



1.机器人总体设计
新型节肢机器人总体结构如图4-1所示,机器人由电源模块、处理控制核心、运动控制核心、电动机驱动与电动机模块、反馈和传感器模块、无线模块和上位机模块等功能模块组成。
(1)电源模块 电源模块用于为新型节肢机器人处理控制核心模块、运动控制模块、传感器检测模块、电动机模块等各功能模块提供电流。由于新型节肢机器人中共有8个直流有刷电动机和32个直流角位移伺服电动机,以及1片ARM微处理器芯片,1片Freescale MC9S12XS128单片机芯片,4片L298N电动机驱动芯片和无线模块,所以新型节肢机器人的总耗电量很大,需要根据实际实验及计算结果选择合适的电源,并做好过流保护电路。
(2)处理控制核心 处理控制核心是新型节肢机器人的“神经中枢”,接受加速度传感器、超声波传感器、摄像头的环境检测信号,经过处理,通过无线通信发送给上位机,并能够接受上位机的无线控制命令,使机器人执行命令操作。同时,处理控制核心能够自主的控制机器人的步态变换等运动控制,是机器人信息汇总中心。
(3)运动控制核心 运动控制核心是新型节肢机器人的“运动中枢”,主要用于产生控制直流有刷电动机和直流角位移伺服电动机的PWM波形信号,接受上一层处理控制核心的步态和行进方向的控制信号,给下一级的直流有刷电动机的驱动模块和直流角位移伺服电动机控制信号,从而使机器人进行各种步态变换和行进方向的转变,是整个机器人运动控制的核心所在。
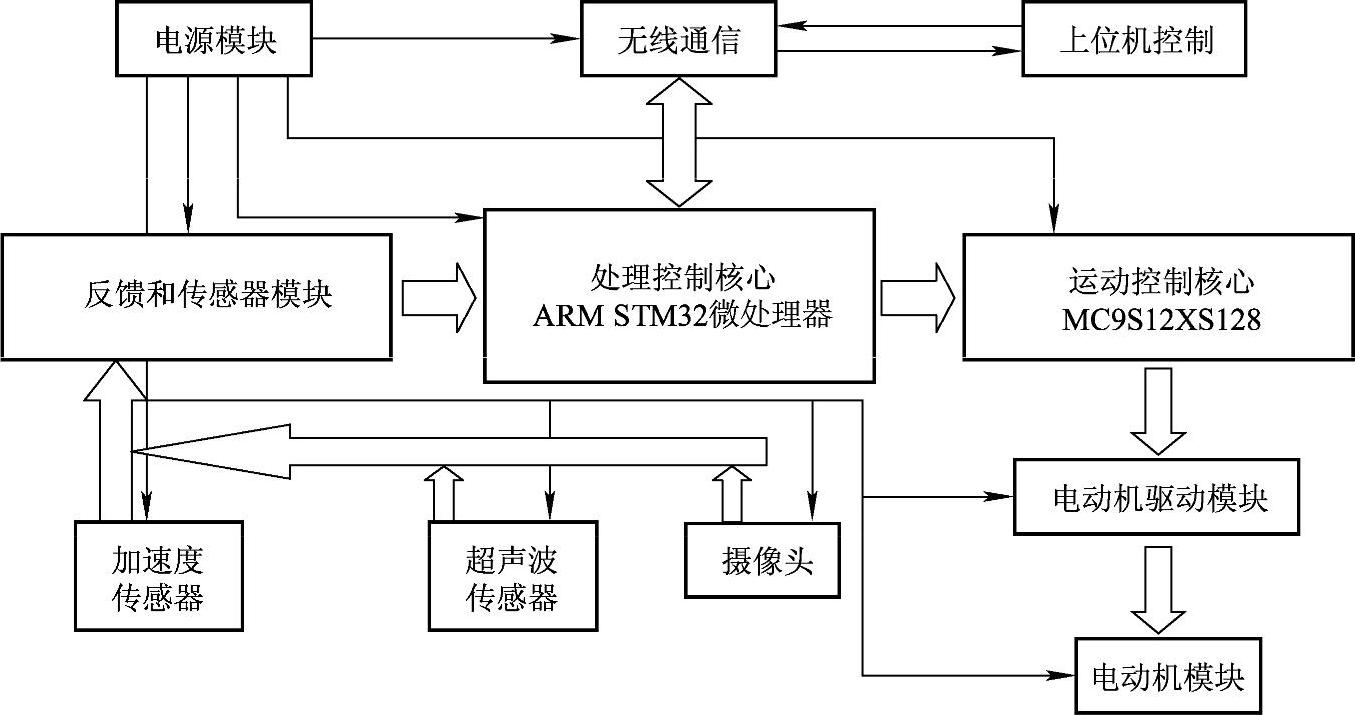
