



1.机器人控制系统整体方案
依照生物神经网络的功能结构,采用模块化分层递阶控制的思想设计仿生六足机器人的控制系统架构。整个控制系统由上位系统和下位系统两层结构组成,上位系统包括人的参与,体现人的意志,下位系统实现机器人底层自主控制,执行人的意图。仿生六足机器人控制系统如图5-27所示。上位系统仅包含机器人“脑核”的功能,仅需要解决人机交互问题。下位系统则包括其他所有功能,相对复杂,所以下面重点介绍下位系统的设计。
昆虫的神经系统结构简单、层次分明、功能齐全,同时体现出优良的综合性能。其原因在于神经元有着功能分化的特点,它们各司其职,同时具有有效的耦合,体现出高速的信息传递机制。因此,仿生六足机器人采用如图5-28所示的下位系统结构:以主控计算机作为系统的“大脑”,选择优秀的总线形式构建系统的“腹神经索”,从而形成机器人系统的中枢神经系统;设计电动机控制器作为系统的“运动神经元”来驱动作为系统“肌肉”的电动机(图5-27作为示意图略去了部分电动机控制器和电动机),各种传感器作为系统的“感觉神经元”和电动机控制器一起接入总线,成为整个神经网络的一部分;此外统一配备另一套“血液循环系统”——供电系统。下位系统与上位系统的通信类似于昆虫的触角探测过程——触觉信息迅速传递到“大脑”,而不经过“腹神经索”。昆虫的视觉、嗅觉等信息的传递采用同样的路径。整个仿生六足机器人控制系统具有与昆虫类似的结构,唯一不同点在于总线模拟了“腹神经索”作为“信息高速公路”的传递特点,但没有体现“腹神经索”神经节中联络神经元的自主特点,该特点体现在电动机控制器中,即将系统的“腹神经索”中的“联络神经元”放在靠近“运动神经元”的位置,两者在物理层上意义相同。
