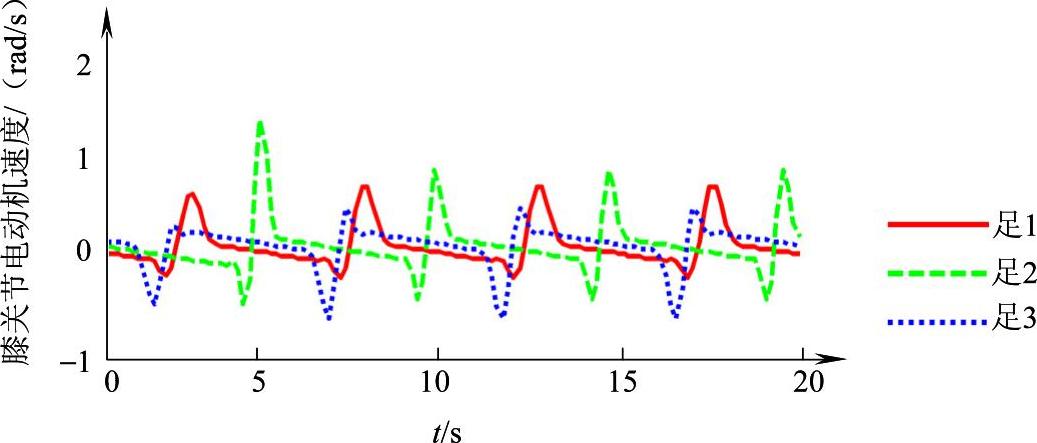
图5-64 前进移动左侧膝关节电动机速度曲线
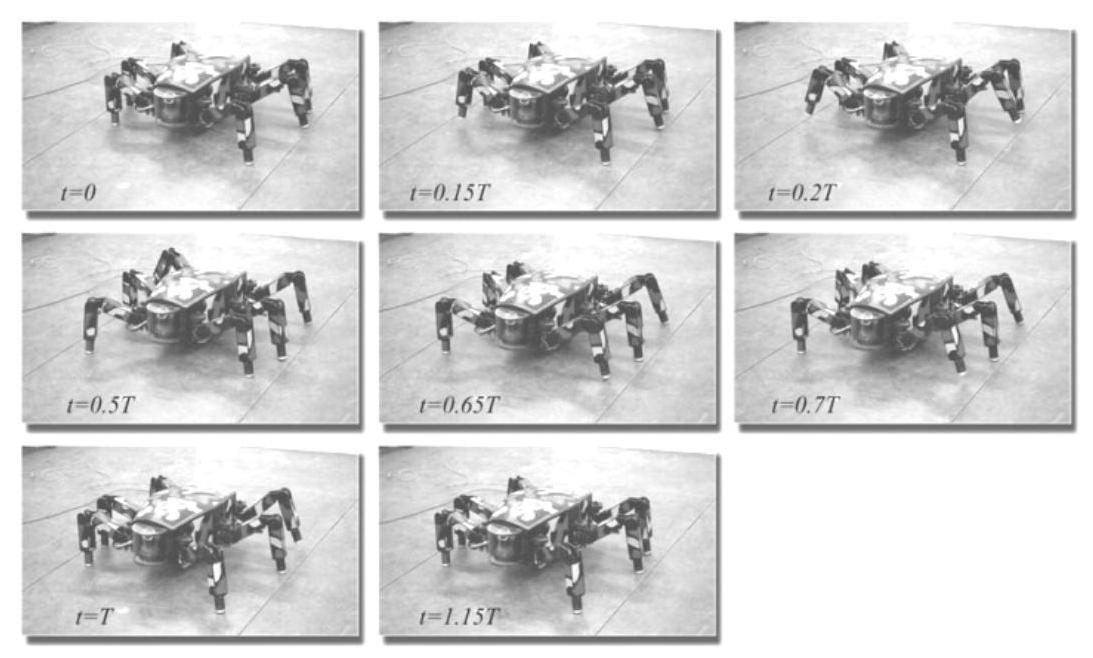
图5-65 仿生六足机器人直线前进过程
仿生六足机器人不仅可以在任意姿态下实现任意方向的平移,而且能以一定范围内的角速度进行原地转向。图5-66~图5-67所示为仿生六足机器人原地左转时根关节电动机的位移曲线,转向角速度为7°/s。与匀速直线前进对比,机器人原地转向时,对应根关节的行程发生改变,对应的髋关节和膝关节位移曲线也随之产生较大变化,但是各个关节仍旧保持固定的相位关系。仿生六足机器人原地转向实验过程如图5-68所示。(https://www.xing528.com)
