



1.机器人的机构模型及其自由度
机构设计是仿生六足机器人系统设计的基础,整机机械结构、自由度数、驱动方式和传动机构等都会直接影响机器人的运动性能和动力性能。同时,仿生六足机器人机构设计除了需要满足系统的技术性能外,还需要满足经济性要求,即必须在满足机器人的预期技术指标的同时,考虑用材合理、制造安装便捷、价格低廉及可靠性高等问题。
仿生多足步行机器人的机构由躯体和腿部两部分组成,其中腿的数量及其配置是整体设计的关键。现有多足步行机器人的足数包括三足、四足、六足、八足甚至更多,足的数目较多适合重载和慢速运动,而足数少时运动更加灵活。影响步行机器人足数选择的主要因素为:稳定性、节能性、冗余性、关节控制性能的要求、制造成本、重量、所需传感器的复杂性及可能的步态等。腿的配置是指步行机器人的足相对于机体的位置和方位的安排,确定分布形式时,还需考虑一些细节问题,如腿在主平面内的几何构形(哺乳动物形、爬行动物形、昆虫形)和腿杆件的相对弯曲方向等。
在对步行机器人足数与性能定性评价的基础上,所设计的步行机器人采用六足结构,既能保证高速静态稳定行走能力和负载能力,又考虑了机械结构和控制系统的简单性。通过对蚂蚁、蟑螂等昆虫的观察分析,发现昆虫具有出色的行走能力和负载能力,因此步行机器人腿的配置采用正向对称分布,并且腿在正主平面内的几何构形采用昆虫形。仿生六足机器人的机构模型如图5-16所示。
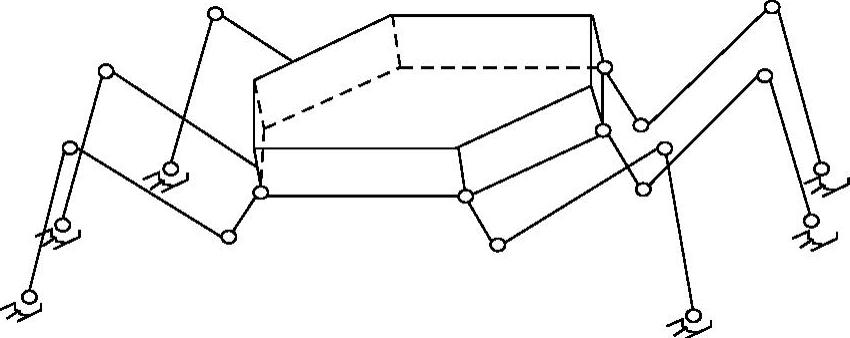
图5-16 仿生六足机器人的机构模型
仿生六足机器人的步行方式通常采用三角步态。三角步态中,六足机器人身体一侧的前足、后足与另一侧的中足共同组成支撑相或摆动相,处于同相的三条腿的动作完全一致,即三条腿支撑,三条腿抬起换步。抬起的每条腿从躯体上看是开链结构,相当于串联手臂,而同时着地的3条腿或6条腿与躯体构成并联多闭链多自由度机构。步行机器人在正常行走条件下,各支撑腿与地面接触存在摩擦不打滑,可以简化为点接触,相当于机构学上的三自由度球面副,再加上踝关节、膝关节及髋关节(各关节为单自由度,相当于转动副),每条腿都有6个自由度。
假设步行机器人任一时刻处于支撑相的腿数为n(n≤6),则此时模型为具有n个分支的空间多环并联机构,其自由度可按式(5-9)进行计算

式中 p——运动副数,p=4n;
fi——第i个运动副具有的自由度数,fi=1(i=1~3n),fi=3(i=3n+1~4n);
L——独立封闭环数,L=n−1;
λi——第i个独立封闭环所具有的封闭约束条件数,λi=6;
fp——消极自由度数,fp=0;
F1、λ0——分别为局部自由度数和重复约束数,F1=0,λ0=0。
将以上参数代入式(5-9),可得
F=3n+3n-(n-1)×6=6 (5-10)
由此可知,无论仿生六足机器人有几条腿处于支撑相,整个机构是具有6个自由度的空间多环并联机构,只是有时是3分支并联机构,有时是6分支并联机构。从机构学角度看,仿生六足机器人就是3分支并联机构、6分支并联机构及串联开链机构之间不断变化的复合型机构。同时,式(5-10)也说明,无论该步行机器人采取的步态及地面状况如何,躯体在一定范围内均可灵活地到达任意位置,并呈现要求的姿态。
2.机器人本体设计
为了便于加工及安装控制元器件,多足步行机器人的机体常采用箱形刚体结构。通过对自然界多足动物的细心观察,发现许多昆虫的腿的分布情况往往如图5-17所示,足部大多落在图中椭圆范围内。因此,仔细研究了机器人立足点在水平面上的铅垂投影点构成的支撑图形,以寻找其中的原因。