仿生六足机器人下位系统与传统单CPU的集中控制系统的不同在于:仿生六足机器人的各功能模块(包括主控计算机)都不仅是系统的一个端点,而且是具有自主性的“神经元”(主控计算机是“神经元群”,功能更为强大),所有神经元可以通过总线相互通信,从而构成庞大的神经网络。
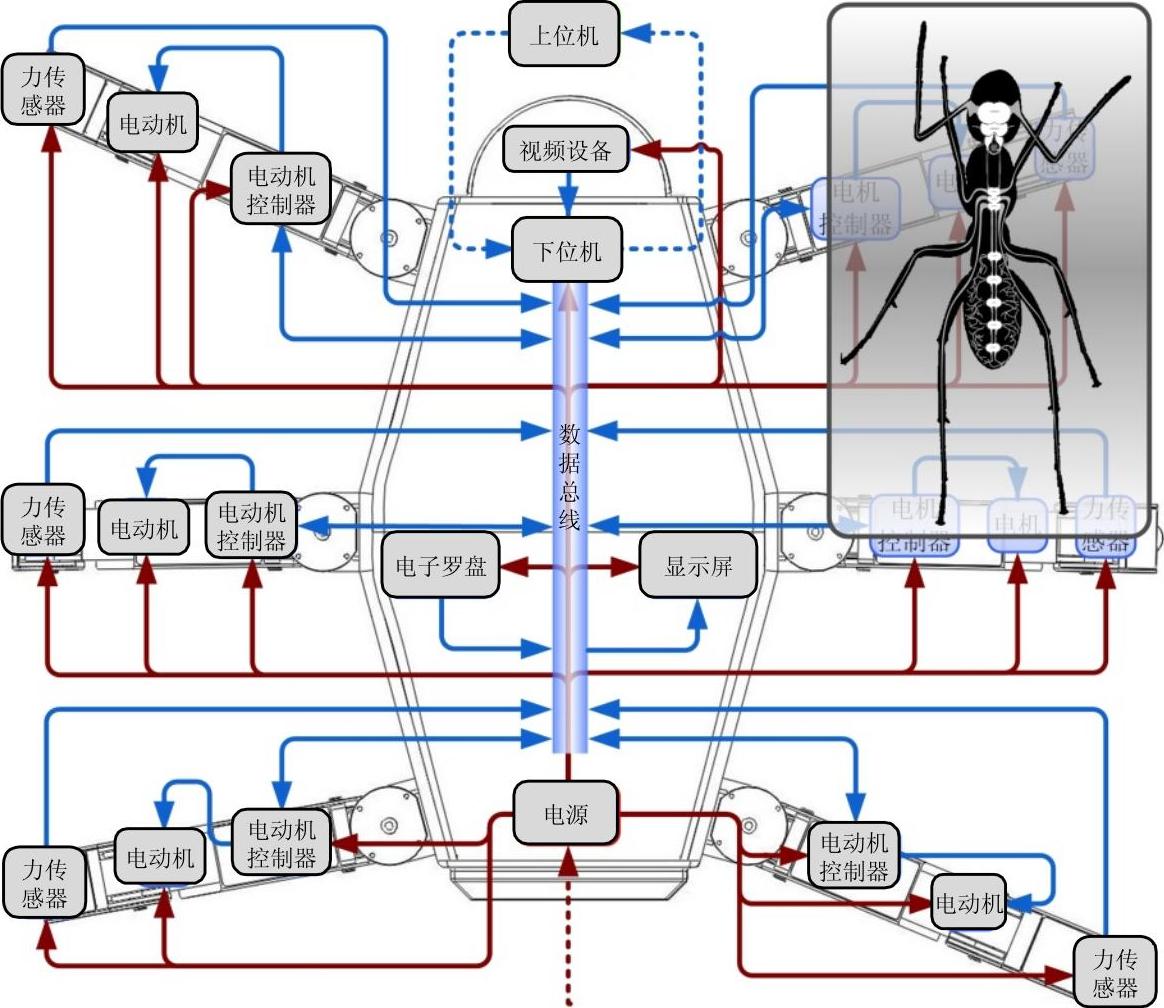
图5-27 仿生六足机器人控制系统
2.机器人控制系统硬件组成
仿生六足机器人控制系统采用上下位机的分层递阶控制模式,其硬件系统结构如图5-28所示。系统中,下位机采用基于PC104总线的小型嵌入式计算机系统,体积小,功能强,有多种数据卡可配套使用,主要由CPU板、电源板、A/D板、I/O板、CAN总线接口板和视频板组成。
下位机主板采用基于PC/104-Plus compliant架构的CPU-1461,板载256MB SDRAM,提供丰富的外设接口(包括2个串口、1个并口、4个USB口及1个10/100Mb/s以太网口等),其性能能够满足嵌入式应用的基本要求。另外,该板卡配置了4G容量、80倍速的CompactFlash卡,替代传统的机械硬盘作为存储器,它不仅功耗低、体积小、重量轻,而且读写可靠性高。
除了主板外,根据需要选择了基于PC/104-Plus compliant架构的CAN总线接口板COM-1273和视频采集卡CTR-1472。COM-1273是以两块Philips SJA1000控制器芯片为核心的双通道CAN总线接口板,支持CAN2.0B。