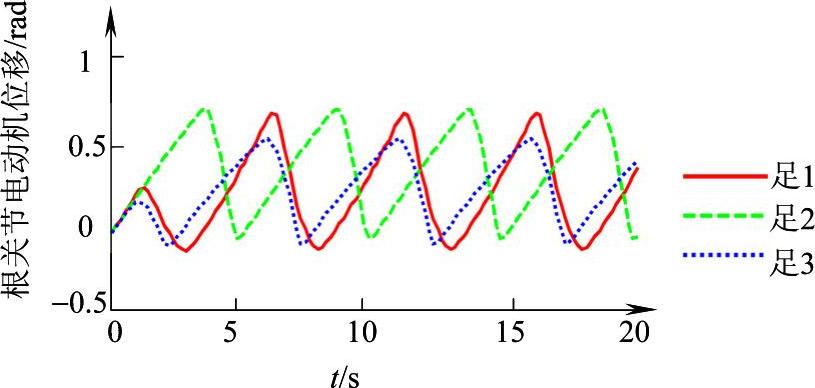
图5-66 原地左转左侧根关节电动机位移曲线
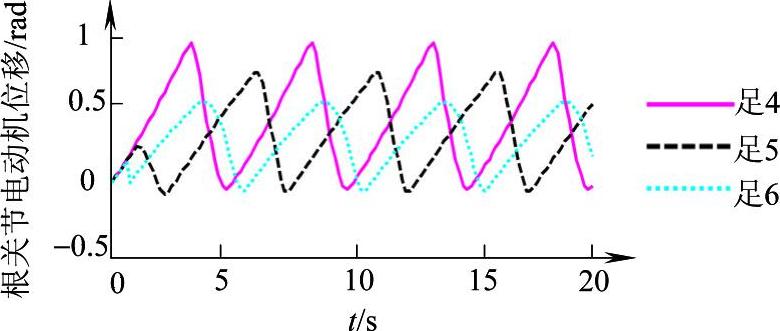
图5-67 原地左转右侧根关节电动机位移曲线

图5-68 仿生六足机器人原地转向实验过程
实验表明:仿生六足机器人能以恒定的角速度进行原地转向,转向过程平稳,单步转角大。同时,机器人具备实时在线运动能力而能以操作者期望的角速度进行任意角度的转动,因此具有相当高的灵活性。
理论上,机器人只要具备直线移动能力和原地转向能力就能移动到任意目标位置,但是在特定环境下单一的移动过程会严重影响运动效率,此时,合理的曲线移动路径可以很好地兼顾移动距离和移动速度。通过位姿、速度和角速度等因素的协调或改变,仿生六足机器人可以沿任意曲线路径移动。图5-69所示为仿生六足机器人的曲线移动过程。

