



在仿生学研究的基础上,设计并研制了一种新型小尺寸、轻体重、多关节、多运动步态的节肢型机器人,装备着多达40个的高精度直流伺服电动机和大角度精密转角舵机,使之在非结构化环境下的多样式、多步态行走,具备轮式、腿式、履带式机器人的综合优点。充分结合轮式机器人、多足机器人等运动特点及电路设计特点,将多种运动模式、多种运动姿态完美结合,达到流畅的完成复杂轮式运动,又可以在各足尖点可达范围内灵活调整行走姿态,并合理选择支撑点保持稳定。
在设计中,采用Pro/E软件精心设计了机器人的机械结构,并对相关零部件的机械强度、运动特性进行了深入分析,构建了新型节肢机器人步态控制的理论模型,通过对机器人运动学正解与运动学反解的严密推导,以及对机器人多样式、多步态行走特点的深入分析,掌握了新型节肢机器人步态控制的理论方法与技术途径。经新型节肢机器人样机运动功能的实际测试证明,该机器人凭借独特的机械设计与合理的步态规划,可在复杂地形条件下以多样式、多步态高效行进,充分证明作品在理论探索和技术实现方面的有效性。
新型节肢机器人既有机器的轮式运动特色,又有生物的腿式运动方式,真正实现了机械与生物的结合,避免了纯粹僵硬的机械运动或者是单一刻板的生物模仿,真正吸取了两方面的优势,提高了机器人的运动方式的多样性和兼容性,以求达到完美的运动效果。