CTR-1472是采用MPEG-4编码的四通道视频采集卡,PAL压缩速率为352×288(100f/s时)或者720×576(25f/s时),可将四个摄像机捕获的视/音频数据流进行高度压缩,并通过PCI总线进行传输。
下位机使用DC5V电源,其对电压变化相当敏感。由图5-27可见下位机与其他设备共用能源,特别是与电动机共网,而电动机在运动中会产生电压、电流的变化进而影响全网,因此需要将下位机与全网隔离。为此,下位机单独配备了功率为50W的ACS-5150稳压电源,该模块能接受DC8~40V输入并保持恒定的DC3.3V、DC5V、DC12V输出,在下位机电源输入端连接ACS-5150即可保证下位机的可靠运行。
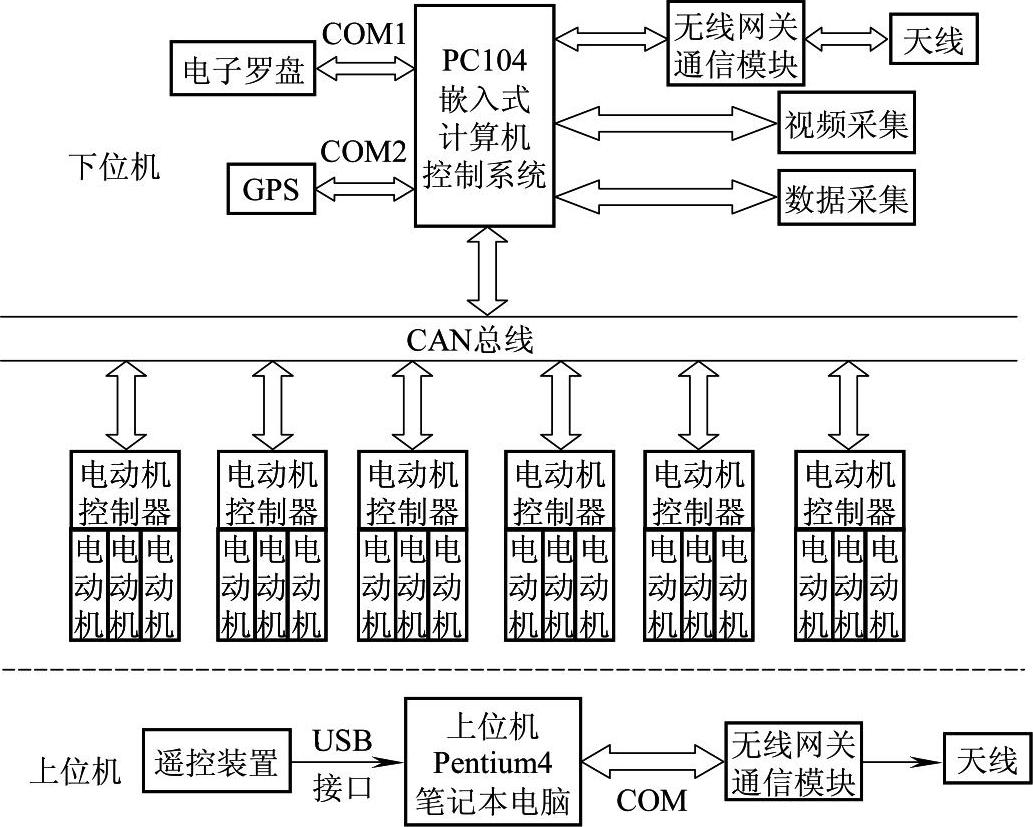
图5-28 仿生六足机器人控制硬件系统结构
上位系统由操作者和主控计算机组成,相对下位系统而言其结构较为简单,并且其功能需求也很简单——良好的人机交互能力及与下位机的通信能力。上位机采用Pentiu 4笔记本电脑,不仅成本低廉,而且符合一般操作者的使用习惯。上、下位机之间采用无线通信系统进行通信,选用了基于PCMCIA接口形式的TL-WN510G无线网卡和基于RJ-45接口形式的WRT54GC无线路由器,以实现300m距离范围内的54Mb/s低功耗、低辐射无线通信。控制系统的主要硬件如图5-29所示。
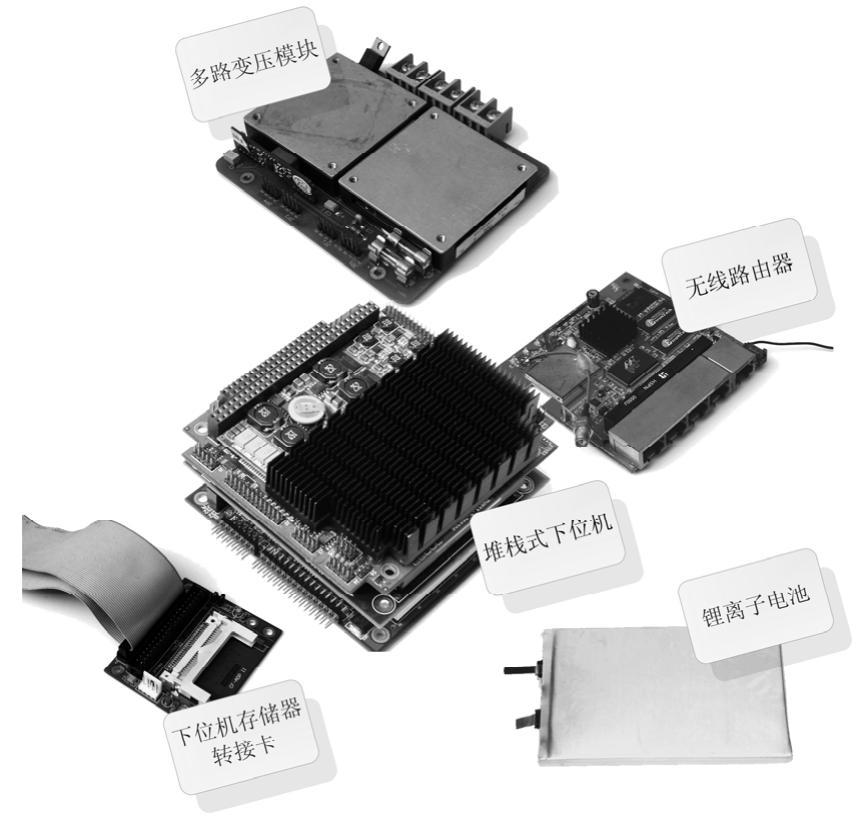
图5-29 仿生六足机器人控制系统的主要硬件
