



新型节肢机器人有五类基本运动方式:昆虫的多足爬行、螃蟹的横向侧行、仿人的腿式行走、蛇式的匍匐前进、机车的轮式滚动。五类基本运动方式中每一类都包含多种步态,并可对基本运动方式进行组合,可实现复合式步态。
为实现五种基本步态的互相变化和保证每种步态的精确性和流畅性,新型节肢机器人采用了少有的8足设计,而不是常见的6足设计。通过步态规划,将使新型节肢机器人在任意时刻都能保证至少有四条腿与地面接触,从而大大地增加了自身稳定性,为做出更为复杂的步态动作提供了稳定性的保证。
新型节肢机器人虚拟样机结构如图4-6所示,其八个运动足均设置为五自由度,采用具有四个转动关节、一个作为足部的直流电动机和具有特定角度的曲臂结构的独特设计,使得运动足的着地端能在其可达域的三维空间中任意位置落地,便于控制足部运动。为了达到运动要求,每只运动足上有4个大角度精密转角舵机和1个高精度直流伺服电动机,全身共40个电动机使新型节肢机器人能够实现最大40自由度的同步运动,为步态的实现提供了足够的自由度,同时通过对电动机的精确控制可以使新型节肢机器人的步态更加的逼真和流畅,实现理想的仿生的效果。
运动足自由度设计如图4-7所示。运动足的上部由四个关节组成,分别由直流角位移伺服电动机内部的驱动模块驱动,构成了新型节肢机器人主要运动结构;运动足的底部设置为一台直流电动机,用于驱动轮式足,使机体获得轮式滚动的运动方式;安装直流电动机的圆柱形结构是作为运动足的步行足端部,可使机体以腿式步行的运动方式适应多种不同的地形环境。

图4-6 新型节肢机器人虚拟样机结构
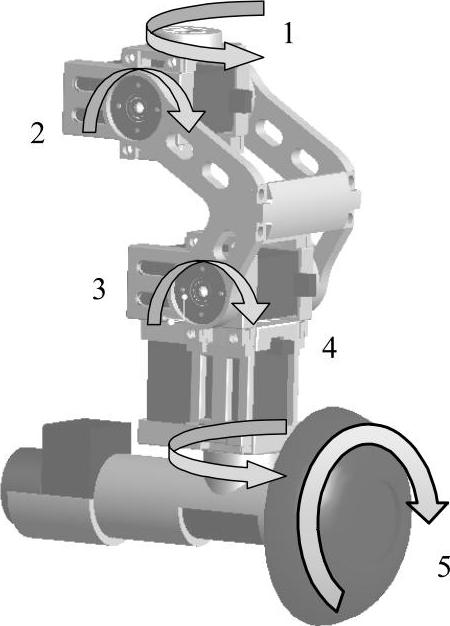
图4-7 运动足自由度设计
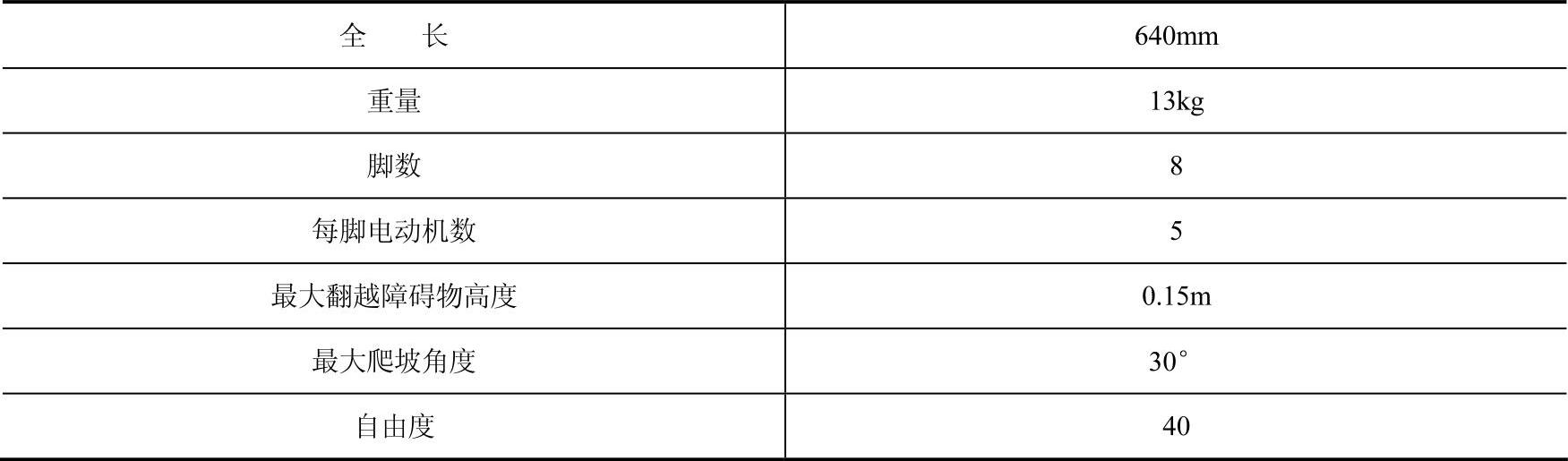
新型节肢机器人的主要结构参数见表4-1。
表4-1 新型节肢机器人的主要结构参数
1.主要机构设计
(1)伺服电动机包围结构 根据伺服电动机的尺寸大小(40.6mm×19.7mm×35.5mm),来确定包围结构外壳的尺寸,并通过精细的测量来确定背板上和伺服电动机对称位置安装轴的位置,从而保证了对称性。此外,在设计时两侧预留出了0.1mm的安装间隙,以方便调整。伺服电动机包围结构装配图如图4-8所示。

图4-8 伺服电动机包围结构装配图