图5-69 仿生六足机器人的曲线移动过程
实验表明:仿生六足机器人能够很好地跟踪圆弧路径曲线,并且移动过程中角速度恒定,躯体移动平稳,各足运动协调。
3.机器人越障运动
仿生六足机器人不仅具有很好的灵活性和平地机动性,而且具有良好的越障性能,越障运动实验表明其能够满足适应复杂环境的机动需求。
图5-70~图5-72所示为仿生六足机器人攀越130mm高台阶的过程中躯体左侧关节电动机位移曲线,由图可见:此过程中的根关节电动机位移曲线与平地直线前进时的类似,只是在接近台阶边沿时稍有差异,体现了仿生六足机器人在台阶边沿附近探寻可靠着地点的动作;髋关节在上台阶前、后位移曲线相同,表明机器人在台阶上和台阶下具有相同的位姿和离地高度。仿生六足机器人上台阶过程如图5-73所示。
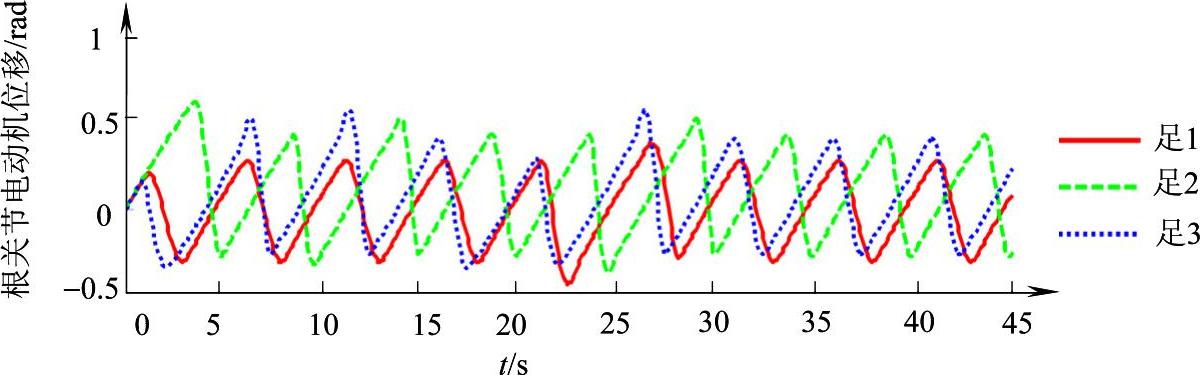
图5-70 上台阶左侧根关节电动机位移曲线
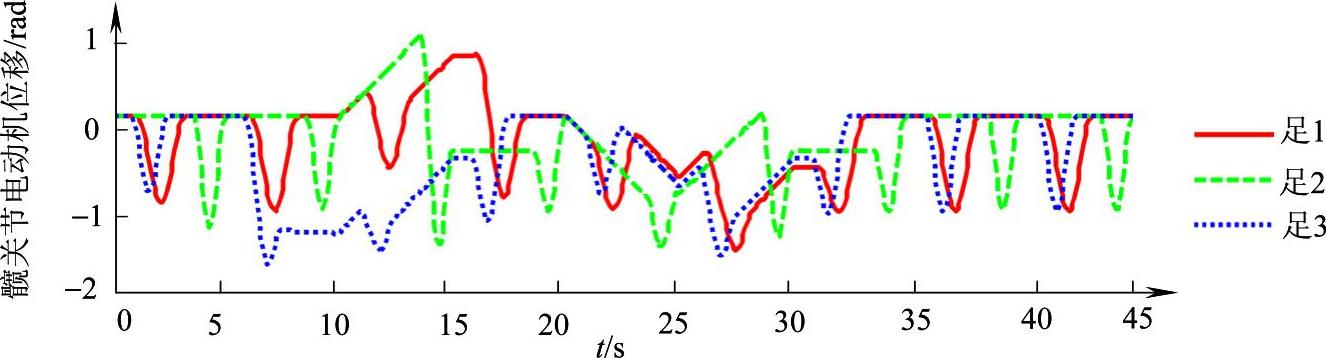
图5-71 上台阶左侧髋关节电动机位移曲线
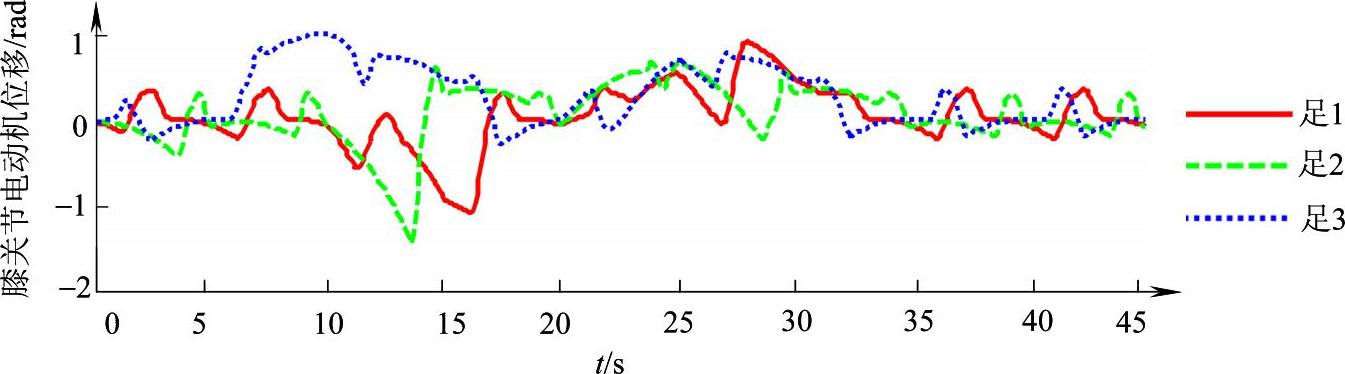
图5-72 上台阶左侧膝关节电动机位移曲线
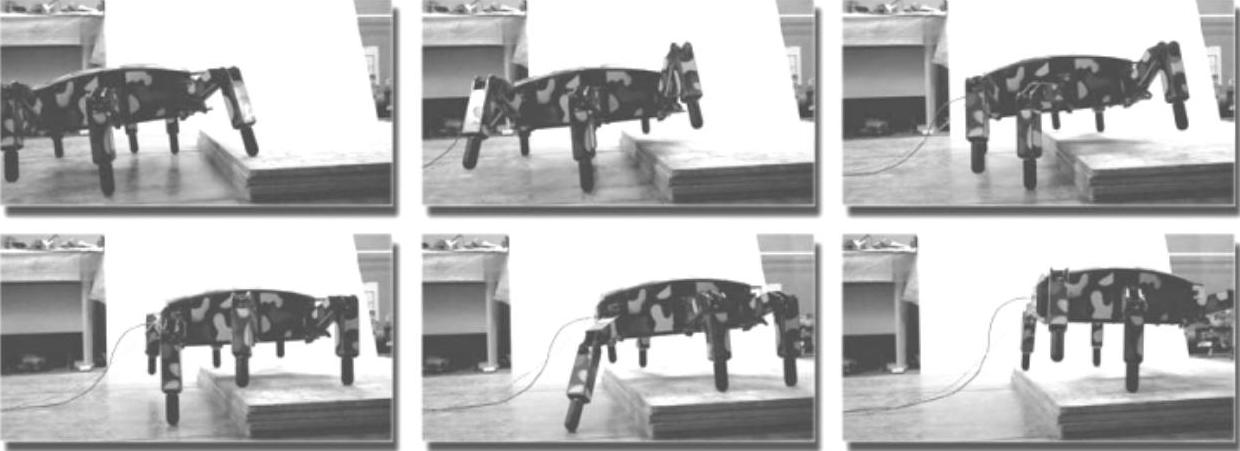
图5-73 仿生六足机器人上台阶过程
图5-74~图5-76所示为仿生六足机器人攀爬10°斜坡时其躯体左侧关节电动机的位移曲线,这个过程中的根关节电动机位移曲线与平坦地面上前进移动过程中的类似,髋关节和