在确定了仿生六足机器人的主要硬件之后,需要考虑如何将众多的设备安置在有限的空间中,同时兼顾硬件平台的可读性和后期维护,所以,硬件系统的电气工艺性要求必然很高。仿生六足机器人采用如图5-30所示的电气图,在电气工艺上具有特点:①各设备间采用单一排线连接,该排线提供电线路和通信线路。其中CAN总线仅保留标准9针CAN总线中的CAN_H、CAN_L和CAN_GND三针;②电源、主控计算机及其他设备之间设置供电屏障,使各设备在电源使用上保持一定的独立性;③设备采用堆栈式安装方式,可靠性高,层次清晰,通风散热性好;④所有设备采用无风扇设计,功耗低。大发热量设备的散热片紧贴机身,利用机器人机身作为扩展散热片;⑤硬件的合理布局保持了机器人质量均衡,同时便于设备的控制和维护。
整套硬件系统在满足仿生六足机器人功能要求的同时,很好地兼顾了小体积、轻质量、低功耗、高速运算、无线操作、实时通信、方便扩展等设计需求,为仿生六足机器人体现优良的运动性能打下很好的基础,也为运动控制算法的实现提供了很好的平台。
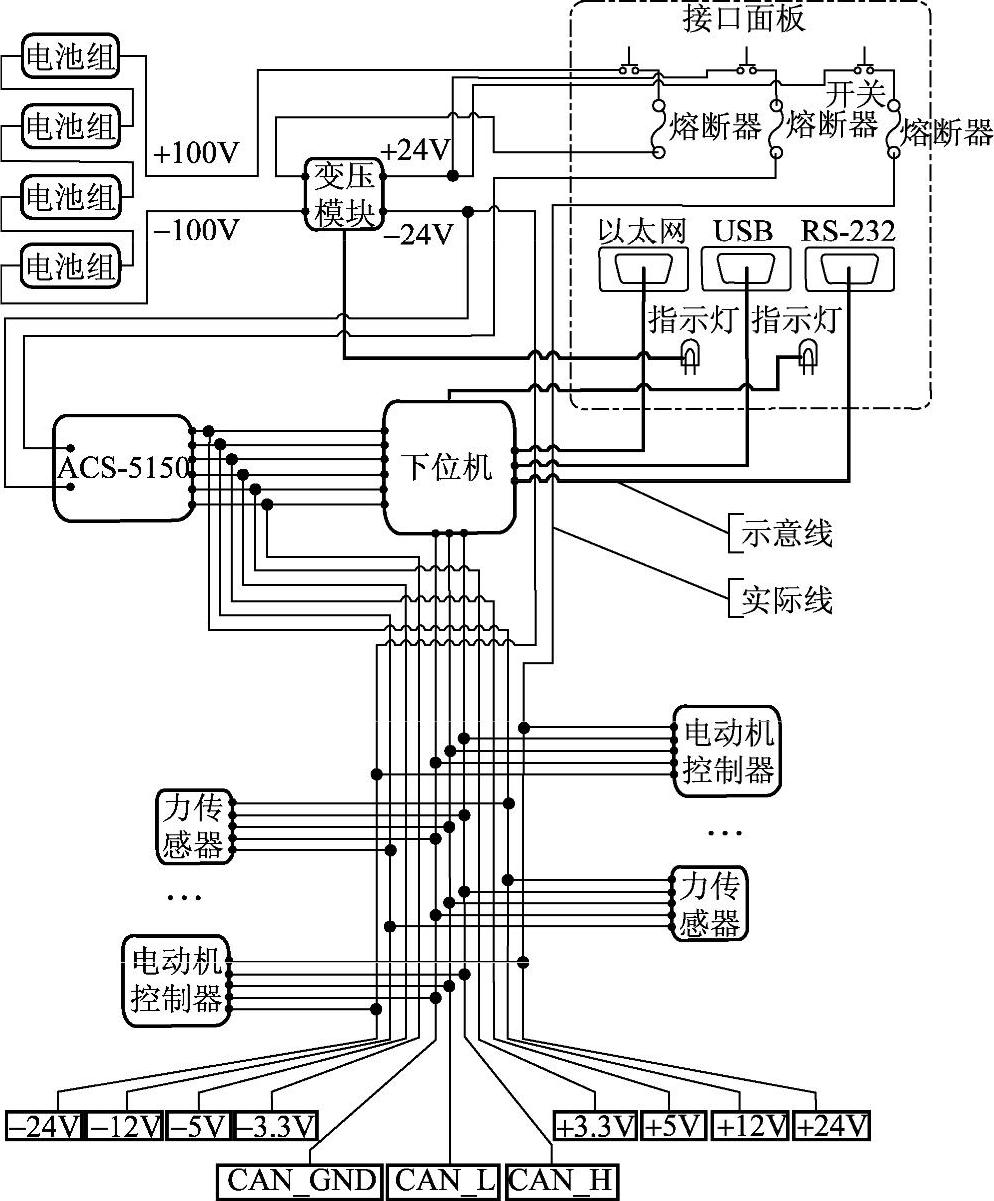
图5-30 仿生六足机器人电气图
3.机器人控制算法设计
仿生六足机器人的仿生控制系统模仿了昆虫的神经系统网络,设计了“大脑”、“神经元”及与大脑分离的“脑核”。围绕着“脑核”、“大脑”和“神经元”所分别对应的高层、中层和底层智能层次,仿生六足机器人各部分需要实现相应的神经控制功能:
1)上位机需要理解操作者的高层指令,并完成相应的处理任务。
2)下位机需要完成高层指令解读、环境状况监测和底层申请处理三个主要任务。