(2)运动足曲臂的设计 运动足曲臂的设计是脚部结构设计的难点,需要综合运动学、动力学、步态规划等多方面因素,并需要兼顾外观设计。由于在进行结构设计之前,机器人的体型参数与多样步态规划的要求决定了机器人腿部结构的第二与第三关节处连杆结构设计的重要性。该连杆结构的设计经历了一个反复的设计过程。起初,根据舵机参数与机器人体型参数指标进行精确计算后,初定运动足为直线型,长度为62.3mm。为了设计简单起见,从几何角度来看,两点之间直线最短,因此采用直线型连接件是最简单易行的解决方案。出于提高结构刚度的考虑,必须在两片运动足结构件之间添加辅助加强板。在通过对机器人虚拟样机的运动学仿真以后,此类设计由于辅助加强板的存在,限制了第三关节处舵机的运动空间,可能在实际运行过程中发生干涉。因此,这种简单的结构设计不利于机器人仿人腿式行走步态的实现,与机器人的步态多样性的功能要求背道而驰。经过研究,并受到人体腿部膝盖关节的启发,确定采用曲臂形式。根据运动足动作的设计要求,曲臂由两部分组成,并要求曲臂前部大于32mm,曲臂后部大于50mm,两轴之间距离大于60mm。通过调整尺寸,使曲臂弯曲角度为90°,前部尺寸35mm,后部尺寸52mm。设前部长度为a、后部长度为b、两轴距离为c,由勾股定理 ,c=62.3mm>60mm,满足设计要求。曲臂尺寸几何关系如图4-9所示,曲臂结构如图4-10所示。
,c=62.3mm>60mm,满足设计要求。曲臂尺寸几何关系如图4-9所示,曲臂结构如图4-10所示。

图4-9 曲臂尺寸几何关系
 (https://www.xing528.com)
(https://www.xing528.com)
图4-10 曲臂结构
(3)同侧两运动足之间距离设计 通过测量可得最底端第五关节伺服电动机轴与足底端橡胶底面之间的距离为82.8mm,而由运动分析可知,运动足要能够绕第五关节伺服电动机轴180°旋转,因此,设伺服电动机轴到胶底距离为l1,两足之间距离为l2,且l2>2l1,因此根据设计要求,将同侧两运动足之间距离设计为180mm,使得两足能够同时旋转且不发生干涉。足部直流电动机结构如图4-11所示,两足之间距离计算如图4-12所示。
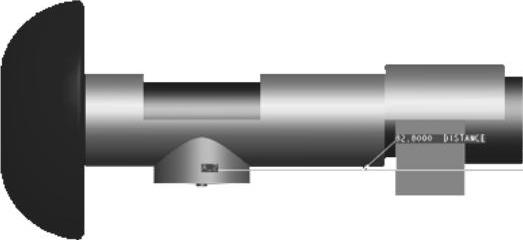
图4-11 足部直流电动机结构