图5-17 昆虫足部位置示意图
为了行走稳定起见,仿生六足机器人在行走过程中,机体重心的投影必须落在三条支撑足的支撑点所构成的三角形区域内,因为当重心靠近边界时,会使机器人的稳定性急剧降低。重心投影到支撑图形边界垂直距离的最小值定义为稳定裕量,因此关键问题是如何设计机体形状才能保证其获得最大的稳定裕量,即获得最佳稳定性能。对机体为长方形和近似菱形的两种步行机器人进行了运动学仿真,两种机体对应的支撑三角形分别如图5-18和图5-19所示,仿真结果表明近似菱形机体的步行机器人具有两方面明显的优势:一是减少了腿部之间的碰撞;二是增加了机体的稳定性。(https://www.xing528.com)
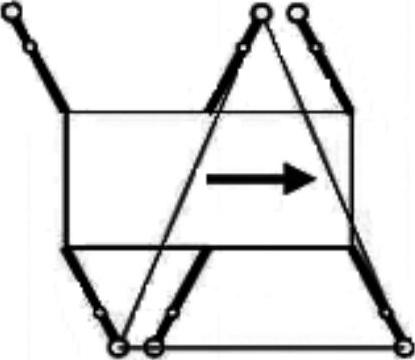
图5-18 长方形机体对应的支撑三角形
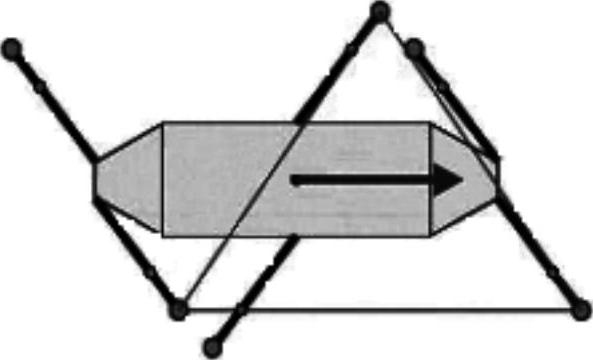
图5-19 近似菱形机体对应的支撑三角形
因此,在设计仿生六足机器人的机体时,采用了近似椭圆形的框架结构,除了以上两方面的优势外,还增大了机器人腿部的转动空间。制造时,机器人的机体使用高强度铝合金为原料,以减轻机器人重量。躯体内部预留安装空间及安装孔,便于控制元器件、视觉系统、电源模块等的安装及走线。同时,因该机器人六条腿的根部与机体相连,还需考虑整体布局与安装定位。图5-20为仿生六足机器人机体的三维实体模型。
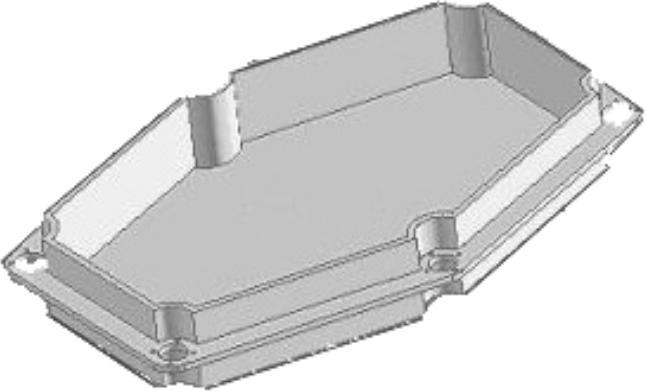
图5-20 仿生六足机器人机体的三维实体模型
3.机器人腿部设计
腿部机构是机器人的重要组成部分,也是仿生六足机器人机械设计的关键之一。腿机构设计的基本要求可以归纳为以下三点:
1)实现运动的要求:从步行机器人的行走性能出发,一方面要求机体能走出直线运动轨迹或平面曲线轨迹,另一方面要求能够灵活转向,因此腿的机构应为不少于三个自由度的空间机构,并且足端应具备一个实体的工作空间。
2)承载能力的要求:机器人的腿在行走过程中交替地支撑机体的重量并在负重状态下推进机体向前运动,因此必须具备与整机重量相适应的刚性和承载能力。
3)结构实现和方便控制的要求:从结构设计的要求看,腿部机构不能过于复杂,杆件过多会导致结构庞大和传动困难。
通过仿生观测实验可知,自然界中昆虫的腿部结构大致如图5-21所示,基节、股节和胫节三部分分别绕着跟关节、髋关节和膝关节做单自由度旋转运动,属于一个RRRS型开链机构。采用相似的三自由度关节式腿机构,所设计的仿生六足机器人的腿部结构如图5-22所示。各关节由电动机、减速器和锥齿轮共同驱动,以便用简单的结构获得较大的工作空间和灵活度。通过控制相应关节电动机的运动使机器人具备了18个自由度,能够实现机器人步行足在可达域内任意一点的自由定位,在结构上保证了能够有效地模拟昆虫的行走方式完成相对复杂的运动。仿生六足机器人整机虚拟样机模型和原理样机分别如图5-23和图5-24所示。
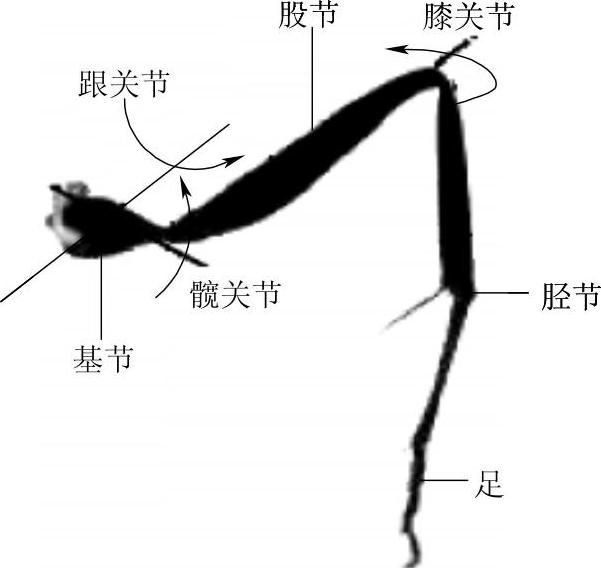
图5-21 昆虫的腿部结构

图5-22 仿生六足机器人的腿部结构

图5-23 仿生六足机器人虚拟样机

图5-24 仿生六足机器人原理样机
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。