图4-1 新型节肢机器人总体结构
(4)电动机驱动与电动机模块 电动机驱动模块主要是针对8个直流有刷电动机的驱动,而32个直流角位移伺服电动机其内部有自带的驱动模块,不需要在机器人中另外添加驱动模块。电动机驱动模块主要用于为直流有刷电动机的转动提供电流,从而使电动机能按照控制信号高速转动。电动机模块包括8个直流有刷电动机和32个直流角位移伺服电动机,其中直流有刷电动机用于新型节肢机器人轮式滚动时作为前进运动足,直流角位移伺服电动机能根据控制信号PWM的占空比定位在需要的角度,构成机器人32个关节,是控制新型节肢机器人运动足作腿式前进或是轮式前进方向的执行机构。
(5)反馈和传感器模块 新型节肢机器人中用于反馈的传感器有加速度传感器,能检测机器人在xyz三个方向的加速度,从而能检测到机器人的姿态信息,能够为处理控制核心控制机器人的姿态以适应各种地形提供姿态信息。新型节肢机器人中用于环境检测和视觉系统的传感器为超声波传感器和摄像头,其中超声波传感器能够测量机器人与周围障碍物或者目标障碍物的距离,从而使得新型节肢机器人具有自动避障功能和目标测距功能,而摄像头能够转动检测机器人前方180°范围内的视频图像信息,并能将视频图像信息通过无线通信传输给上位机,用于进行环境勘测和远程遥控。
(6)无线模块和上位机模块 无线模块是新型节肢机器人处理控制核心与上位机进行信息交流的平台,一方面能把机器人的传感器检测的环境信息传给上位机进行环境监察,另一方面能够将上位机的控制指令传给机器人的处理控制核心,从而实现远程遥控。
2.机械结构设计