鉴于新型节肢机器人具备体积小,运动方式灵活多变,地形适应能力强,控制方便,在军事侦察、敌情勘测、工业生产、科技教学与研究、家庭服务和医疗等领域得到广泛的应用,同时,以新型节肢机器人为代表的高性能仿生机器人,具有在家庭机械宠物娱乐机器人和科技馆开展科普教育活动等方面广阔的应用前景。
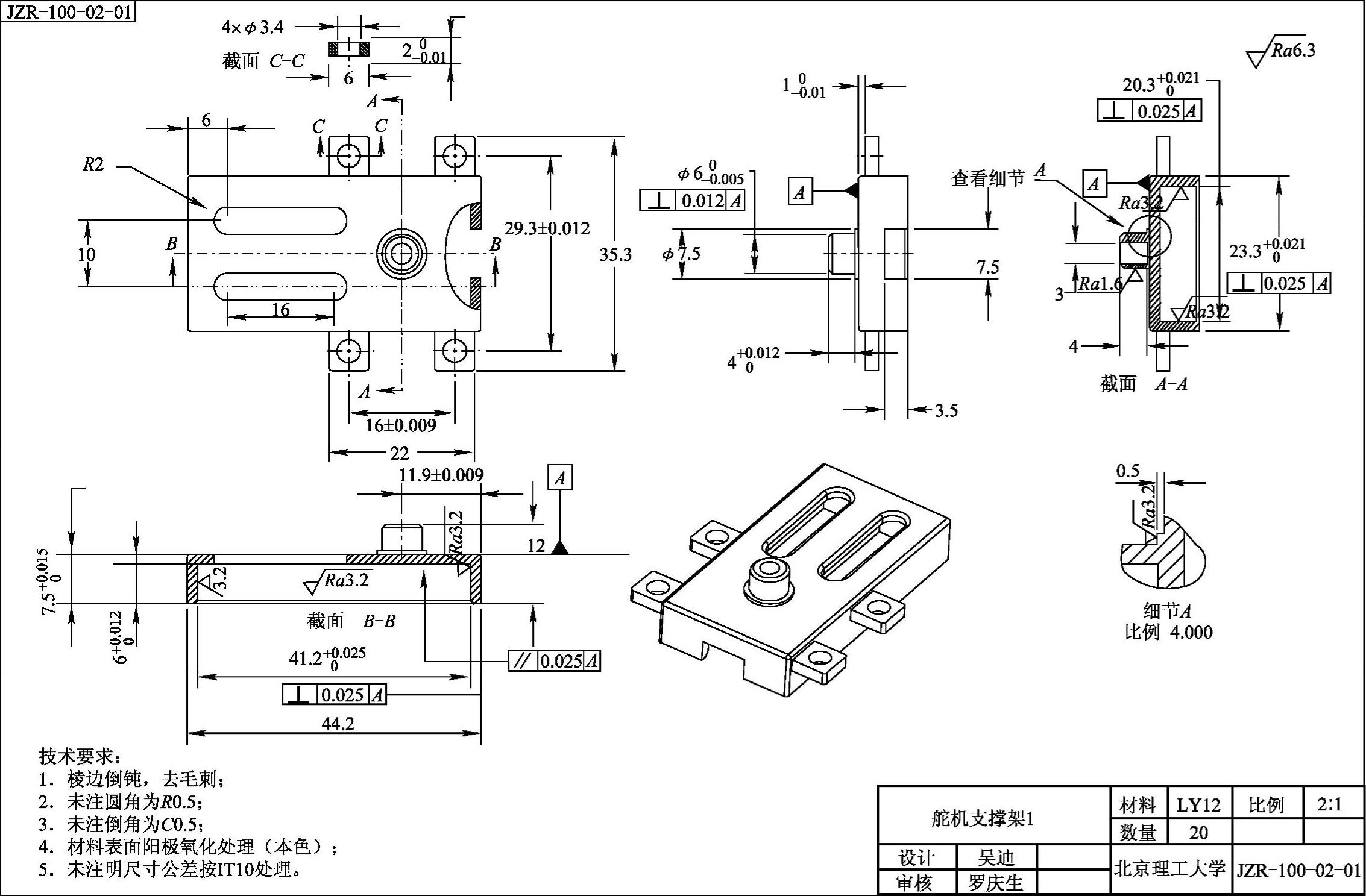
最后附上部分零部件的机械图样,分别如图4-36~图4-39所示。