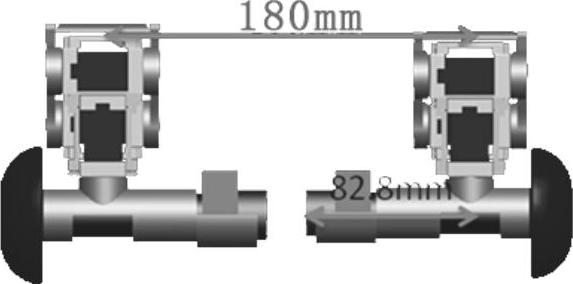
图4-12 两足之间距离计算
(4)轮式足外形设计 当需要实现腿式步态时,需要令足部直流电动机绕第三关节轴心旋转抬起,为保证在抬起过程中转动的平稳,需要将轮式足外轮廓曲线与以第三关节轴心为圆心的大圆相切。通过计算得曲率为22mm。轮式足的曲率计算如图4-13所示。
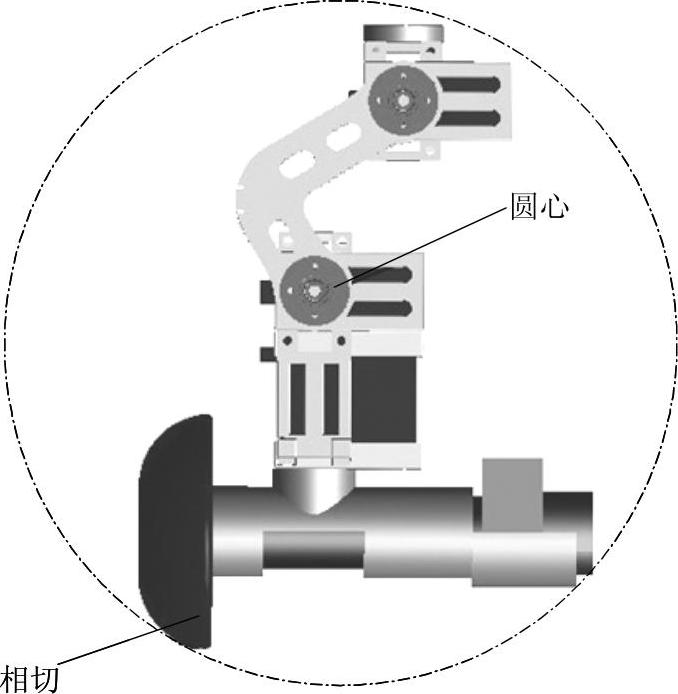
图4-13 轮式足的曲率计算
2.材料选择及加工
通过对新型节肢机器人重量的总体估计和机械结构强度要求的分析,在对各种机械材料进行比较选择的基础上,最终确定采用硬铝(LY12)来作为主结构体的材料。
硬铝(LY12)材料主要性能参数:密度为2.78g/cm3,抗拉强度σb≥425MPa,条件屈服强度σ0.2≥275MPa。该合金强度高,有一定的耐热性,可用作150℃以下的工作零件,其热状态、退火和新淬火状态下成形性能都比较好,热处理强化效果显著。
加工时将利用数控机床,通过UG软件将Pro/E软件生成的.prt文件直接导入,生成加工刀具轨迹,通过数控机床的车、铣和钻孔等操作来对材料进行加工。将对整体加工精度提出较高要求,并强调细小部位圆角的加工精度。精度要求为:连接部位的公差为IT7;其他公差为IT10;除特殊部位(轴承连接处)表面粗糙度为6.3μm。
3.问题及解决方案
1)由于伺服电动机不是标准的长方体,而是梯形体,所以在设计外壳时要求两边的内槽尺寸不同,但是外壳的尺寸要相同。在设计时,可通过对外壳的厚度的不同设计来解决这一问题。
2)由于新型节肢机器人的机械结构均采用铝合金(LY12),所以本身重量偏大。为减轻机器人整体的重量,在保证结构强度的同时,适量地在结构件上设置减重槽可解决此问题。经实验证明,通过此方式可使机器人重量减轻30%以上。
3)运动足底部的直流电动机部分与轮式足相连接,同时轮式足要选用摩擦力大的橡胶材料。由于橡胶容易变形,所以容易导致电动机与轮式足固定不牢靠。经过研究与讨论,选用金属轮芯加橡胶轮套的方案,既能保证直流电动机和轮式足连接的牢靠,又能保证接触地面的轮式足有足够的摩擦力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。