新型节肢机器人的机械结构设计框图如图4-2所示。
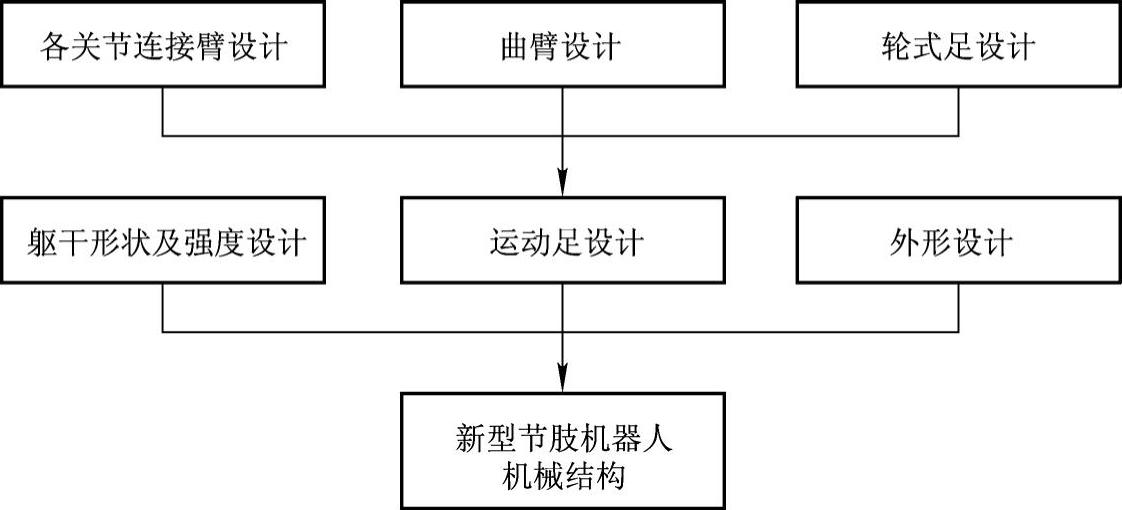
图4-2 机械结构设计框图
新型节肢机器人的机械结构由主体躯干和8条多轴运动腿组成,其中运动腿沿中轴线对称分配在主体躯干两侧,构成左右对称的机体。依靠运动足的独特机械设计和关节布局,使得机器人能完成几十种运动步态,并能跨越一定高度的障碍物。因此,运动足的设计是这个机器人机械设计的重点工作。其中,各运动足之间的距离间隔设计,使得机器人在前进或后退时的步长和运动能满足设计要求,不至于运动时前后腿相冲突;运动足各关节之间的距离设计,可使得机器人的各关节能在预定的角度范围内转动;运动足足底滚轮的斜率设计,可使得机器人在横向侧行步态时腿部弯曲的角度恰好使滚轮着地点与地面相切。同时,躯干部分作为机器人的运动足主要支撑和连接构件,其形状和强度设计也是很重要的。躯干部分与各运动足的连接点分布应当均匀,且躯干部分的设计还关系到机器人的重力分布和各部分的机械强度。此外,新型节肢机器人的外观工业设计是展现机器人风采和特色的重要方式。新型节肢机器人实物样机如图4-3所示。(https://www.xing528.com)

图4-3 新型节肢机器人实物样机
3.硬件平台设计
硬件电路框图如图4-4所示。
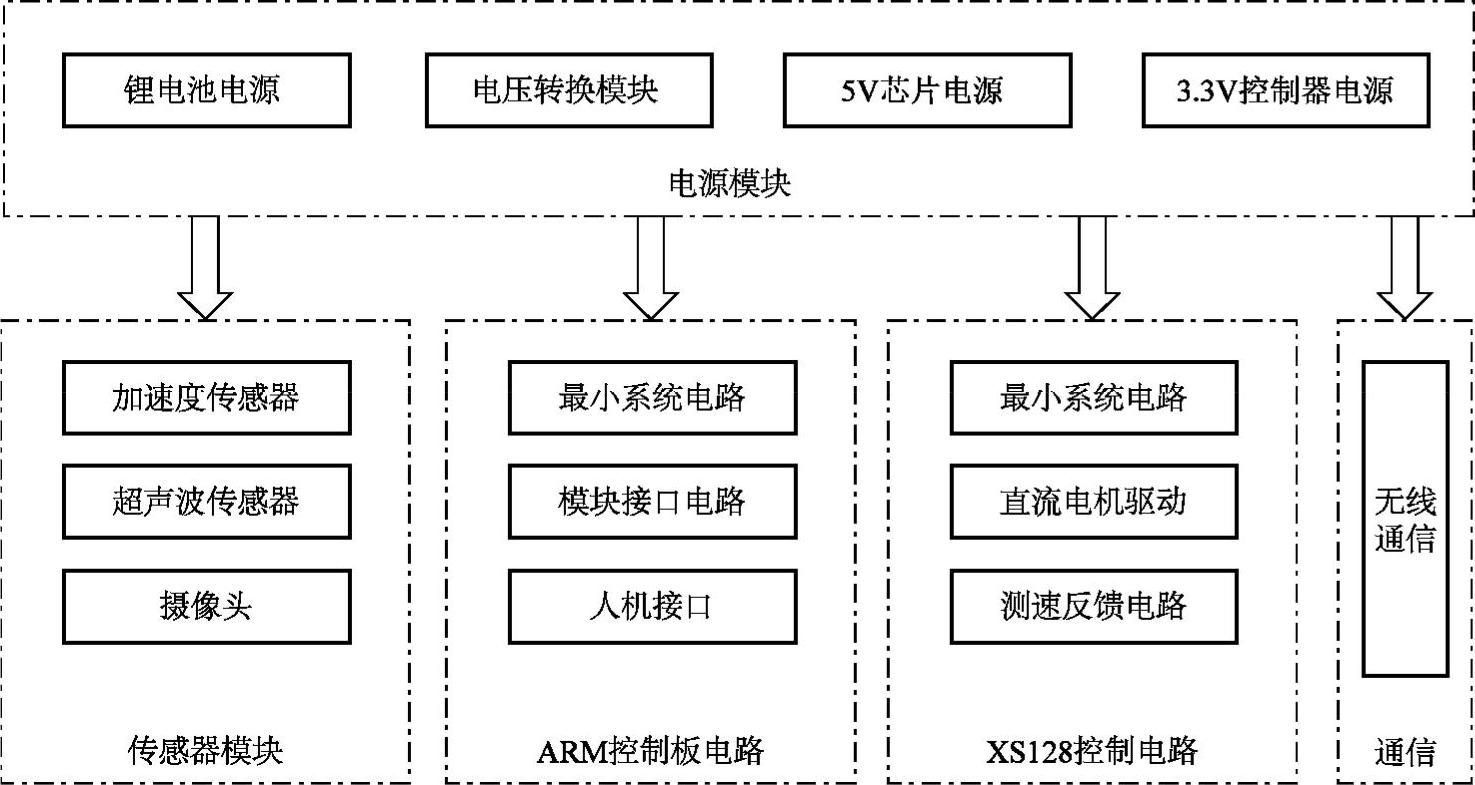
图4-4 硬件电路框图
