



1.机器人3D Max虚拟仿真
当在Pro/E中建模完成后,打开“文件”→“保存副本”。在“保存副本”对话框中选择导出的路径并对名称进行修改,在“类型”选项中按下拉箭头,将其保存为3D Max可以打开的文件类型,如STL、OBJ等。本设计采用OBJ格式导出,在弹出的对话框中,单击“添加”按钮,再选择零件的坐标系,单击“确定”按钮将文件导出。
打开Autodesk 3D Max 9启动按钮,进入操作界面,如图3-27所示。
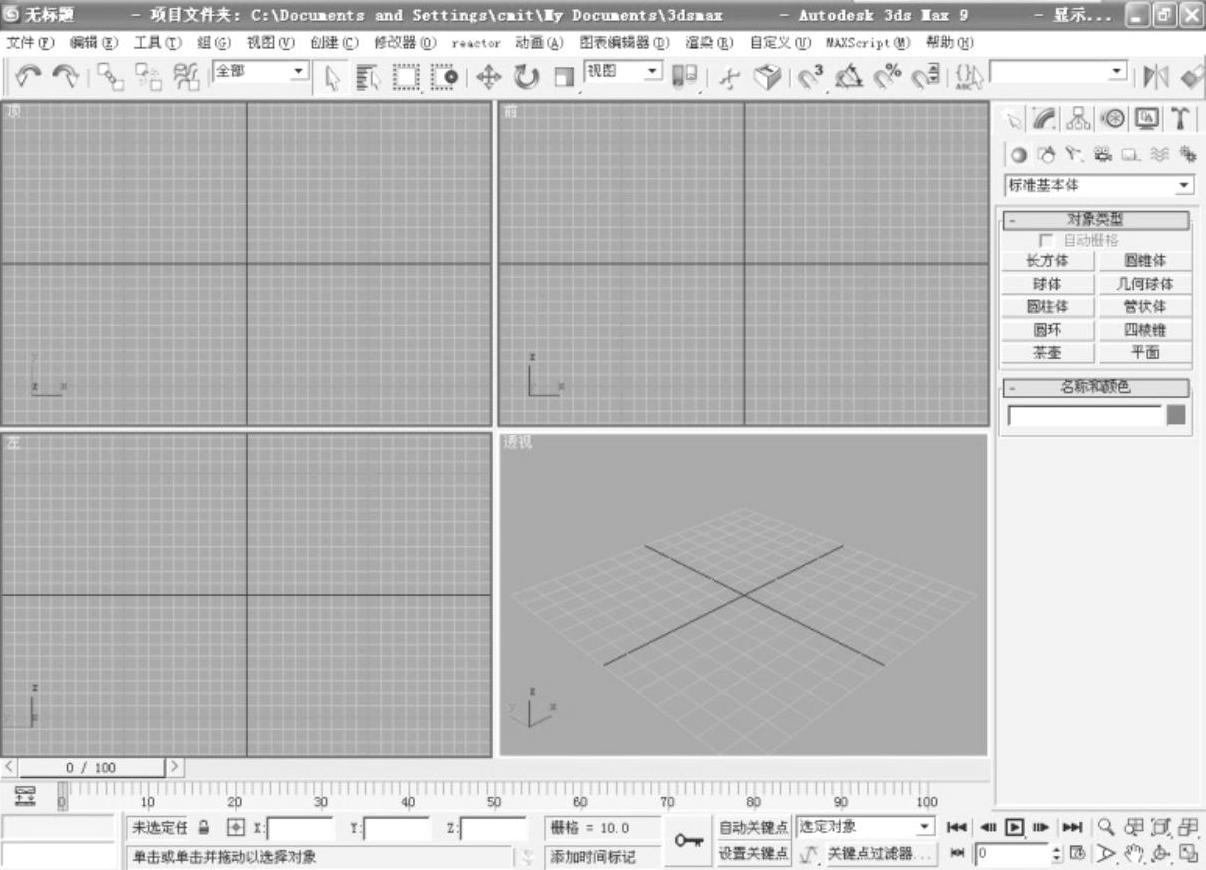
图3-27 3D Max操作界面
选择“文件”→“导入”,查找之前Pro/E导出的文件地址,同时在文件类型中选择之前导出的文件类型。单击“确定”按钮后,会弹出一个导入器对话框如图3-28所示,单击“确定”按钮导入零件。