3)电动机控制器需要完成电动机运动底层规划和电动机运动控制这两个任务。
其中,中层智能和底层智能的实现是仿生六足机器人实时在线运动控制的关键。
作为高层和底层的连接桥梁,下位机解读高层指令并执行,它是仿生六足机器人实时在线运动控制的基础。在前述的控制系统结构中,所有的传感器都与下位机相连,因此下位机通过传感信息来监测环境状况从而指导机器人的运动。作为“神经元”的电动机控制器能完成简单的运算和控制作业,但不能在机器人宏观模型的基础上规划关节的运动,因此针对仿生六足机器人选择这样一种思路:由电动机控制器提出运动规划申请,而下位机根据申请执行运动规划。这种思路不仅充分发挥了下位机和电动机控制器各自的硬件性能,而且便于针对机器人多足的特点对其进行条理清晰的运动规划,仿生六足机器人基于模型的控制策略也体现在此。
电动机控制器作为“运动神经元”要能很好地驱动和控制电动机。另外,前面提到,电动机控制器具有腹神经索的“联络神经元”的功能。因此,电动机控制器类似于昆虫的体神经节,能够完成电动机运动的底层规划,例如关节的节律运动,仿生六足机器人基于生物控制的策略体现在此处。
根据上述任务描述,基于已经实现的仿生六足机器人的硬件平台,设计了如图5-31所示的运动控制算法体系。上位机包括人机交互界面和高层指令收发器;与功能需求对应,下位机包括高层指令字典、传感信息栈和运动规划运算库,三者相互衔接,互为参考,其中高层指令字典面向上位机完成指令映射,而运动规划运算库面向电动机控制器完成电动机控制器提出的运算申请;底层的电动机控制器包括步态生成器和关节控制器,其中步态生成器模块与其他电动机控制器的步态生成器模块相互通信和协调,以完成机器人时间域的运动规划,而各个关节控制器依靠下位机的运动规划运算库执行机器人空间域的运动。(https://www.xing528.com)