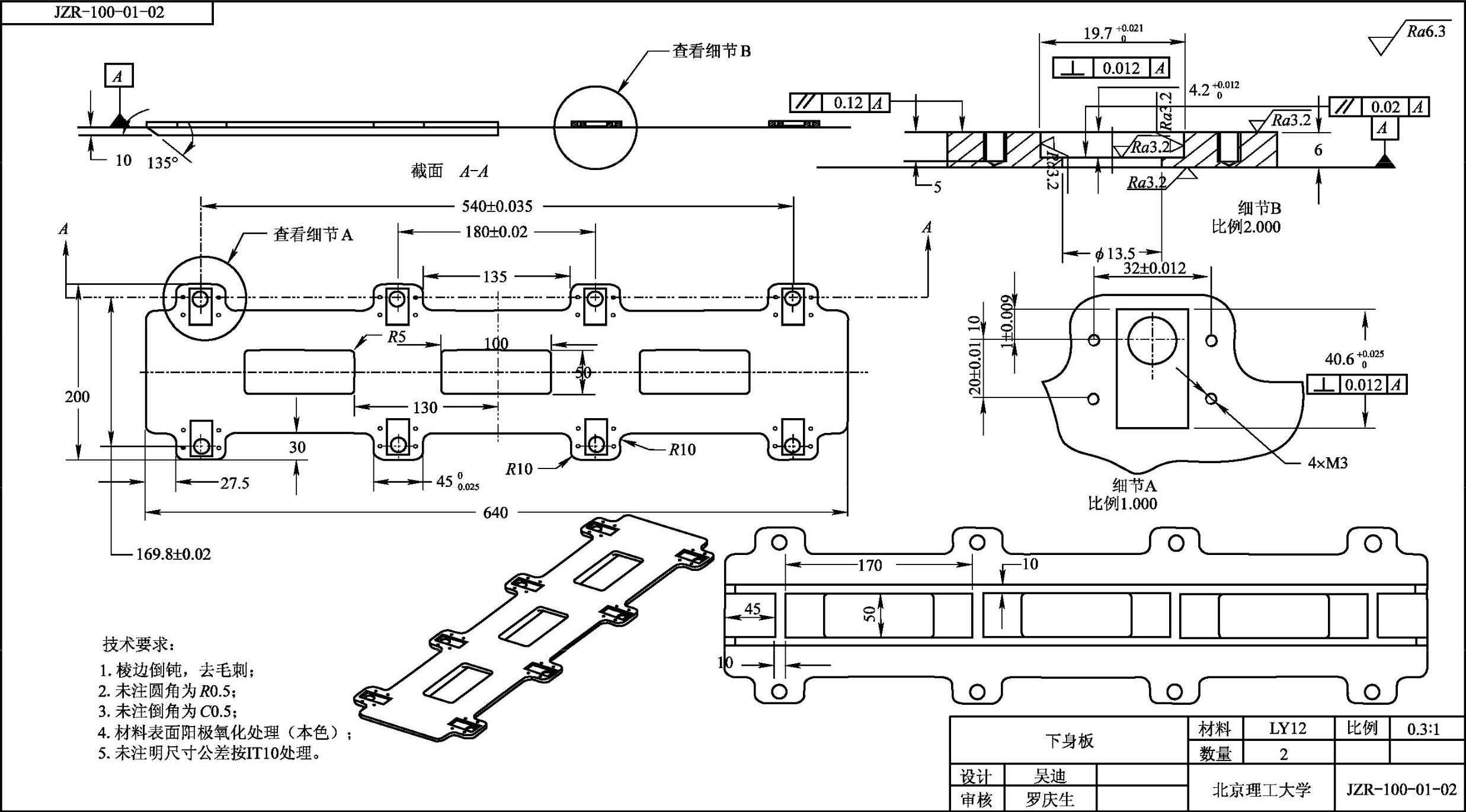
图4-36 下身板
 (https://www.xing528.com)
(https://www.xing528.com)
图4-37 舵机支撑架1
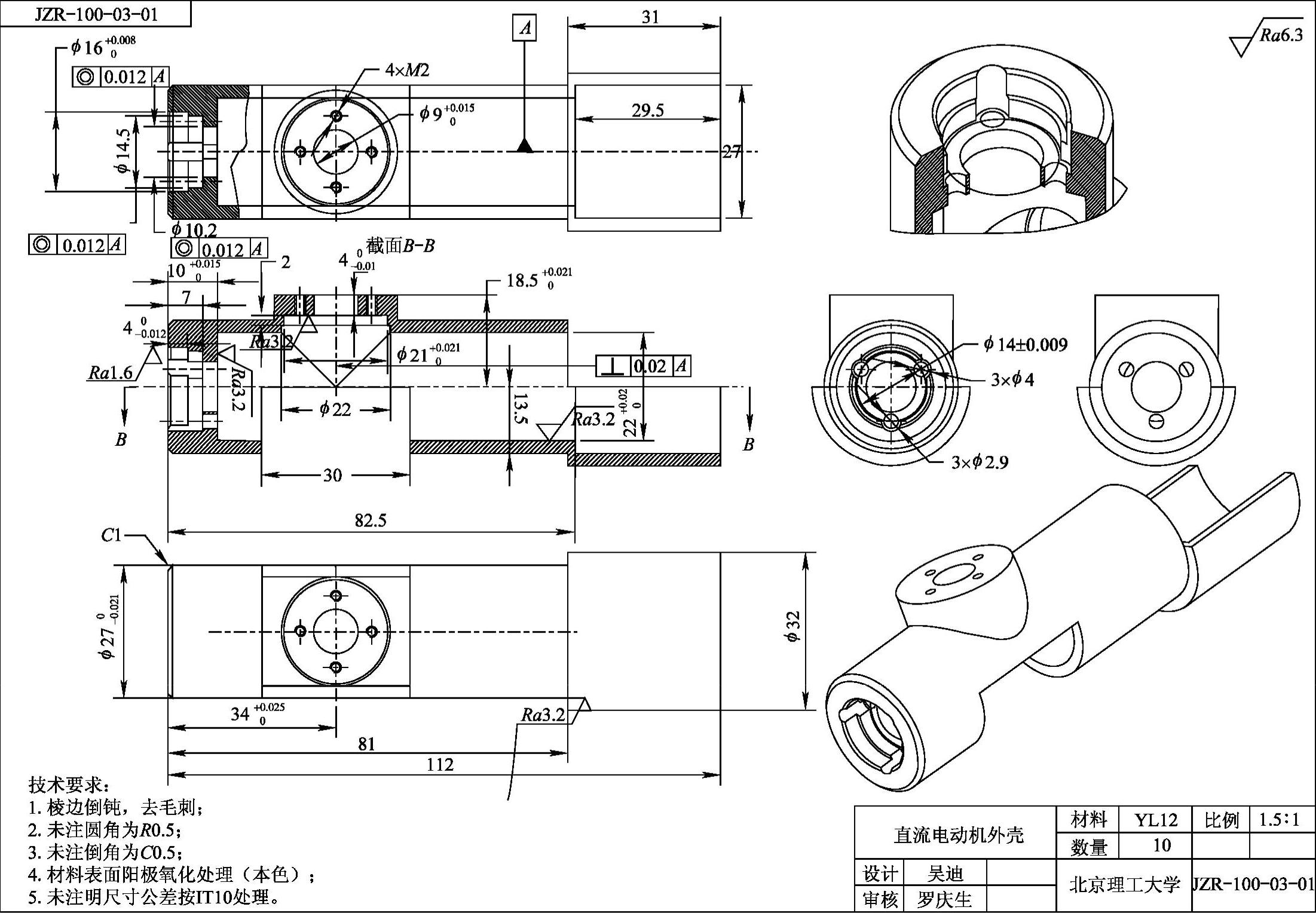
图4-38 电流电动机外壳
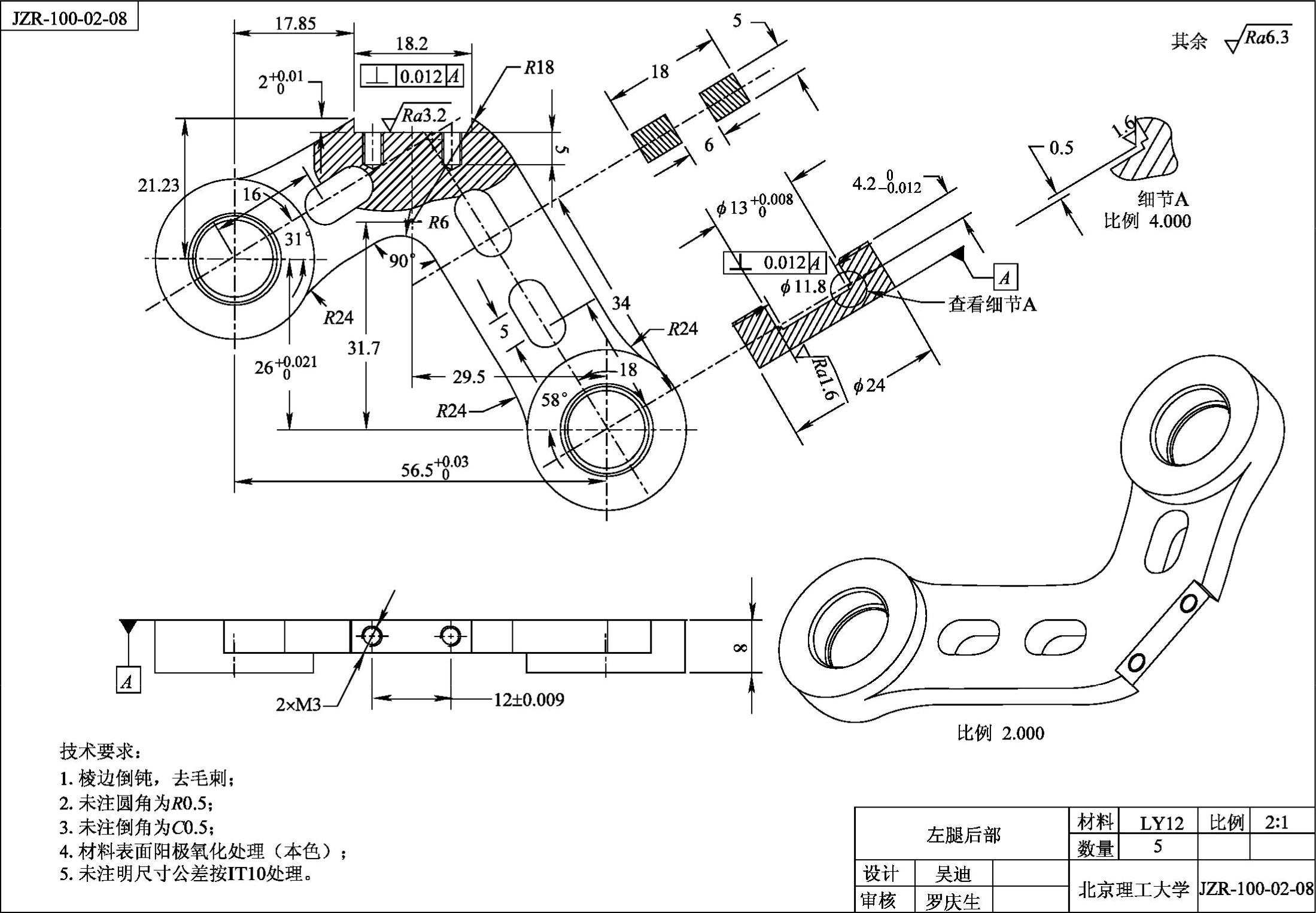
图4-39 左腿后部
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。