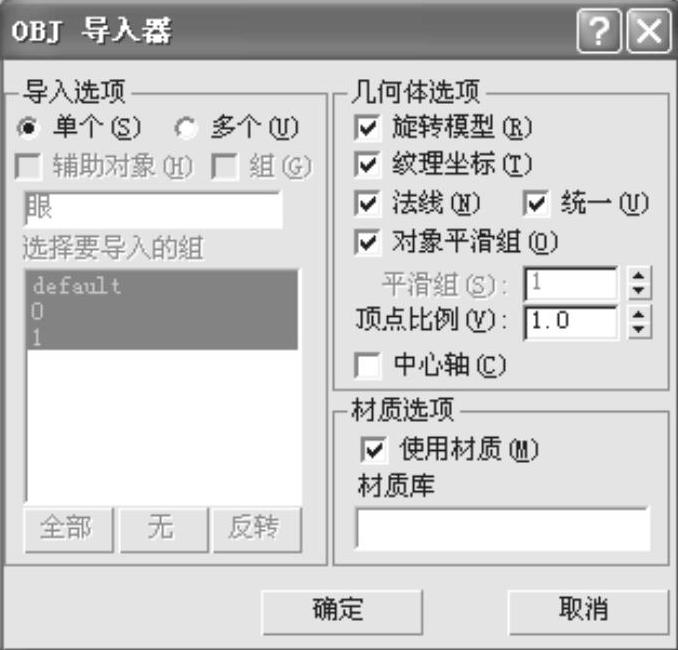
图3-28 导入器对话框
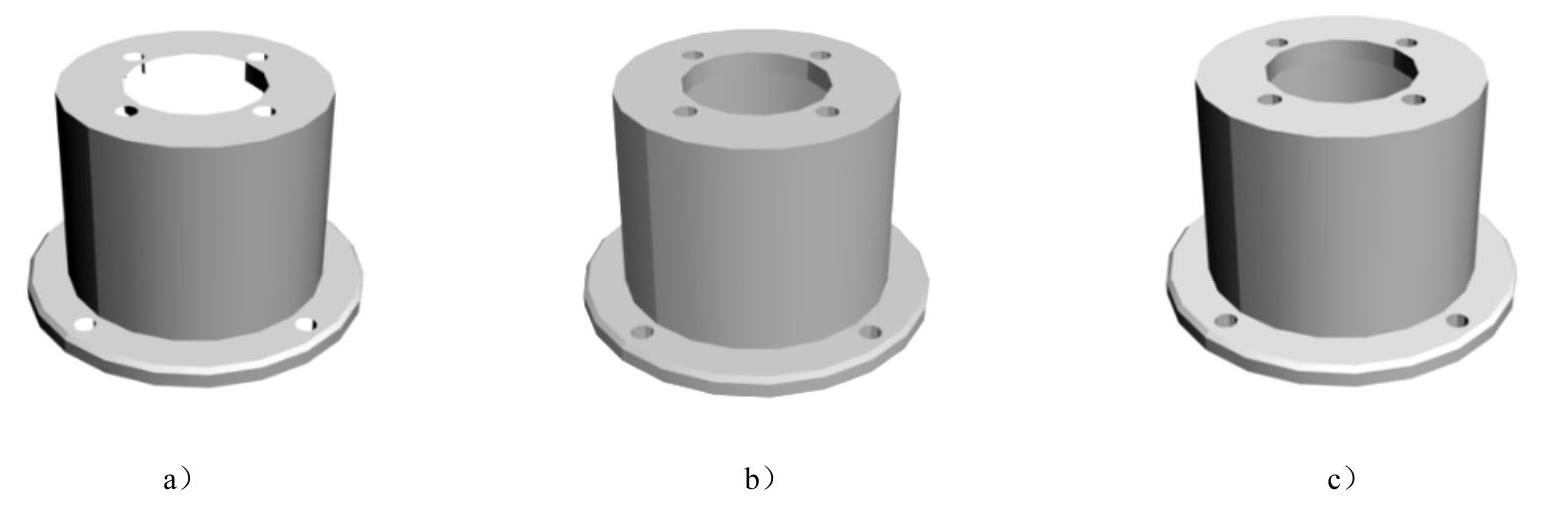
在零件导入以后,如图3-29a所示,曲面上会有很多棱边,要使零件看起来更平滑,可以按以下步骤进行设置:①选择零件,单击界面右侧的“修改”按钮;②在“修改器列表”中选择“平滑”;③复选平滑参数栏中的“自动平滑”。经过设置之后,零件表面变得平滑了许多,如图3-29b所示。
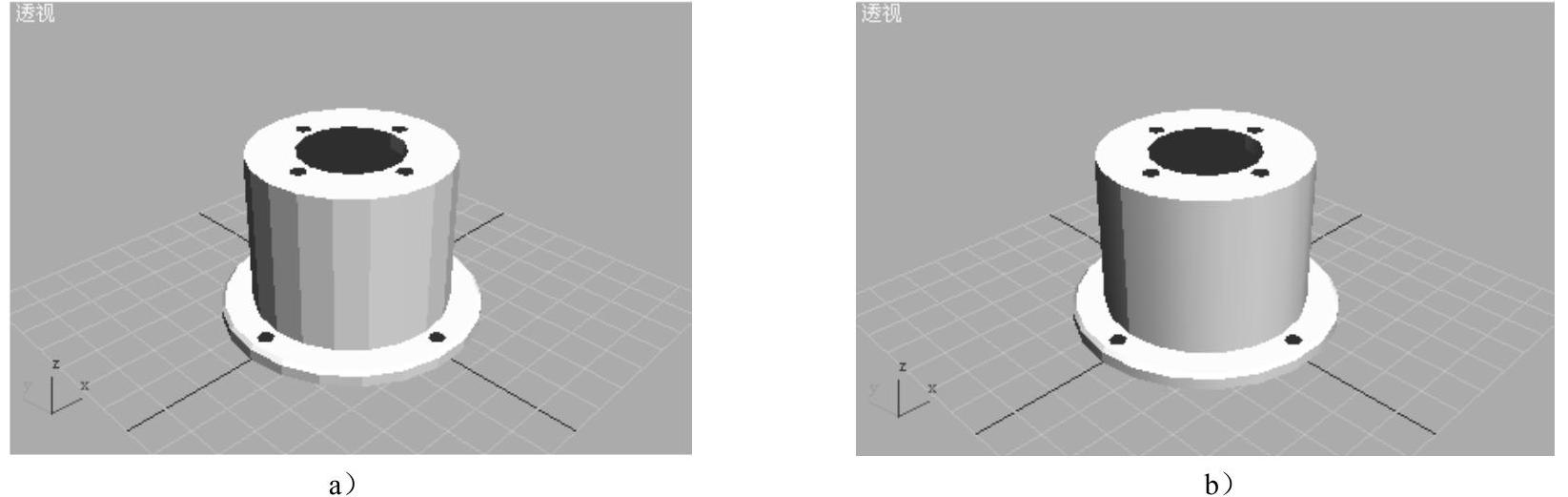
图3-29 “平滑”修改对比图
a)修改前 b)修改后
