



新型节肢机器人反馈及传感模块由加速度传感器MMA7361、具有温度补偿的数字化超声波传感器和高清摄像头模块组成。加速度传感器检测机器人在xyz三个方向的加速度,为处理控制核心控制机器人改变姿态以适应各种地形提供机器人姿态信息。超声波传感器和摄像头用于障碍物检测和视觉系统构建,其中超声波传感器获得机器人与周围障碍物或者目标障碍物之间距离,使得新型节肢机器人具有自动避障功能和目标测距功能。高清摄像头能够获取机器人前方180°范围内的视频图像,通过无线通信模块将视频图像传输至上位机实现对环境勘测和操作人员对机器人的远程遥控。
(1)加速度传感器 加速度传感器利用压电效应原理制成。所谓的压电效应就是对于不存在对称中心的异极晶体加在晶体上的外力,除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应。加速度传感器就是利用了其内部的由于加速度造成的晶体变形这个特性。由于这个变形会产生电压,只要计算出产生电压和所施加的加速度之间的关系,就可以将加速度转化成电压输出。加速度传感器如图4-27所示。
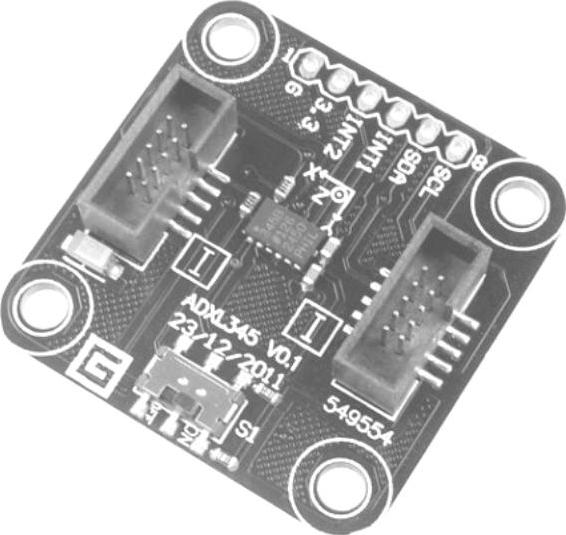
图4-27 加速度传感器
(2)超声波传感器 超声波传感器是利用超声波的特性研制而成的传感器,由发送传感器(也称为波发送器)、接收传感器(也称为波接收器)、控制部分与电源部分组成。发送器传感器由发送器与使用直径为15mm左右的陶瓷振子换能器组成,换能器作用是将陶瓷振子的电振动能量转换成超能量并向空中辐射;而接收传感器由陶瓷振子换能器与放大电路组成,换能器接收波产生机械振动,将其变换成电能量,作为传感器接收器的输出,从而对发送的超声波进行检测,而实际使用中,用于发送传感器的陶瓷振子也可以用做接收器传感器的陶瓷振子。控制部分主要对发送器发出的脉冲链频率、占空比及稀疏调制和计数及探测距离等进行控制。超声波传感器电源(或称信号源)可用DC(12±10%)V或(24±10%)V。超声波传感器如图4-28所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-28 超声波传感器
(3)摄像头模块 摄像头常分为彩色和黑白两种摄像头,主要工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号端输出。摄像头模块如图4-29所示。
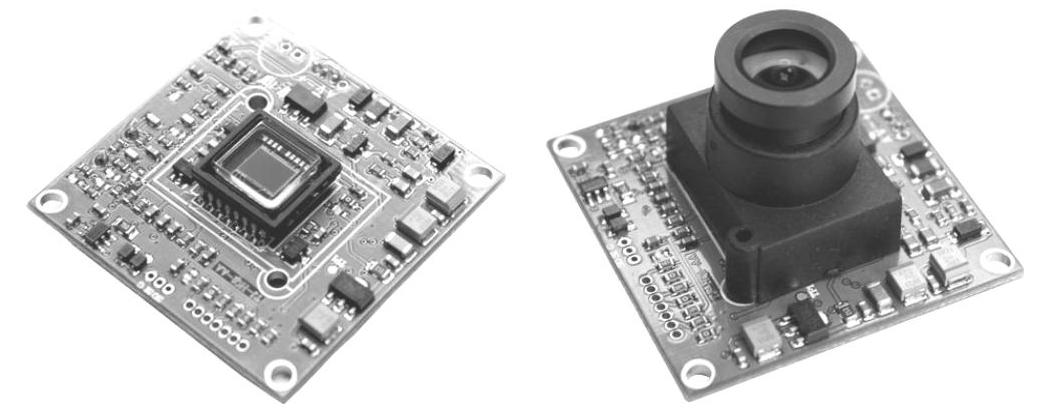
图4-29 摄像头模块
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。