膝关节电动机在经过上坡调整后各自的位移曲线与上坡前的类似,其中前足和后足沿y轴出现平移,表明各足的运动轨迹与其在平面上的运动轨迹基本相同,而前足与后足在坡面上的“基本位姿”则与平面上的略有不同。仿生六足机器人攀爬斜坡的运动过程如图5-77所示。
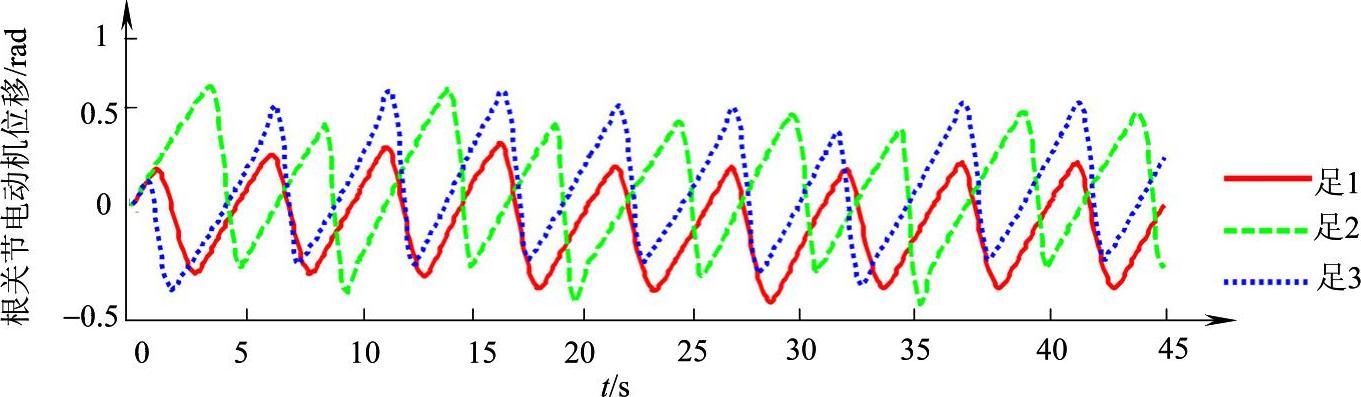
图5-74 上坡左侧根关节电动机位移曲线
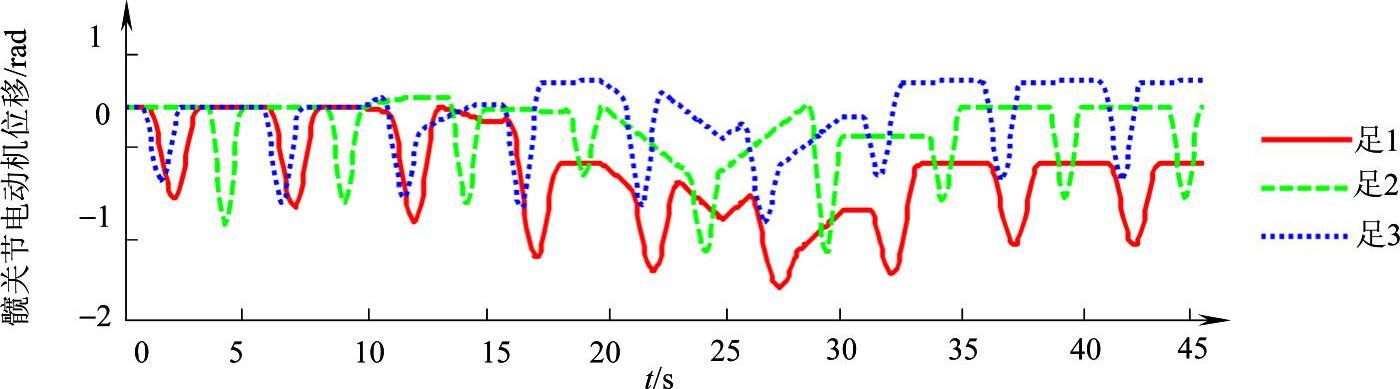
图5-75 上坡左侧髋关节电动机位移曲线
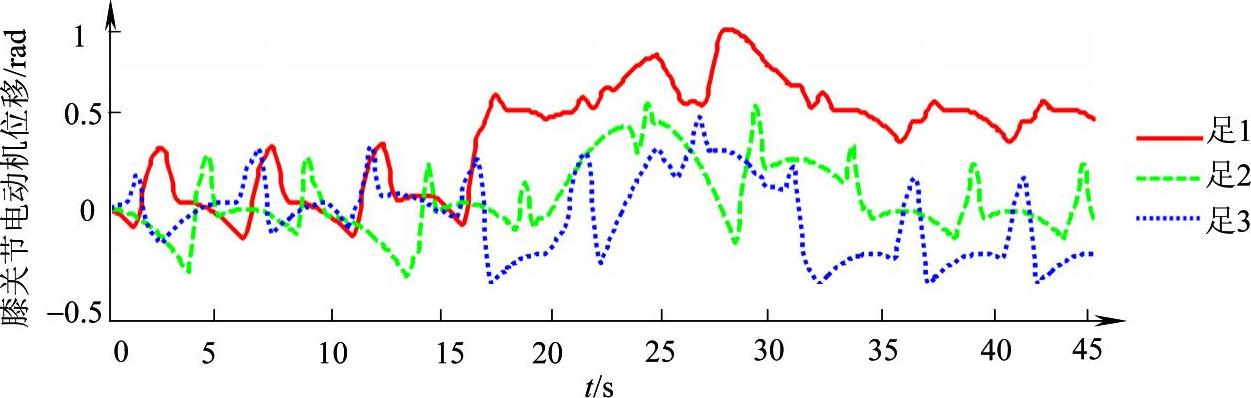
图5-76 上坡左侧膝关节电动机位移曲线
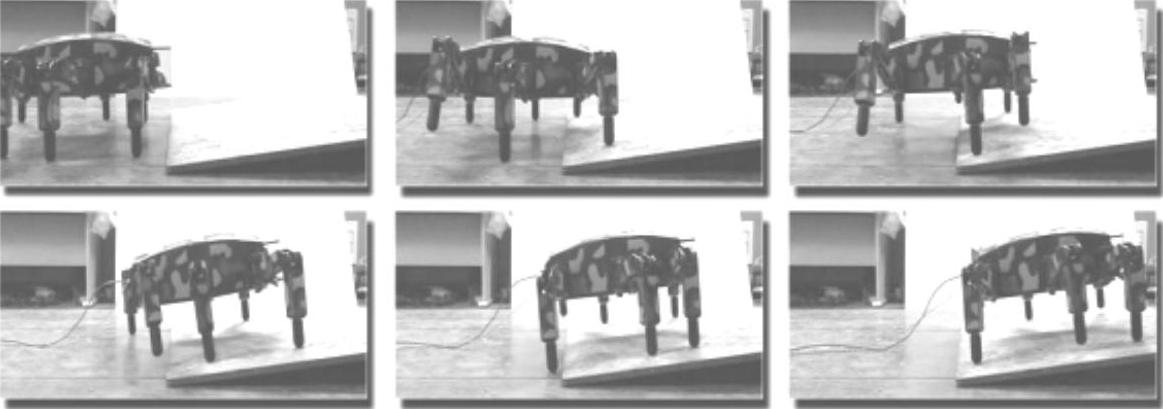