修改完零件后,按快捷键F9,可以看到渲染的效果图,如图3-30a所示,此时发现零件会有缺损的情况。下面对零件进行再次修改:
1)选择零件,按快捷键M,打开材质编辑器。
2)在“明暗器基本参数”栏中复选“双面” 。
。
3)单击 按钮,将编辑好的材质指定给选定对象。
按钮,将编辑好的材质指定给选定对象。
再次按快捷键F9,可以看到渲染后的零件不再有缺损的现象,如图3-30b所示。不过由于零件的材质改变了,颜色也发生了变化,因此在将材质指定给对象前,要先对材质的颜色或图案进行编辑,但这样一来,每导入一个零件都需要对材质进行编辑,非常烦琐。下面介绍一种更快捷的方法来解决修改零件的“缺损”问题。
1)选择菜单栏中的“渲染”→“渲染场景”,或者按快捷键F10;
2)打开“渲染场景”窗口,在“选项”栏中复选“强制双面”;
3)单击“渲染场景”窗口右下角的“渲染”按钮。
在弹出的“渲染”窗口中发现零件不再缺损,如图3-30c所示。渲染效果同前一种方法,不过这种方法不需要对每个零件进行编辑,效率更高。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-30 零件渲染效果图
在导入零件后,可以通过“选择并平移”按钮或“选择并旋转”对零件进行移动或旋转,对于要求精确定位,可以在平移按钮或旋转按钮上单击右键,在弹出的窗口栏中对零件的坐标进行编辑,如图3-31所示。
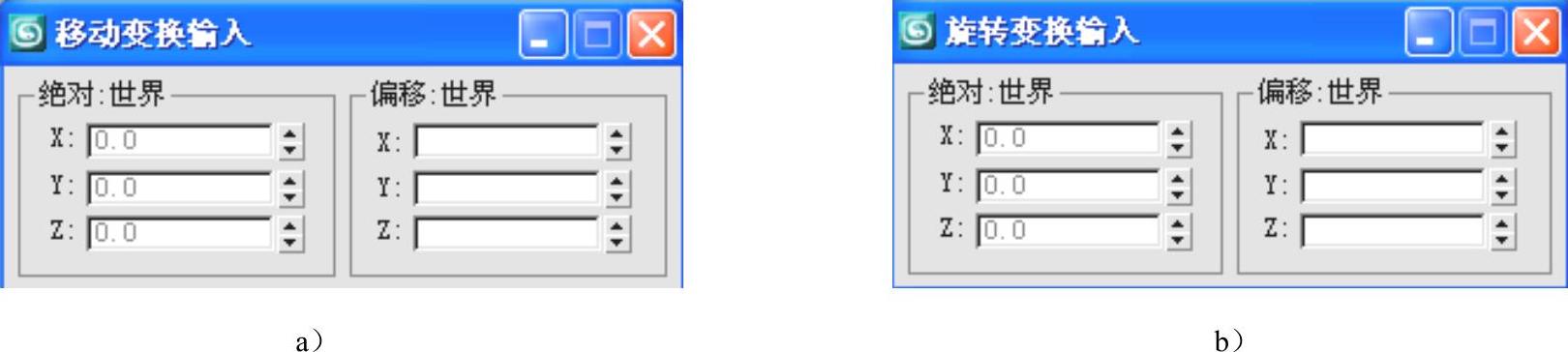
图3-31 零件平移或旋转的窗口栏
a)移动变换输入 b)旋转变换输入
因篇幅有限,在这里就不对所有零件的动画制作过程进行说明。下面给出使用3ds Max制作动画的几点经验。