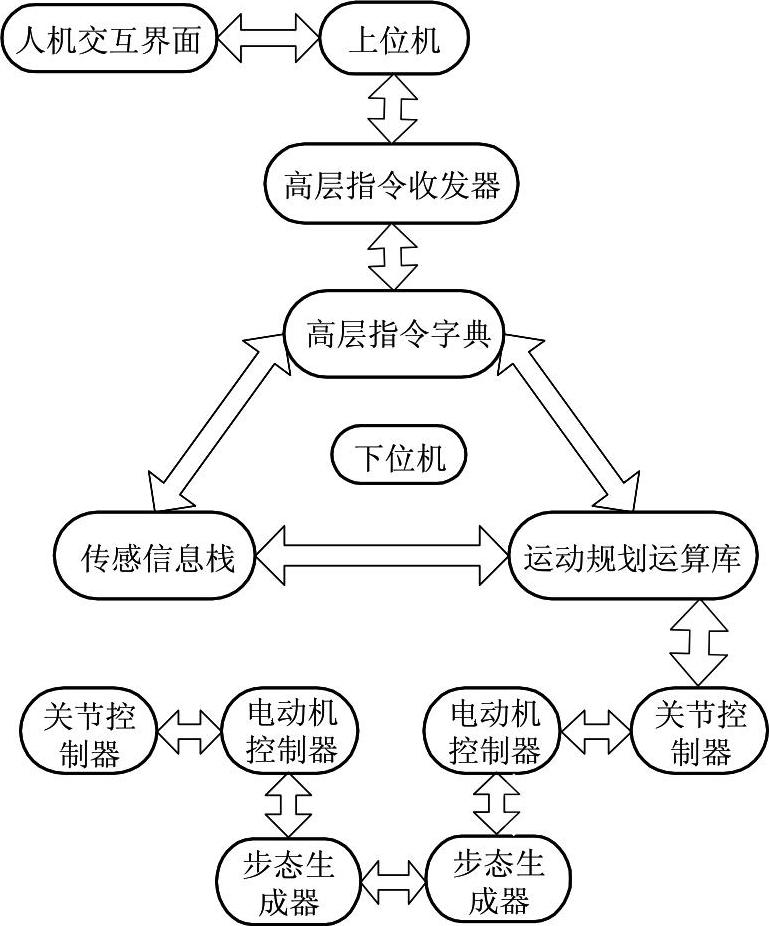
图5-31 仿生六足机器人运动控制算法体系
上述算法体系层次分明,结构清晰,功能分配合理,宏观上为仿生六足机器人实时在线运动的实现奠定了良好的基础。
通过学习昆虫的CPG机制来实现机器人的协调、自然的变速运动是一个可行的途径。从工程的角度来看,CPG神经电路可以看作是由一组互相耦合的非线性振荡器组成的分布系统,其通过相位耦合实现节律信号的发生,而改变振荡器之间的耦合关系可以产生具有不同相位关系的时空序列信号,实现不同的运动模式。
借鉴以往在机器人上应用CPG机制的正反两方面的经验,基于蝾螈机器人振荡器模型,为仿生六足机器人设计了如图5-32所示的CPG网络,其非线性振荡器的数学表达式为
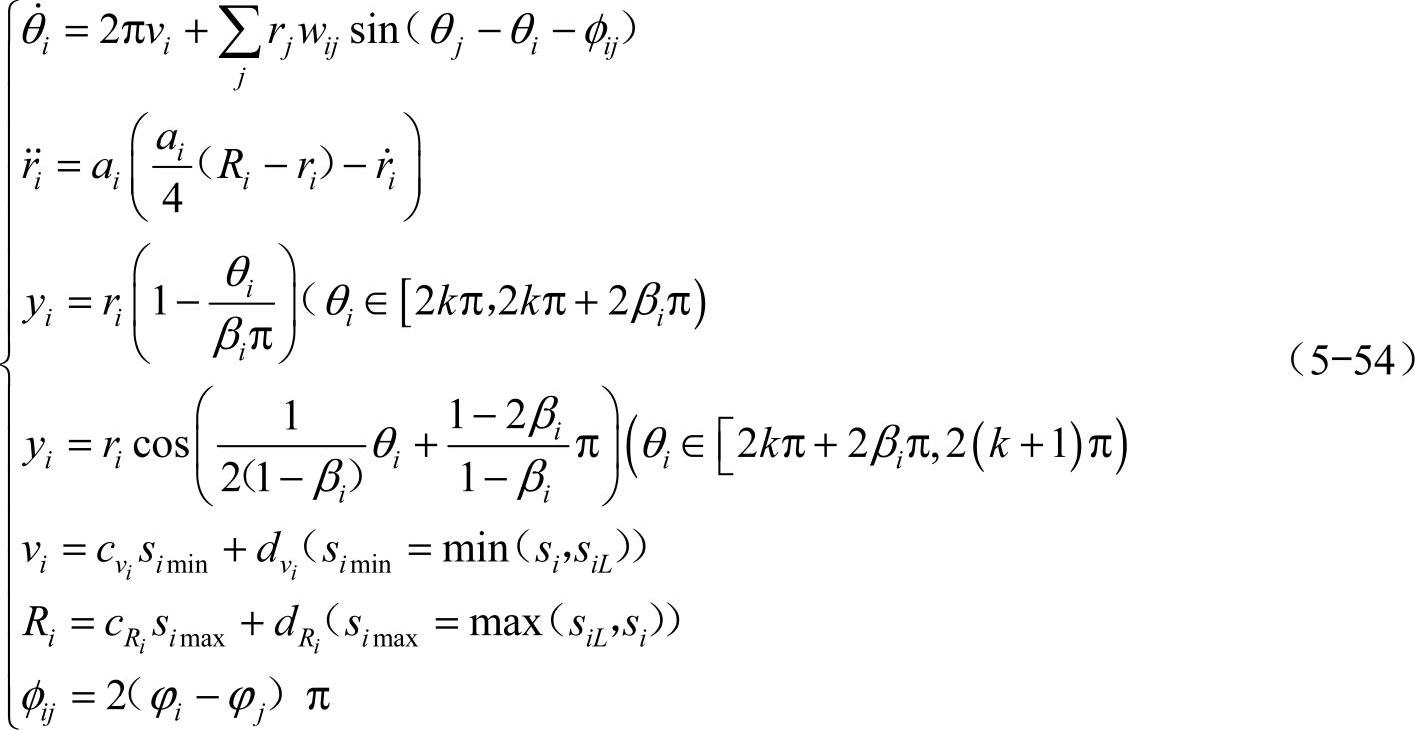
式中,βi和ϕi分别为第i足的有荷因数和相位;siL为第i个神经元的外部激励阈值。θi和ri分别代表第i个神经元的相位和幅值;vi和Ri分别代表第i个神经元的固有频率和幅值;ai为幅值逼近速度常数;φij代表第i个神经元和第j个神经元之间的相位差;vi和Ri与外部激励si成线性关系,比例系数分别为 和
和 ,偏移分别为
,偏移分别为 和
和 。
。
该模型的特点主要有:
1)突破“屈肌—伸肌”模型的限制,并简化18个关节的相位耦合关系,只为6个根关节分别设置一个非线性振荡器,组成振荡环路,不仅大大简化了模型,而且为模型在空间域的应用奠定了基础。
2)外部激励强度与机器人的期望速度成正比,振荡器输出近似为根关节位移。
3)振荡器输出曲线函数引入了有荷因数,当足处于支撑相时近似取直线,当足处于摆动相时近似为余弦曲线,符合足运动时根关节的运动特征。
4)模仿昆虫运动,当速度低于某设定阈值时为变频不变幅运动(步行周期变化而步长不变),反之则为变幅不变频运动。
5)能够生成满足要求的不规则步态。
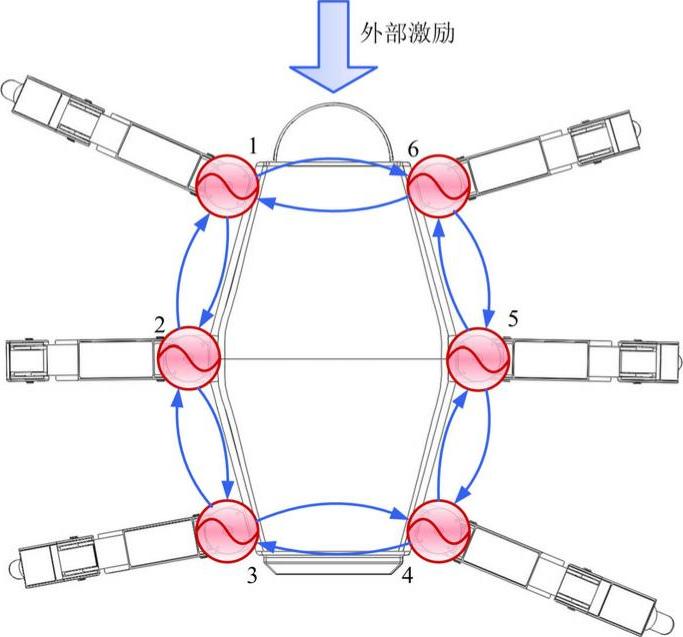
图5-32 仿生六足机器人CPG网络模型
取ai=20, ,
, ,
, ,
, ,
,
以及神经元连接权重矩阵
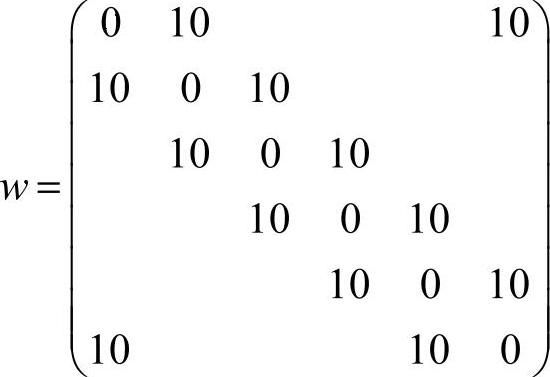
可获得随外部激励变化的各振荡器输出曲线,如图5-33所示。
图5-33 各振荡器输出曲线
仿真结果显示,当期望机器人保持静止时,各足的根关节从当前位置逐渐移动到运动初始位置,然后保持位姿直到期望速度改变;随着期望速度逐渐提高,根关节的运动周期逐渐缩小,但是周期内转动角度保持不变,同时支撑相时间较长,其关节运动近似为直线,而摆动相时间较短,其关节运动近似为余弦曲线;当期望速度超过设定阈值时,根关节的运动周期保持不变,而周期内转动角度逐渐增大;当期望速度为常数并低于速度阈值时,根关节运动切换为周期运动,同时支撑相和摆动相严格遵循机器人的步态表达式。整个运动过程连续,运动状态的切换平滑,可以让机器人像昆虫一样自然、协调地变速运动,证明了所设计的CPG模型适合仿生六足机器人的变速控制。