图5-77 仿生六足机器人攀爬斜坡过程
除了一般的上台阶和攀爬斜坡过程,还进行了不同高度、不同类型障碍的攀越实验,图5-78所示为下坡、下台阶、单侧越障等运动过程。实验表明,仿生六足机器人对各种障碍都有很好的适应性。当障碍物低于机器人的离地高度时机器人保持位姿不改变,仅调整足端着地点,反之机器人会根据障碍物状况调整位姿。实验过程显示仿生六足机器人在攀越障碍时运动稳定,动作协调,过程流畅,证明了基于昆虫仿生研究的运动规划策略是科学合理的,并且能够使机器人具备优秀的运动性能。
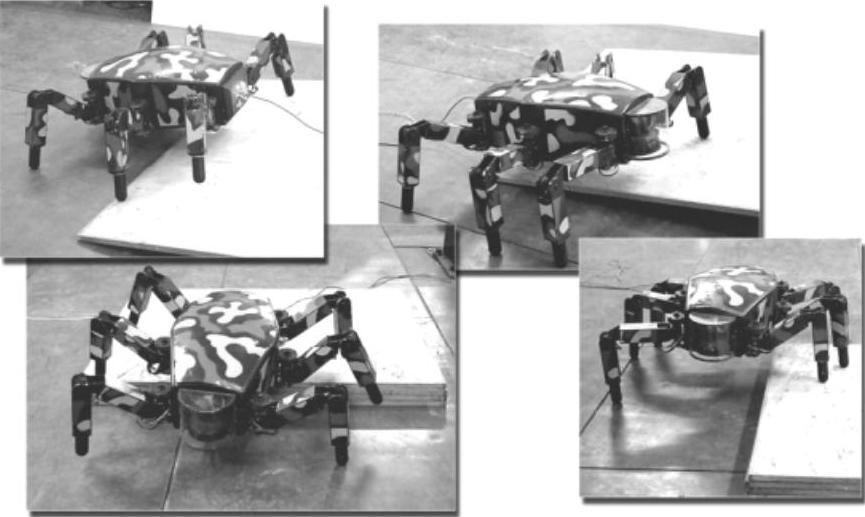
图5-78 仿生六足机器人的其他越障过程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。