1)当用户在制作动画的过程中需要改变零件初始位置,必须在关闭“设置关键点”按钮的情况下(亦即该按钮成灰色状态)对零件进行编辑。若用户在“设置关键点”按钮开启(这时按钮成红色状态)的状态下对零件进行编辑,即使设置了关键点,在播放动画的过程中零件将出错,偏离预想的位置。
2)在动画制作过程中,可多按几次 ,设置好关键点。不然,当移动到其他帧时,原本设置好的动作在未保存的情况下将丢失,用户则需要再次对动画进行编辑。
,设置好关键点。不然,当移动到其他帧时,原本设置好的动作在未保存的情况下将丢失,用户则需要再次对动画进行编辑。
3)在做动画的过程中,对同组或同系统的零件可创建“集”,如将本作品中的电动机和减速器设置为一个“电动机组”的集,将连接电动机与侧板的螺钉设置为一个集。当到后期有许多零件时,就不需要在“按名称选择对象”中一个一个查找,可以直接在“命名选择集”中选择需要的对象。
图3-32为几个制作动画时的时刻视角。
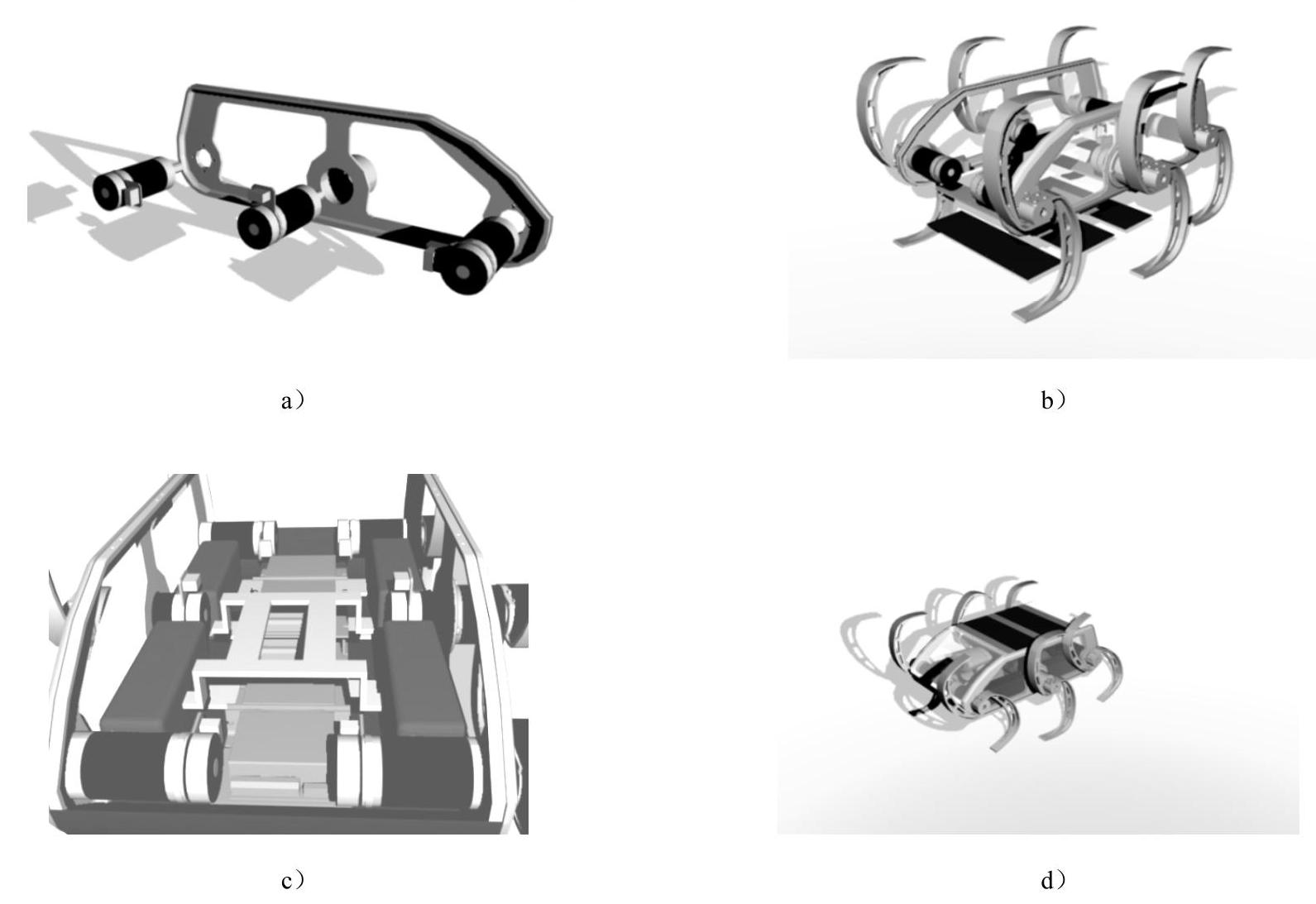
图3-32 新型轮腿式机器人3D Max动画
为了规划新型轮腿式机器人在采用三角步态运动时各腿间的相互关系,利用3ds Max对机器人执行三角步态时各腿间的相互关系进行模拟仿真,以确定正确的运动参数,其步态模拟如图3-33所示。图3-34为各腿转角期望值与实际值拟合图。
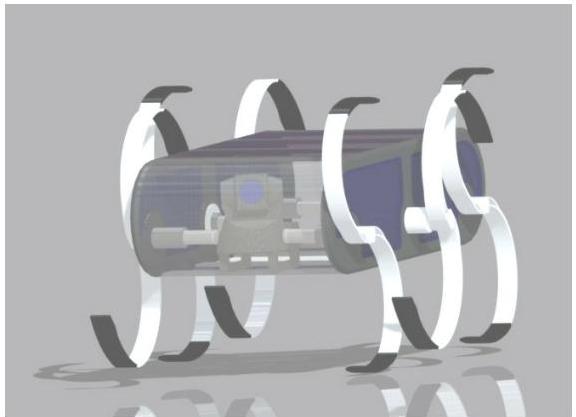
图3-33 新型轮腿式机器人三角步态模拟