该模型结构简单,信息容量大,包含了时间域和空间域的信息,并且可以方便地修改振荡器输出,从而进一步扩展其应用范围。
确切来说,在允许机器人足端轨迹存在一定误差的情况下,使用该模型的振荡器输出信号控制机器人根关节运动可以达到很好的效果,但是若要求关节运动精度很高,则只能部分地使用该模型。为此,在仿生六足机器人上应用CPG模型时采取了如下机制:
1)借助现有硬件平台,通过软件方式实现神经元振荡。在6个根关节电动机控制器中嵌入CPG振荡器代码,各个神经元通过CAN总线相连以实现耦合,下位机通过CAN总线传输全局的外部激励。
2)单足的神经元振荡输出信号的斜率由正变负时(表征足切换为支撑相),电动机控制器向下位机提交相位状态,下位机将该足纳入实时规划队列,并规划该足各关节处于支撑相的运动轨迹。
3)单足的神经元振荡输出信号的斜率由负变正时(表征足切换为摆动相),电动机控制器向下位机提交相位和幅值信息,并提出摆动相轨迹规划申请,下位机按照足端轨迹规划方法先规划出理想的足端运动轨迹,解算出髋关节和膝关节的轨迹曲线,然后将其下传到相应的电动机控制器。
基于上述机制的仿生六足机器人并未因为变速运动的要求而影响其实时在线运动的性能,反而因精简了运算、降低了运动精度和控制难度,提高了机器人的实时在线性能。另外,采用软件方式实现神经元振荡可以很方便地调整参数,避免了硬件电路实现方式的缺点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。