新型节肢机器人的硬件电路主要包括电源电路、传感器电路、ARM控制板电路、XS128控制电路和通信模块电路。其中由于锂电池电压一般为3.7V和7.4V等,ARM芯片所需电压为3.3V,其他芯片一般都为5V,所以在电源模块中应当包括为各芯片供电的电压转换电路,而且机器人中电动机数量较多,在电源模块中应当有电源的过流保护措施。硬件平台中ARM控制板电路是新型节肢机器人的硬件控制核心,与传感器电路、电动机驱动控制电路、通信模块都有通信接口,是硬件电路的第一级控制电路。XS128控制电路是关键的硬件控制中心,所有电动机的驱动和控制、反馈信号都在此硬件电路中实现。此外,传感器和通信模块具有独立的硬件电路模块。
4.软件平台设计
软件平台结构框图如图4-5所示。
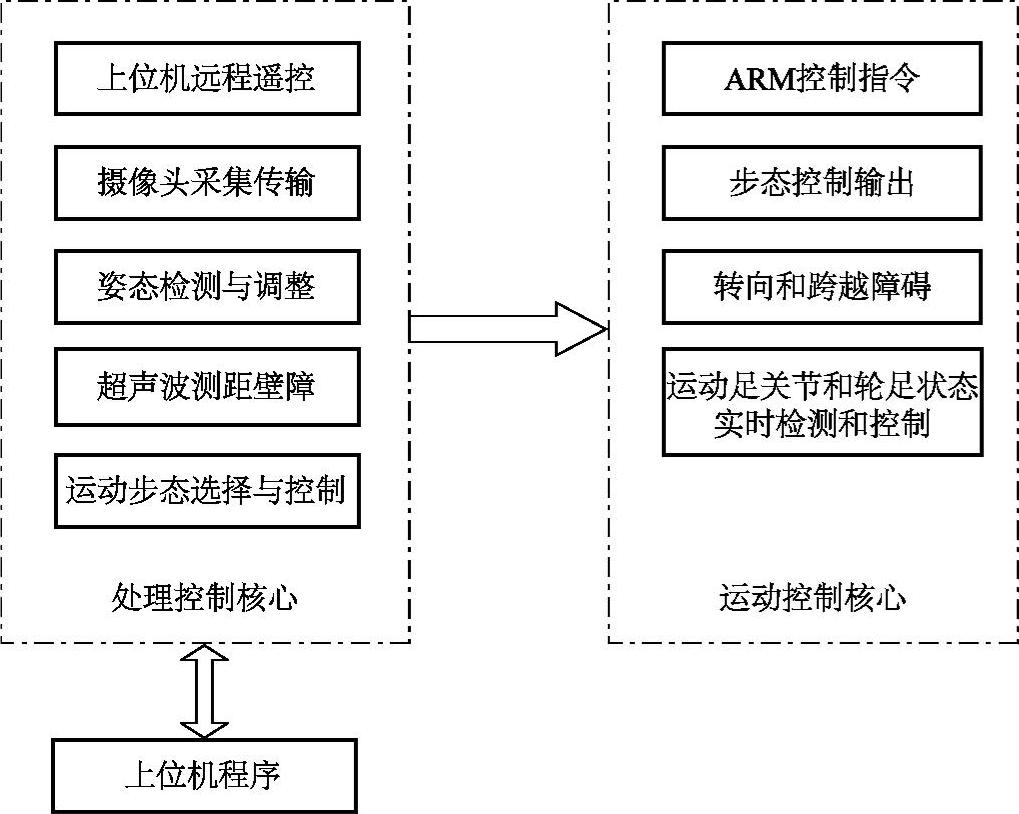
图4-5 软件平台结构框图
软件平台设计主要是对新型节肢机器人的两个控制芯片即处理控制核心芯片ARM stm32和运动控制核心芯片Freescale MC9S1 2XS128的软件程序编写,以及无线通信的上位机显示界面与控制程序编写。
在软件编程过程中,将分层递阶的控制思想映射到程序中,将传感器检测信号、上位机控制信号、机器人总体运动状态等集中于处理控制核心的软件编程,而将各个电动机的驱动、运动步态和方向的实现集中于运动控制核心的软件编程,从而使得信息处理与运动控制在一定程度上相互独立而又彼此相关,控制思路清晰明了。上位机程序将主要用来显示摄像头传送的环境信息,发送上位机控制指令。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。