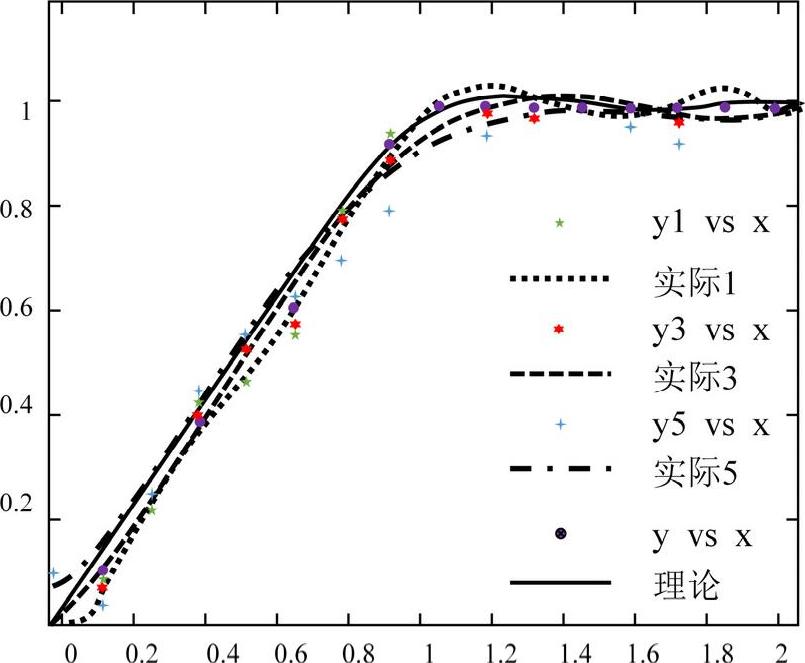
图3-34 各腿转角期望值与实际值拟合图
2.机器人样机实验
为验证前面理论分析与虚拟仿真的正确性,对新型轮腿式机器人样机进行运动步态实验,包括起动步态、三角步态等,实验情况如图3-35所示。实验结果证明新型轮腿式机器人能够完成起立、行进等多项运动,达到了运动速率和灵活性的协调统一。此外,配合多传感器信息融合技术和数字图像处理技术,新型轮腿式机器人能够可靠、稳定地实现自主避障和特种侦查等功能。
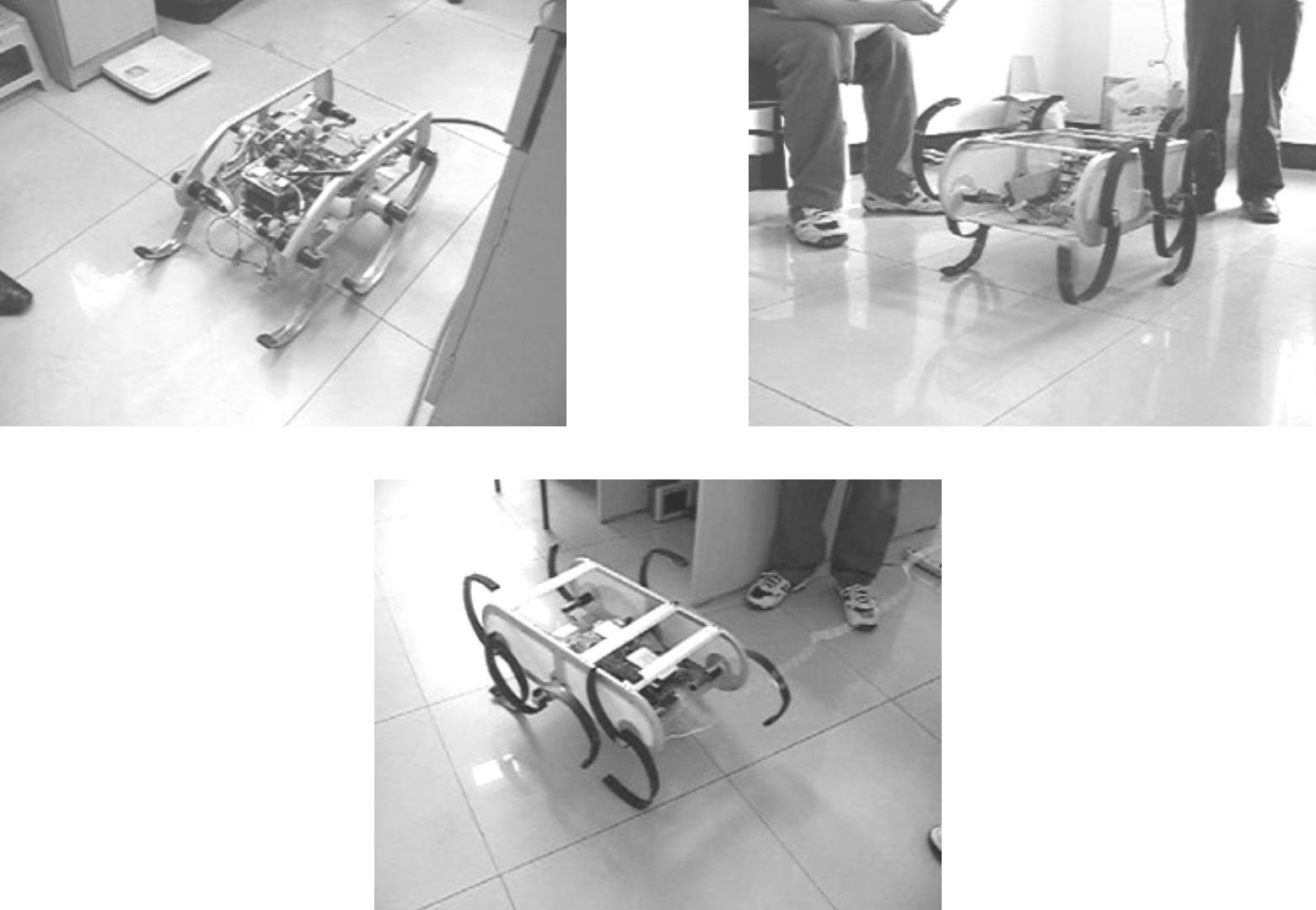
图3-35 新型轮腿式机器人起动步态及三角步态的实现
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。